





В данной работе ставится задача идентификации математической модели, которая описывает колебания сил резания при точении [2]. На рис.1 представлен график изменения силы резания в процессе точения.
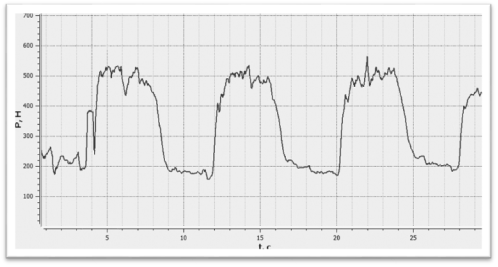
Рис.1. Изменение силы резания при точении
На графике видно, что кривая изменения силы резания имеет экспоненциальный вид с наложенной переменной составляющей силы резания. Наличие этой составляющей обусловлено упругостью системы. Для исследования природы переменной составляющей (в работе [1]) была получена аналитическая модель упругой системы станка, учитывающая относительное перемещение резца и заготовки в процессе резания. Данная модель представлена на рис.2.
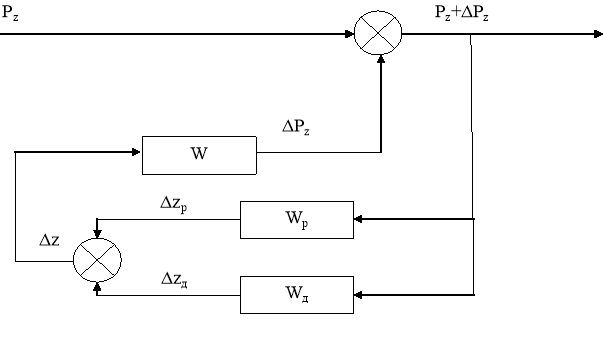
Рис.2. Модель системы резец-заготовка
Модель упругой системы станка имеет следующую передаточную функцию:
|
|
(1) |
Идентификацию модели проведем на основе данных, полученных в результате эксперимента. Данный эксперимент заключался в ударном воздействии на заготовку и исследовании отклика с помощью акселерометра. При этом заготовка была поджата обратной стороной резца (для исключения поломки режущей пластины) с силой, соответствующей номинальной силе резания при заданных режимах резания.
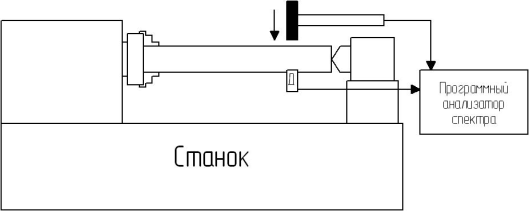
Рис.3. Схема эксперимента по снятию частотных характеристик
В ходе эксперимента были получены следующие амплитудно-частотные характеристики упругой системы станка:
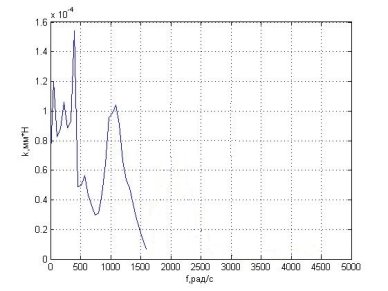
Рис.4. АЧХ экспериментальной модели
Модель, полученная аналитическим путем, должна иметь аналогичные частотные характеристики.
Для нахождения характеристик была составлена программа поиска оптимальных коэффициентов математической модели упругой системы станка в Matlab, текст которой приведен ниже:
loaddata20A5.mat% загрузка данных
X=[ 1 1 1 1 1 1]%задание начальных значений коэффициентов
options=optimset('display','iter');%задание опций для функции поиска коэффициентов
X=fminsearch('koleb',X,options,A,f);% задание функции подбора оптимальных коэффициентов
functionf=koleb(X,A,f); % создание файла функции
K=X(1); % ввод начальных коэффициентов
T2=X(2);
T1=X(3);
K2=X(4);
T22=X(5);
T21=X(6);
Wk=10; % ввод моделей звеньев системы
W1=tf([K],[T2 T1 1]);
W2=tf([K2],[T22 T21 1]);
W6=feedback(W1,Wk); % соединение элементов обратной связью
W5=feedback(W2,Wk);
W=W5+W6;
[mag, phase] = bode(W,f); % расчет векторов амплитуд и фаз частотной характеристики
mag=(mag(1,:))'; % построениеАЧХ
figure(2)
plot(f,mag,'r',f,A)
f=(sum(abs(A-mag)); % критерий подбора коэффициентов
В результате были получены передаточные функции звеньев исследуемой модели:
|
|
(2) |
На рис.4 изображены частотные характеристики обоих моделей.
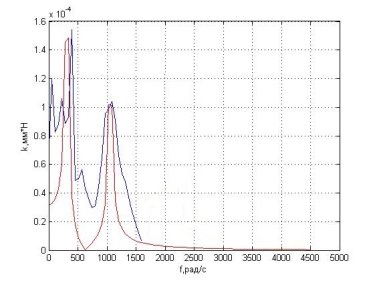
Рис.4. АЧХ экспериментальной и аналитической моделей
Модель, полученная аналитическим путем, с достаточной точностью описывает экспериментально снятую АЧХ упругой системы станка. Это обосновывает дальнейшее изучение данной модели для использования ее при построении систем управления процессом резания.
Литература:
- Кудинов В. А. Динамика станков // М., Машиностроение, 1967.
