





Инерционные конвейеры с постоянным давлением на дно желоба не получили широкого применения, т.к. постоянное трение груза о желоб вызывает значительное сопротивление транспортированию, изнашивание желоба и значительные нагрузки на привод, связанные с бигармоническим характером колебаний желоба [1]. Разработанная конструкция инерционного тележечного конвейера с переменным сопротивлением движению тележки-спутника при прямом и обратном ходе рамы, позволяет исключить недостатки известных инерционных конвейеров с постоянным давлением груза на дно желоба и тем самым расширить область их применения в частности для перемещения и ориентирования штучных грузов различной геометрической формы [2].
Конструкция такого конвейера (рис. 1) представляет собой приводную, с возможностью возвратно-поступательного перемещения по неподвижному основанию направляющую раму 1, установленную на опорных катках 2, привода 3 рамы, ловителей 4 тележек-спутников 5, выполненных в виде поворотной платформы 6, соединённой шарниром 7 с опорной платформой 8 имеющей опорные катки 9 с механизмами свободного хода, на которой на неподвижных осях 10 смонтированы катки 11, оснащённые механизмами свободного хода 12.
Для транспортирования и ориентирования груза тележки-спутники 5 с закрепленными на них грузами устанавливаются на направляющие рамы 1, которая после включения привода 3 начинает совершать возвратно-поступательные перемещения, опираясь на неподвижное основание через опорные катки 2.
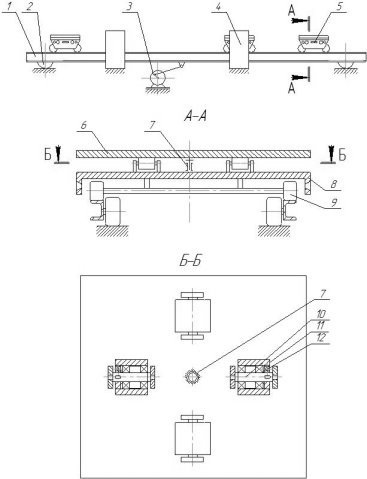
Рис. 1. Принципиальная конструктивная схема инерционного тележечного конвейера
При прямом ходе, т.е. когда рама 1 с тележками-спутниками 5 движется в сторону транспортирования, сила инерции груза и опорной платформы стремится вращать опорные катки 9 в направлении противоположном транспортированию, чему препятствуют механизмы свободного хода. При этом сила трения между опорными катками 9 и направляющими рамы 1, преодолевая силу инерции, вовлекает в совместное движение тележку-спутник. Кроме того, сила инерции груза стремится также вращать катки 11 в направлении, противоположном транспортированию, но так как катки одной пары, расположенных на одной геометрической оси имеют возможность вращаться только в разные стороны посредством механизмов свободного хода, то между заторможенным катком и поворотной платформой с грузом возникает сила трения, а незаторможенным – сила сопротивления качению, которая значительно меньше силы трения. Линия действия равнодействующей этих сил не совпадает с линией действия силы инерции, в результате чего возникает момент, вращающий поворотную платформу на катках с грузом. При этом, имеющие возможность вращения в противоположных направлениях катки другой пары, расположенных на одной геометрической оси параллельной оси конвейера не препятствуют вращению поворотной платформы в сторону упомянутого возникающего момента.
При обратном ходе рамы тележки-спутники под действием силы инерции груза, преодолевая сопротивление качения опорных катков по направляющим, продолжают перемещаться в сторону транспортирования, так как механизмы свободного хода не препятствуют вращению опорных катков по направляющим рамы, а поворотная платформа с грузом будет находиться в неподвижном повернутом положении до завершения обратного хода рамы. Далее процесс повторяется.
На основе проведенных теоретических исследований, изложенных в [2], с целью приложения полученных в работе результатов к практике реального проектирования конвейеров без тягового органа для транспортирования и ориентирования штучных грузов различной геометрической формы предлагается методика инженерного расчета основных параметров инерционного тележечного конвейера, алгоритм которой представлен на рис. 2.
В качестве исходных данных для расчета необходимо задать:
1. Масса транспортируемого груза и тележки – mгр;
2. Габариты груза: длина х ширина х высота, SxBгрxH ;
3. Длина транспортирования – Lтр;
4. Интенсивность подачи грузов, которая может характеризоваться производительностью – П.
В качестве искомых параметров необходимо определить:
- Расположение тележек с грузом на конвейере (шаг расстановки) в зависимости от средней скорости транспортирования и производительности (интенсивности).
- Параметры привода рамы конвейера, а именно:
угловая скорость – ω;
приведенные коэффициенты сопротивления, возникающие при перемещении тележки и рамы, соответственно – δт, δр;
амплитуда колебаний рамы – А.
- Конструктивные параметры тележки.
- Подбор остановов.
- Уточненный расчет параметров колебаний рамы конвейера.
- Мощность привода конвейера.
Производительность конвейера зависит от скорости перемещения груза. Например, рекомендуемые скорости транспортирования приводными конвейерами в условиях гибких производственных систем (ГПС) принимают от 2 до 12 м/мин, что соответствует значениям 0,03–0,2 м/с, в этом случае одним из важных факторов является расчет интенсивности грузопотока, которая напрямую зависит от времени обработки детали на технологическом оборудовании.
1. Шаг расстановки тележек с грузом на конвейере определяется в зависимости от заданной производительности и выбираемой по номограмме [2] средней скорости транспортирования груза:
при перемещении штучных грузов массой mгр
![]() , (1)
, (1)
при перемещении штучных грузов, учитывающих только количество груза
 , (2)
, (2)
где ап – шаг расположения тележек на конвейере; z – количество груза в одной партии; ![]() – средняя скорость транспортирования груза.
– средняя скорость транспортирования груза.
2. Предварительно принимаются угловая скорость – ω, приведенные коэффициенты сопротивления, возникающие при перемещении груза на тележках δт, амплитуда колебаний рамы – А.
Полученные значения уточняются в зависимости от массы транспортируемого груза, конструктивных параметров тележки, рамы конвейера.
3. Определение параметров тележки необходимо вести по рекомендуемым методикам расчета, изложенных в [2].
4. Подбор остановов проводится по максимальному крутящему моменту, передаваемого обгонной муфтой с определением возможности встраивания ее в каток:
![]() , (3)
, (3)
где ат– максимальное ускорение тележки, м/с2.
Предварительно максимальное ускорение можно принять равным максимальному ускорению рамы:
![]() (4)
(4)
5. Уточненный расчет параметров колебаний рамы конвейера.
В зависимости от предполагаемых размеров тележки, определяется ориентировочная масса катков, масса вращающихся частей катков. Следует отметить, что необходима проверка условий (5) с целью выбора рациональных параметров колебаний рамы:
 , (5)
, (5)
где mк – масса вращающихся частей катков.
Затем конструктивно определяются габариты рамы и в зависимости от количества и массы перемещаемого груза проводятся проектировочные расчеты рамы конвейера с определением ее массы, подбора опорных катков, расчета их осей и подшипников.
Приведенный коэффициент сопротивления движения тележек:
 (6)
(6)
где Wт – общее сопротивление, возникающее при движении тележки по направляющим.
Приведенный коэффициент сопротивления движению рамы будет:
где c – количество конвейеров, работающих от одного привода, шт.; mр – масса рамы конвейера, кг.
Угловая скорость привода уточняется на основании условия отсутствия проскальзывания между опорной поверхностью рамы и опорных катков.
Максимально допустимая амплитуда колебаний рамы также определяется из условия отсутствия скольжения тележки по направляющим в зависимости от полученной угловой скорости привода конвейера.
После уточненного определения параметров колебаний рамы конвейера по определяется время цикла T=2π/ω и время свободного движения груза t1 на конвейере [2] для определения максимального ускорения груза мощности привода для уточнения крутящего момента по (3).
Мощность конвейера:
![]() . (9)
. (9)
Далее подбирается электродвигатель и обязательно проводится проверка на нагрев по типовым методикам.
Приведенный алгоритм инженерного расчета основных параметров инерционного тележечного конвейера вполне можно описать при помощи систем автоматизированного проектирования.
Литература:
- Лускань О.А. Импульсные конвейеры для обслуживания гибких производственных систем // Машиностроение и техносфера ХХI века. Сб.трудов XVII международной научно-технической конференции. Донецк – 2010. – Т.2 – С.119-122.
- Лускань О.А. Основы теории импульсных инерционных конвейеров. Дисс… на соиск. учен. ст. докт. техн. наук, Новочеркасск – 2011.
