





В статье рассматриваются различные виды систем видеосопровождения, применяемых в беспилотных летательных аппаратах (далее по тексту — БПЛА). Проводится сравнительный анализ и обосновывается выбор типа сопровождения.
Ключевые слова: беспилотный летательный аппарат, оптический координатор, видеосопровождение.
Одной из важных областей применения системы обработки, хранения и анализа, фото- и видеоинформации являются системы обнаружения и сопровождения объектов. Эти системы применяются в летательных аппаратах разных классов, автомобилях, а также стационарных объектах. Целями для таких систем могут служить люди, летательные аппараты, автомобили и другая техника. При этом обнаружение и сопровождение возможно осуществлять в различной фоновой обстановке — например, лес, дома, дороги, облака. В зависимости от ситуаций, изображения целевых объектов могут иметь различные размеры — точечные или протяженные.
Особое значение системы обнаружения и сопровождения объектов имеют в военной технике. Современный этап развития вооружения обусловлен изменением характера угрозы в военных конфликтах:
на первый план выдвигается борьба с террористическими группировками;
более актуальной становится задача защиты государственных границ, в особенности большой протяженности, от проникновения вражеских сил;
военные столкновения происходят в условиях отсутствия четко очерченных границ между противоборствующими сторонами, то есть теряется такое понятие как «линия фронта».
Изменившаяся оперативно-тактическая обстановка требует адекватной концепции построения современного вооружения. Выдвигаются требования бесконтактного уничтожения противника. При этом должна быть обеспечена высокая точность для прямого попадания в цель.
В настоящее время широкое развитие получают беспилотные летательные аппараты различных классов, поэтому создание перспективных систем вооружения невозможно без широкого применения систем обработки изображений.
Разрабатываемый разведывательно-ударный беспилотный летательный аппарат предназначается для поиска и уничтожения следующих сухопутных и надводных объектов:
колонны бронетехники;
доты, блиндажи, долговременные огневые сооружения;
живая сила противника;
надводные корабли и лодки;
Регистрация изображений, применяемая в таких системах, осуществляется цифровыми методами, а стабилизация применяется для компенсации собственных движений камеры и предотвращения смазывания изображения. При этом система стабилизации не в состоянии компенсировать движение объекта. Для решения задачи сопровождения объекта применяются системы слежения.
В зависимости от типа решаемой задачи построение систем возможно по различным схемам: одно-, двух- и трехканальным (каналы могут быть взаимосвязаны между собой или быть независимыми). Автоматическое сопровождение объекта оптико-механической системой предполагает непрерывное совмещение оптической оси видеодатчика системы с направлением на объект, осуществляемое приводами системы с использованием информации о координатах сопровождаемою объекта в последовательности кадров изображений видеодатчика.
Система видеосопровождения (СВС), укрупненная функциональная схема которой показана на рис. 1, содержит электрические приводы отработки заданных угловых положений рамок карданного подвеса, связанные механически с видеодатчиком (ВД), датчики угловых положений рамок исполнительного устройства относительно некоторого начального положения, вычислительное устройство (ВУ) для оценки координат сопровождаемого объекта в прямоугольной системе координат изображения.

Рис. 1. Функциональная схема СВС
Задача СВС состоит в постоянном совмещении оптической оси видеодатчика с направлением на объект по данным блока обнаружения и определения координат (БООК). Основными факторами, влияющими на величину ошибки сопровождения, являются угловая скорость и ускорение изменения направления на объект, малая величина стандартной частоты формирования видеокадров, ошибки вычисления координат объекта из-за пиксельного (дискретного) характера представления изображения, величина запаздывания, вносимого БООК.
Для решения задачи непрерывного во времени совмещения оптической оси видеодатчика с направлением на объект достаточно двухосного карданного подвеса, что и делается в ряде случаев решения подобных задач. Однако установка разрабатываемой системы предполагается на БПЛА, который может совершать поступательное и вращательное движения. Поступательное движение носителя СВС практически не влияет на угловую траекторию объекта относительно системы сопровождения при больших расстояниях между объектом и носителем. Вращательное же движение носителя, вызванное качкой, вибрацией или маневрами, изменяет угловые координаты объекта относительно оптической оси ВД с большими скоростями и ускорениями. Так как в реальных условиях все механические транспортные средства подвержены качке, обусловленной воздействиями окружающей среды, на СВС могут накладываться жесткие требования к отработке быстроменяющихся угловых координат сопровождаемых объектов.
Кроме больших угловых скоростей и ускорений изменения направления на объект качка носителя приводит при использовании двухосного кардана к вращению ВД вокруг оптической оси и вращению изображения фоновой обстановки в последовательности обрабатываемых видеокадров. Вращение изображения существенно затрудняет решение задачи обнаружения и вычисления координат объекта, и требует оценки и компенсации вращения путем обработки изображения методами, требующими большого количества вычислений. Это приводит к увеличению времени запаздывания выдачи координат объекта в контур управления, что в свою очередь отрицательно сказывается на точности сопровождения.
Использование трехосного карданного подвеса в СВС, установленной на подвижном носителе, при наличии информации о текущих углах качки носителя дает возможность практически исключить указанные вращения изображения. Это позволяет с большей точностью и за меньшее время вычислять координаты сопровождаемого объекта, чем по повернутому изображению. Общая схема трехосного гироскопа представлена на рис. 2.
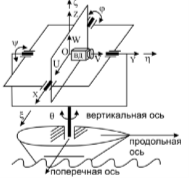
Рис. 2. СВС с трехосным карданным подвесом
Выбор типа оптической системы (зеркальная, линзовая или комбинированная зеркально-линзовая) определяется потребной величиной поля зрения. В зависимости от способа стабилизации линии визирования можно рассматривать 2 типа оптических схем:
прокачивающаяся стабилизированная оптическая система, рис. 3;
неподвижная относительно носителя приёмная оптическая система со стабилизацией поля зрения плоским зеркалом, размещенным на половине фокусного расстояния, рис. 4.
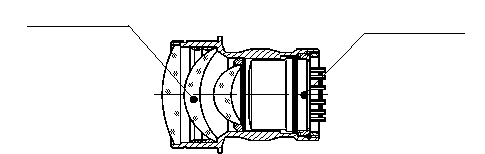
Рис. 3. Прокачивающаяся стабилизированная оптическая система
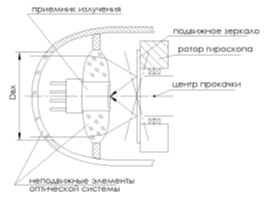
Рис. 4. Оптическая система со стабилизацией поля зрения плоским зеркалом
Основной недостаток прокачивающейся оптической системы — ограничения по диаметру входного зрачка Dвх. В тоже время, выполнение приёмной оптической системы в виде единой сборки упрощает юстировку, обеспечивает стабильность и качество изображения на углах пеленга.
Другим принципиальным вопросом проектирования оптического координатора является место размещения приёмника излучения: вместе с объективом или жестко закрепленный на корпусе гирокоординатора, рис. 5.
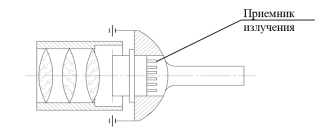
Рис. 5. Приёмник излучения, жестко закрепленный на корпусе гирокоординатора
Жестко связанный с объективом прокачивающийся приемник излучения обеспечивает простоту юстировки и стабильность характеристик в диапазоне рабочих температур и при действии вибраций. Основной недостаток этой схемы — необходимость прокачки соединительных проводов, что приводит к появлению момента тяжения, вызывающего уход гироскопа и, как следствие, к увеличению погрешности измерения угловой скорости. В системе с неподвижным приёмником излучения, усложняется сборка приёмной оптической системы, требующая, ещё и точного совмещения плоскости чувствительных элементов приёмника излучения с центром прокачки карданова подвеса гироскопа.
Анализ и выбор оптимального варианта проводился сравнительным многофакторным анализом по методике бенчмаркинга с помощью метода линейной свертки. В качестве альтернативных вариантов рассматривались следующие типы:
прокачивающаяся стабилизированную оптическую систему с приемником, скреплённым с объективом (альтернатива 1);
прокачивающаяся стабилизированную оптическую систему с приемником, скреплённым с гирокоординатором (альтернатива 2);
неподвижная относительно носителя приёмная оптическая система со стабилизацией поля зрения плоским зеркалом (альтернатива 3).
В качестве ключевых характеристик для оценивания были выбраны следующие:
- Масса
- Простота сборки и изготовления
- Энергопотребление
- Точность выделения координат цели
- Экономичность
Экспертным методом была определена весовая шкала для ключевых характеристик. Результаты приведены в таблице 1.
Таблица 1
Весовая шкала для ключевых характеристик
|
Ключевая характеристика |
Вес критерия |
|
Масса |
9 |
|
Простота сборки и изготовления |
6 |
|
Поле зрения |
10 |
|
Энергопотребление |
7 |
|
Точность выделения координат цели |
7 |
|
Экономичность |
4 |
Оценка альтернативных вариантов (по 10-балльной шкале) и расчет суммарных значений представлены в таблице 2.
Таблица 2
|
Ключевая характеристика |
Альтернативные варианты |
Вес критерия |
||
|
№ 1 |
№ 2 |
№ 3 |
||
|
Масса |
7 |
7 |
8 |
9 |
|
Простота сборки и изготовления |
9 |
6 |
6 |
6 |
|
Поле зрения |
8 |
8 |
10 |
10 |
|
Энергопотребление |
5 |
6 |
10 |
7 |
|
Точность выделения координат цели |
5 |
8 |
7 |
7 |
|
Экономичность |
7 |
5 |
7 |
4 |
|
Интегральная характеристика |
215 |
217 |
255 |
|
В результате анализа выявлено, что неподвижная относительно носителя приёмная оптическая система со стабилизацией поля зрения плоским зеркалом (альтернатива № 3) в наибольшей степени соответствует требованиям для разрабатываемого разведывательно-ударного беспилотного летательного аппарата.
Литература:
- Алпатов Б. А., Бабаян П. В. Методы обработки н анализа изображений в бортовых системах обнаружения и сопровождения объектов. Цифровая обработка сигналов. 2006, № 2, с. 45–51.
- Балашов О. Е. Повышение точности сопровождения объектов в системе видеослежения // Вестник Рязанского государственного радиотехнического университета. Вып. 18. Рязань, 2006.
- Государственный научный центр Российской Федерации ЦНИИ «Электроприбор». Оптические гироскопы / Ю. В. Филатов — Санкт-Петербург 2005, 139 с.
- Компьютерное зрение. Современный подход.: Пер. с англ. — М.: Издательский дом «Вильяме», 2004. — 928 с.: ил. — Парал. тит. англ.
- Методы автоматического обнаружения и сопровождения объектов. Обработка изображений и управление /Б. А. Алпатов, П. В. Бабаян, О. Е. Балашов, А. И. Степашкин. — М.: Радиотехника, 2008. — 176 е
- Форсайт Д., Понс Ж. Компьютерное зрение. Современный подход. — М.: Издательский дом «Вильяме», 2004.
- Цифровая обработка изображений Издание 3-е, исправленное и дополненное/ Гонсалес Р., Вудс P.
- Цифровые методы обработки и распознавания бинарных изображений./ Фурман Я. А., Юрьев А. Н., Яншин В. В. — Красноярск: Изд-во Красноярского университета, 1992.—248 с.
