





Производство рабочего пара на АЭС осуществляется или в ядерных реакторах (одноконтурные реакторы), или в специальных теплообменных установках (парогенератор в двухконтурных схемах). В статье рассматривается парогенератор ПГВ-1000, предназначенный для выработки насыщенного пара давлением 64 кгс/см2 с влажностью 0,2 % при температуре питательной воды составляет 220 ± 4 °С) в составе энергоблока АЭС с водо-водяным энергетическим реактором ВВЭР-1000.
Регулирование уровня в парогенераторе (ПГ) сводится к поддержанию материального баланса между отводом пара и подводом питательной воды. Параметром, характеризующим материальный баланс, является уровень воды в парогенераторе. К стабилизации уровня предъявляются довольно жесткие требования. Для ПГ с ВВЭР-1000 номинальный уровень составляет 2450 мм от внутренней образующего корпуса. Точность поддержания уровня в статических режимах составляет ±50 мм от номинального уровня, в динамике ±150 мм от номинального уровня (с учетом нечувствительности регулятора). Повышение уровня воды от номинального уровня не допускается из-за затопления и нарушения работы сепарационных устройств (заброс воды в турбину), а снижение уровня из-за оголения поверхности нагрева.
Возмущающими воздействиями на уровень воды ПГ являются:
а) расход пара (нагрузка);
б) изменение расхода питательной воды;
в) изменение температуры питательной воды;
г) изменение расхода продувки;
д) изменение теплоотвода со стороны первого контура (изменение средней температуры первого контура или отклонение ГЦН).
При возмущении расходом пара (нагрузка) или отключении ГЦН (изменение теплоподвода) проявляется явно выраженное ‹‹набухание›› уровня, т. е. изменение его в начальные моменты времени в сторону, не соответствующую знаку возмущающего воздействия. Поэтому в системах регулирования уровня, уровень поддерживается изменениям подачи питательной воды. В стационарных режимах подача питательной воды равно расходу пара на турбину. Динамические свойства парогенератора являются неблагоприятным с точки зрения стабилизации уровня, поэтому для поддержания уровня воды непригодны обычные одноимпульсные схемы.
На рис. 1 изображена трехимпульсная схема регулирования уровня воды.
В данной схеме исполнительный механизм питательного клапана управляется регулятором, на вход которого подаются сигналы по уровню, расходу пара и расходу воды.
Использование трехимпульсной САР уровня воды в ПГ с ПИ-регулятором позволяет с импульсами по расходу питательной воды и пара регулировать объект с эффектом «набухания».
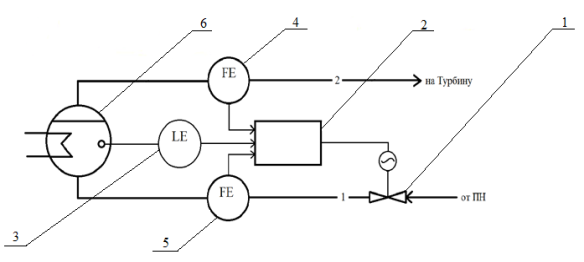
Рис. 1. Трехимпульсная схема регулирования уровня воды: 1 — исполнительный механизм питательного клапана; 2 — регулятор; 3 — сигнализатор по уровню; 4 — сигнализатор по расходу пара; 5 — сигнализатор по расходу воды; 6 — парогенератор
Таким образом, возможно подавление скачкообразных возмущений расходом пара величиной до 18 кг/с без выхода уровня из пятидесяти миллиметровой зоны. При всем этом получаем апериодический переходный процесс регулирования. На основании схемы рисунка 1 разработана функциональная схема САР уровня, представленная на рис. 2.
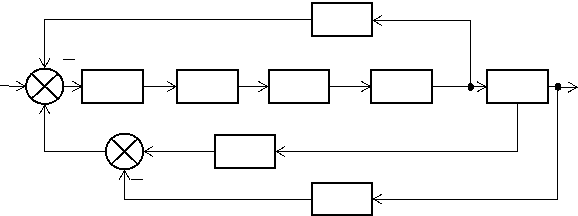
Рис. 2. Функциональная схема регулирования уровня воды в парогенераторе: Р — регулятор; ИМ — исполнительный механизм; РО — регулирующий орган; ТП — трубопровод; ПГ — парогенератор; ДРП — датчик расхода пара; ДУ — датчик уровня; ДРВ — датчик расхода воды
Передаточная функция парогенератора описывается как сумма трех параллельно соединенных блоков, учитывающих динамические свойства парогенератора [1]. С учетом рассчитанных численных значений параметров передаточных функций элементов САР, построены модели системы в Simulink, представленные на рис. 3.
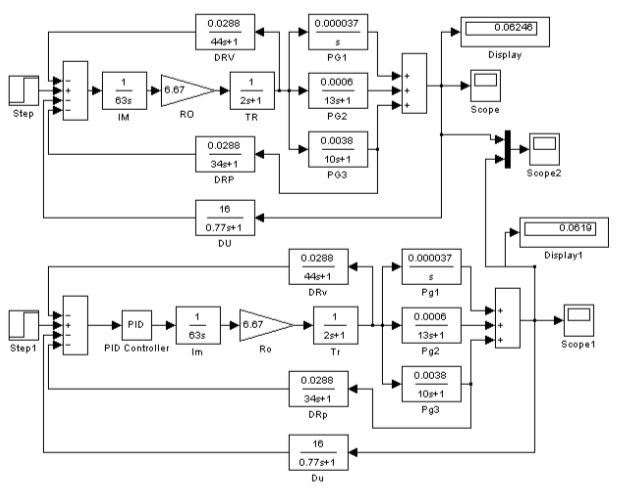
Рис. 3. Модели трехимпульсной САР уровня воды в парогенераторе
Параметры ПИ-регуляторы рассчитаны при помощи инструментального пакета NonlinearControlDesignBlockset (NCD-Blockset), который предоставляет в распоряжение пользователя графический интерфейс для настройки параметров динамических объектов, обеспечивающих желаемое качество переходных процессов. Задание динамических ограничений осуществляется в визуальном режиме (рис. 4). Основным требованием является увеличение быстродействия системы, вследствие чего требуемое время регулирования задано 200 с. Значения пропорциональной составляющей 2,0019, интегральной -0,0016.
Результаты моделирования моделей САР без регулятора (кривая 1) и с регулятором (кривая 2) представлены на рис.5.
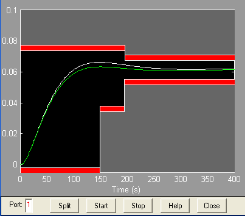
Рис. 4. Измененная фигура ограничений для переходного процесса САР
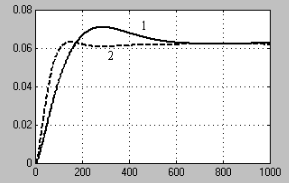
Рис. 5. Графики переходных процессов САР уровня воды в парогенераторе
В результате использования рассчитанного ПИ-регулятора время регулирования с 600 с уменьшилось до 200 с.
Литература:
- Демченко В. А. Автоматизация и моделирование технологических процессов АЭС и ТЭС / В. А. Демченко. — Одесса: Астропринт, 2001. — 395с.
