





В этой работе мы рассмотрим алгоритм координации для системы, в которой модели элементов задаются дифференциальными уравнениями.
Приведенный алгоритм, основанный на теории двойственности, является одним из простейших алгоритмов координации в динамических системах. Более сложные и совершенные алгоритмы приведены в работе [2].
Пусть система состоит из N взаимосвязанных подсистем, каждая из которых описывается системой линейных дифференциальных уравнений:
 (1)
(1)
Здесь ![]() вектор выходов
вектор выходов ![]() го элемента,
го элемента, ![]() -вектор уравнений
-вектор уравнений ![]() - го элемента,
- го элемента, ![]() вектор входов
вектор входов ![]() го элемента,
го элемента, ![]() матрицы с постоянными коэффициентами.
матрицы с постоянными коэффициентами.
Предполагается, что вектор входов ![]() является линейной комбинацией выходов других подсистем:
является линейной комбинацией выходов других подсистем:
 (2)
(2)
Заметим, что в (2) не исключается возможность того, что ![]() , т.е не исключаем возможности обратной связи в подсистемах.
, т.е не исключаем возможности обратной связи в подсистемах.
Если уравнения взаимосвязи ![]() подставить в (1), то можно получить стандартную форму
подставить в (1), то можно получить стандартную форму
Где А и В — полные матрицы системы.
Глобальная целевая функция имеет вид
 (4)
(4)
Где ![]() положительно определенные матрицы,
положительно определенные матрицы, ![]() строго положительно определенные матрицы,
строго положительно определенные матрицы, ![]() локальная целевая функция
локальная целевая функция ![]() го элемента:
го элемента:

Член ![]() под интегралом в (4) вводится для того, чтобы исключить вырожденные случаи.
под интегралом в (4) вводится для того, чтобы исключить вырожденные случаи.
Рассмотрим приведенный в (2) алгоритм, осуществляющий двухуровневую процедуру решения задачи. Алгоритм основан на модификации целей элементов путем введения штрафов за невыполнение ограничений (2).
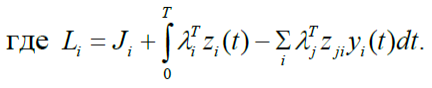
Введем двойственную функцию ![]() при соблюдении ограничений (1); где L- лагранжиан, определяемый формулой
при соблюдении ограничений (1); где L- лагранжиан, определяемый формулой

![]() вектор множителей Лагранжа.
вектор множителей Лагранжа.
Для заданного значения вектора множителей Лагранжа
![]()
Таким образом, для заданного ![]() =
= ![]() оказывается возможным максимизировать подлагранжианы
оказывается возможным максимизировать подлагранжианы ![]() независимо для каждого элемента. Поэтому значение двойственного функционала
независимо для каждого элемента. Поэтому значение двойственного функционала ![]() определяется путем независимого решения N локальных задач вида
определяется путем независимого решения N локальных задач вида
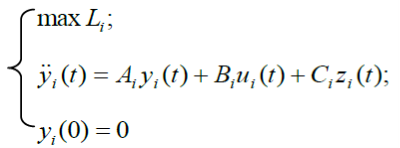
Известно [2], что для рассматриваемой задачи выполняется равенство
Таким образом, задача сводится к минимизации двойственного функционала по ![]() . Это можно осуществить в соответствии с двухуровневой структурой, когда на нижнем уровне при фиксированном значении
. Это можно осуществить в соответствии с двухуровневой структурой, когда на нижнем уровне при фиксированном значении ![]() решаются независимо N локальных задач а на верхнем уровне решается задача выбора оптимального значения вектора
решаются независимо N локальных задач а на верхнем уровне решается задача выбора оптимального значения вектора ![]() .
.
Механизм последовательного улучшения значений функции F(![]() ) основан на том факте, что оказывается возможным вычислить простое выражение для градиента F(
) основан на том факте, что оказывается возможным вычислить простое выражение для градиента F(![]() ) в терминах решений, получаемых при решении задач локальной максимизации.
) в терминах решений, получаемых при решении задач локальной максимизации.
Градиент задается ошибкой между прогнозным и фактическим значением входов подсистем, т. е.

Этот вектор ошибок используется в градиентной процедуре для формирования нового значения вектора .
Последовательное изменение вектора происходит по формулам
![]()
где к означает номер итерации; ![]() длина шага;
длина шага; ![]() направление.
направление.
Если используется метод наискорейшего спуска, то ![]() ; если используется метод сопряженных градиентов то
; если используется метод сопряженных градиентов то
![]()
Процедура заканчивается, когда ![]() ,
,![]() достаточно близко к нулю.
достаточно близко к нулю.
Литература:
- Алиев Р.А, Либерзон М. Н. Об одном подходе к координации в двухуровневых нечетких системах. Рига: Риж. политех. Ин-т.1983.
- Singh M. G. Dynamical Hierarchical Contol -Amsterdam North-Holland, 1977.-
