





Ключевые слова: робот-шахтер, работа в шахте, сбор проб, определение состава газов, газоанализатор, камера, манипулятор, независимая подвеска.
Роботы постепенно занимают все больше и больше места в нашей жизни и уже стали неотъемлемой частью человеческой повседневности. Они помогают человеку во всех отраслях его жизни, начиная от домашних дел и заканчивая помощью на производстве. Это касается не только высокотехнологичных отраслей, в которых робот с успехом заменяет человека благодаря необходимой точности позиционирования, но и вредных и опасных для человеческого здоровья производств, в частности работа в шахтах. Работа в шахтах всегда опасна для жизни, поэтому, чтобы обезопасить её, необходимо внедрить роботов. Именно по этой причине мы решили разработать робота-шахтера. Он будет выполнять необходимые операции вместо людей, что существенно обезопасит человека от происшествий, происходящих в шахтах.
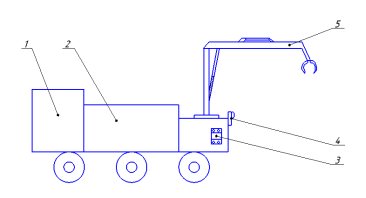
Рис. 1. Основные части конструкции робота:1 — блок управления и емкость для аккумуляторов; 2 — кузов для сбора образцов; 3 — камера для наблюдения положения руки 4 — газоанализатор; 5 — рука для сбора образцов
Основной частью робота-шахтера будет являться платформа. На платформе будет находиться блок управления, емкость для аккумуляторов и кузов для сбора образцов. Также на платформе будет навесное оборудование, позволяющее выполнять требуемые операции. Питание платформы осуществляется от серийных промышленных свинцово-кислотных аккумуляторов, которые можно легко и недорого заменить.
Учитывая назначение и сферу деятельности робота, мы пришли к выводу, что оптимальным вариантом будет колесное шасси с независимой подвеской: шесть колес с независимой подвеской легко преодолевают сложные препятствия и обеспечивают превосходную устойчивость даже на высоких скоростях. Подвеска справляется с пересеченной местностью, обеспечивая стабильность платформы для более точного сбора данных. Она также проста в техническом обслуживании.
Механическая рука, оснащенная камерой и специальным рабочим органом, будет крепиться к платформе. Механическая рука позволит сделать захват какого-либо предмета, например камня. Именно посредством этой руки будет осуществляться сбор проб в шахтах. Рука приводится в движение гидроцилиндрами под управлением контроллера. Камера на механической руке служит для проверки работоспособности робота, а также для управления роботом посредством человека [2].
Газоанализатор — это измерительный прибор для определения качественного и количественного состава смесей газов. Газоанализатор предназначен для эксплуатации в средах с содержанием механических примесей (пыли, смол, масел) и агрессивных веществ (хлора, серы, фосфора, фтора, мышьяка, сурьмы и их соединений). Газоанализатор позволит определить состав смеси газов и сделать вывод о безопасности нахождения человека в том или ином месте шахты. В шахтах не редки случаи, когда в местах, где ходят люди, бывает утечка опасных газов. Робот-шахтер с помощью газоанализатора сможет отследить это место и предупредить человека об опасности [3,4].
Точность позиционирования захвата манипулятора.
Для повышения точности позиционирования захвата манипулятора в пространстве используем расчеты, связанные с планированием траектории движения роботов с обходом препятствий в изменяющейся среде.
Одним из фундаментальных требований, предъявляемых как к манипуляционным, так и к мобильным роботам, является способность планировать и выполнять целенаправленные движения в среде с препятствиями [1]. Проблему создания соответствующих алгоритмов можно решать на двух уровнях: верхнем — уровне планирования, и нижнем — уровне управления.
На уровне планирования задача формулируется следующим образом: определить путь данного объекта из начального положения в заданное целевое заранее известной среде, содержащей стационарные и движущиеся по известным законам препятствия. До недавнего времени задача решалась только для стационарных препятствий, и лишь в последнее время стали разрабатываться методы планирования движения роботов в присутствии движущихся препятствий. Исследования в основном сосредоточены на разработке так называемых «геометрических подходов», когда в явном виде конструируются ограничения, возникающие из-за препятствий, а затем с их учетом осуществляется поиск пути. Существенно, что в изменяющейся среде эти ограничения являются функциями времени.
На уровне управления решается задача перемещения робота по найденной траектории с выполнением таких требований, как точность, гладкость и др. Кроме того, этот уровень включает в себя модификацию траектории в реальном времени для локального обхода препятствий, которые оказались в непосредственной близости от робота и не были учтены при планировании траектории. В отличие от глобального планирования на верхнем уровне здесь используются более простые алгоритмы, обладающие высоким быстродействием, но ограниченными возможностями обхода препятствий. Например, может использоваться «метод потенциального поля», когда препятствиям приписывается потенциал отталкивания, а цели — потенциал притяжения: робот перемешается под действием соответствующих сил этого поля.
При разработке предложенного подхода основное внимание уделяется задаче планирования движения робота в известной среде с движущимися препятствиями. При решении аналогичной задачи в стационарной среде производится только поиск пути среди неподвижных препятствий, а скорость перемещения робота по найденному пути может быть произвольной, так как в любом случае столкновений с препятствиями не происходит. Эта задача называется проблемой планирования пути (ППП). Если же препятствия движутся, то важно не только найти путь в цель, но и определить функцию скорости на этом пути, так как при одних скоростях столкновения будут, а при других нет. При этом следует учитывать дополнительные физические ограничения, например ограничения по скорости движения робота. Проблема нахождения пути как функции времени названа проблемой планирования траектории (ППТ).
Предлагается производить декомпозицию этой проблемы следующим образом:
запланировать пути робота с учетом стационарных препятствий;
выбрать один из путей для достижения целевого положения;
запланировать скорость движения вдоль этого пути так, чтобы избежать столкновений с движущимися препятствиями.
Как видно, первая часть алгоритма является решением ППП, а вторая названа проблемой планирования скорости (ППС).
Основное достоинство декомпозиции состоит в снижении сложности проблемы путем снижения размерности пространства поиска в сочетании с эффективностью решения задачи. Однако возможны случаи, когда метод декомпозиции не позволяет решить задачу, тогда можно использовать либо локальный обход препятствия, либо, выбрав на этапе ППП другой путь, заново запланировать скорость вдоль него.
В двумерной среде с многоугольными препятствиями для решения ППП используется стандартный метод на основе графа видимости (V — графа). Граф видимости VG(N,E) имеет множество вершин N={I,F} UV где I и F — соответственно начальное и целевое положения, а V — множество вершин многоугольных препятствий, и множество дуг Е, содержащее все отрезки прямых (![]() ), которые соединяют вершину
), которые соединяют вершину ![]() с вершиной
с вершиной ![]() , не пересекая препятствий. Оптимальным (кратчайшим) безопасным путем
, не пересекая препятствий. Оптимальным (кратчайшим) безопасным путем ![]() из I в F является путь минимальной стоимости на V — графе из вершины I в вершину F. Стоимость дуги определяется эвклидовой метрикой. V — граф показан на рис. 2.
из I в F является путь минимальной стоимости на V — графе из вершины I в вершину F. Стоимость дуги определяется эвклидовой метрикой. V — граф показан на рис. 2.
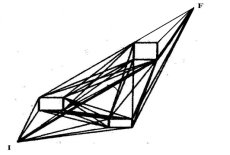
Рис. 2. Граф
Для решения ППС размерность пространства поиска увеличивается за счет введения дополнительной переменной — времени, и затем используется геометрический подход для поиска в этом пространстве, которое обозначается ![]() . Для конструирования пространства
. Для конструирования пространства ![]() требуется, чтобы путь в цель, найденный среди стационарных препятствий на этапе решения ППП, был представлен в виде параметризованной кривой
требуется, чтобы путь в цель, найденный среди стационарных препятствий на этапе решения ППП, был представлен в виде параметризованной кривой ![]() , где в качестве параметра
, где в качестве параметра ![]() может быть выбрана, например, текущая длина пути. Таким образом, пространство
может быть выбрана, например, текущая длина пути. Таким образом, пространство ![]() — двумерно. Движущиеся препятствия вызывают наличие изменяющихся во времени ограничений на пути робота, которые формируют запретные области в пространстве
— двумерно. Движущиеся препятствия вызывают наличие изменяющихся во времени ограничений на пути робота, которые формируют запретные области в пространстве ![]() . Например, пусть в двумерном случае путь робота задан в виде отрезка прямой, а препятствие
. Например, пусть в двумерном случае путь робота задан в виде отрезка прямой, а препятствие![]() в форме круга диаметра
в форме круга диаметра ![]() ‚движется с постоянной скоростью перпендикулярно этому пути [5].
‚движется с постоянной скоростью перпендикулярно этому пути [5].
Пусть ![]() — момент времени, когда это препятствие подходит к отрезку и касается его, а
— момент времени, когда это препятствие подходит к отрезку и касается его, а ![]() — момент его отхода от отрезка (рис. 3). Максимальный участок отрезка пути
— момент его отхода от отрезка (рис. 3). Максимальный участок отрезка пути ![]() , занятый препятствием в течение всего интервала
, занятый препятствием в течение всего интервала ![]() , равен
, равен ![]() . В качестве аппроксимации запретной области в пространстве
. В качестве аппроксимации запретной области в пространстве ![]() можно рассматривать прямоугольник со сторонами
можно рассматривать прямоугольник со сторонами ![]() и
и ![]() , в то время как сама запретная область является эллипсом, вписанным в этот прямоугольник.
, в то время как сама запретная область является эллипсом, вписанным в этот прямоугольник.
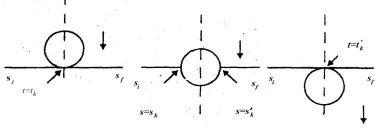
Рис. 3.
Если на этапе планирования скорости препятствий были заданы точно, то полученная траектория является сглаженной версией номинальной траектории. Если скорости движения препятствий отличаются от заданных, то и траектория отличается от номинальной [6].
В заключение можно сказать, что проект «Робот-шахтер» мы представляем себе именно таким. Может, с помощью данного робота, мы не добьемся поставленных задач, ввиду не очень хорошего выбора составных частей робота, но мы надеемся, что при улучшении нашего проекта можно будет использовать данного робота в шахтах. Мы постарались спроектировать робота, который смог бы помочь человеку в опасной профессии шахтера и обезопасить работу в шахтах.
Литература:
- Поезжаева, Е. В. Теория механизмов и механика машин. Промышленные роботы: учеб. пособие: в 3 ч. / Е. В. Поезжаева. — Пермь: Изд-во Перм. Гос. тех. ун-та, 2009. — Ч.2. — 185 с.
- Поезжаева, Е. В. Теория механизмов и механика машин. Промышленные роботы: учеб. пособие: в 3 ч. / Е. В. Поезжаева. — Пермь: Изд-во Перм. Гос. тех. ун-та, 2009. — Ч.3. — 164 с.
- Зенкевич С. Л. Основы управления манипуляционными роботами/С. Л. Зенкевич, А. С. Ющенко. — М.: Изд-во МГТУ им. Н. Э. Баумана, 2004. — 479 с.
- Федотов А. Г., Поезжаева Е. В., Заглядов П. В., Безопасность труда при взаимодействии с промышленными роботами//Экология и научно-технический прогресс. Урбанистика,2014,стр. 14–15.
- Сергеев А. А., Мисюров М. Н., Кычкин В. И., Виброакустическая диагностика технического состояния участков трамвайных путей в целях снижения неблагоприятных факторов//Экология и научно-технический прогресс. Урбанистика,2014,стр. 351–361.
- Поезжаева Е.В, Мисюров М. Н., Сергеев А. А. Роботизация шахтного дела // Интернет журнал «Науковеденье», 2015 № 3 (28) [Электронный ресурс]-М.:Науковедение, 2015 -.- Режим доступа: http://naukovedenie.ru/PDF/180TVN315.pdf, свободный. — Загл. с экрана. — Яз. рус., англ.
