





В настоящее время стоит вопрос о продаже качественных и годных лекарств в аптечных пунктах. В связи с этим разработан робот, позволяющий определить срок годности, химический состав медикаментов и их соответствие ГОСТам.
Ключевые слова: робот, анализ химического состава, контроль качества
Все лекарства имеют ограниченный срок годности. А потому на практике нередко возникают ситуации, когда на складе фармацевтического предприятия, аптеки или больницы оказываются нереализованные или неиспользованные лекарства, срок годности которых истек. Такие лекарства нельзя продавать или использовать — их нужно списать и уничтожить. Нередки случаи, когда лекарства с истекшим сроком годности попадают в розничную продажу через аптечные пункты ввиду того, что предприниматели или организации, имеющие лицензию на фармацевтическую деятельность, не желают нести убытки путем уничтожения недоброкачественных лекарственных средств, что противоречит п.1 ст.31 закона № 86-ФЗ.
Решим данную проблему определением срока годности, химического состава медикаментов и их соответствием ГОСТам. Для этого используем робота, который будет проверять товар на годность. Если данное лекарство проходит эту проверку, то он переходит к определению химического состава и сверке его с собственной базой данных государственных стандартов для лекарственных средств. Если лекарственный препарат просрочен или его состав не соответствует ГОСТу, то его упаковка подлежит повреждению с целью предотвращения реализации [1].
Аналогом робота будет служить летающий робот-пчела фирмы Monsanto, уникальность нашей разработки в том, что она будет оснащена устройством-сканером между передними и средними парами лапок, использующим луч близкий к инфракрасному диапазону, который позволяет определить состав медикаментов без физического контакта с ними. Пара передних лапок пчелы будут представлены в виде толстых игл с целью повреждения упаковки, средние и задние пары лапок — схватами для взятия коробок.

Рис. 1. Прототип проектируемого робота – Робот-пчела
Схват содержит два зажима (Рис.2), которые могут поворачиваться вокруг стационарной оси. Концы зажимов шарнирно соединены со звеньями, связанными друг с другом осью 1, которая перемещается приводом, подвешенным на оси 2. Нижний зажим соединен стержнем с тормозом. В процессе работы схват перемещается до тех пор, пока зажимаемая деталь не окажется на нижнем зажиме. После этого включается тормоз и привод. В результате одновременного включения тормоза и привода нижний зажим будет неподвижен, а верхний зажим будет опускаться вниз до полного захвата детали, при этом привод немного отклонится вверх относительно горизонтальной оси (рисунок).
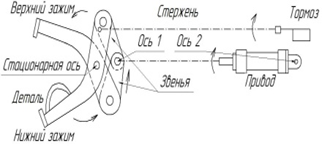
Рис. 2. Схват для взятия коробок
Так же робот будет оснащен системой технического зрения, расположенной на месте глаз пчелы, для распознавания объектов и определения их положения и ориентации в пространстве. Данная задача будет решена зрительной системой ДКНО (движущаяся камера, неподвижные объекты).
Предполагается, что: в базе данных имеются модели объектов; имеется процесс распознавания объектов, позволяющий идентифицировать объект и определить его положение и ориентацию (если это возможно); имеется возможность поворота и самостоятельного изменения положения робота, т. е. придание ему любой требуемой пространственной ориентации.
Если предыдущий анализ изображения не дал достаточной информации, то необходимо определить ориентацию объекта, используя несколько его видов. В данном подходе эта задача решается путем последовательного определения положения и ориентации камеры с использованием моделей объектов.
Рассматривается класс полуразрешимых объектов. Предполагается, что процесс распознавания объектов возвращает в качестве результата своей работы набор типов объектов, которые не противоречат тем видам, которые были получены до текущего момента, и диапазоны положений и ориентаций для каждого типа. При этом допускается наличие препятствий. В одном частном случае будем предполагать, что тип объекта и его положение известны, а требуется определить его ориентацию. В этом случае вначале по модели отыскиваются те участки поверхностей объекта, которые содержат информативные признаки. После этого рассчитываются положение и ориентация камеры, при которых эти признаки будут видны. При этом с получением каждого нового вида неопределенность будет уменьшаться и возможно не придется перебирать все типы из набора. В связи с тем, что количество попыток может зависеть от порядка перебора, а также от выбранных точек наблюдения, желательно, чтобы процесс распознавания объектов давал оценки достоверности для полученных типов объектов.
Когда тип (или множество возможных типов) объекта известен, а ориентация полностью не известна, приходится применять слепой поиск. При этом в качестве первой дополнительной точки наблюдения полезно взять точку, противоположную текущему положению камеры. При этом необходимо рассмотреть два случая: а) признак находится на стороне объекта, скрытой для данной точки наблюдения; б) признак находится на видимой стороне, но закрыт препятствиями. Случай (а) также может включать в себя загораживающие объекты, которые для наблюдателя расположены за анализируемым объектом. В случае (б) можно сравнить размер изображения загораживающего объекта с размером признака, найденным по модели в перспективной проекции с использованием известного расстояния. Если последний оказывается больше, то данная особенность не может быть на видимой стороне объекта [2].
Таким образом, данная проблема решается роботом, для которого разработан схват, обеспечивающий проверку качества медикаментов на складах фармацевтических предприятий и аптеках.
Литература:
- Поезжаева Е.В// Промышленные роботы: учеб. пособие: в 3 ч. / Е. В. Поезжаева. — Пермь: Изд-во Перм. Гос. техн. ун-та, 2009.-Ч.2.-185.
- Поезжаева Е. В., Поликарпова К. Н., Роботизация для обеспечения комфорта в промышленных и бытовых помещениях // Молодой ученый. — 2015. — № 14 (94). — С. 179–181.
