





В статье показаны способы проведения диагностики и ремонта труднодоступных мест производственных помещений, используя математическую модель.
Ключевые слова: робот, управление, ориентация.
Многие роботы, созданные для оказания помощи человеку при наведении порядка в «Умных» домах, скрывают в себе огромный потенциал, позволяющий использовать их для наведения порядка и чистоты в жилых и производственных помещениях. Автоматическим устройством, обеспечивающим передвижение, является шагающий робот. Большинство из них имеет адаптивное программное управление, в котором программа задается либо в форме готовых приводов для траектории каждой из координат манипуляционной системы, либо в виде траекторий в координатах рабочей зоны, которые затем преобразуются в реальном режиме времени в координаты степеней подвижности манипуляционной системы робота (Рис.1). Большинство исследований, связанных с управлением движением шагающих аппаратов, основано на предположении об абсолютной недеформируемости опорной поверхности.

Рис. 1. Шагающий робот
Однако в реальных условиях при перемещении аппарата по поверхности в результате её уплотнения под действием веса аппарата происходит изменение положения центра тяжести и пространственной ориентации корпуса шагающего аппарата [1]. При управлении аппаратом эти погрешности должны быть скорректированы. Рассматривается алгоритм управления движением шагающего аппарата по поверхности, использующий информацию от силовых сенсоров, установленных в каждой ступне аппарата. Свойства опорной поверхности достаточно хорошо описываются моделью ![]() (1), где δ — коэффициент деформации; F — сила, действующая на поверхность со стороны ступни; k и n — константы, определяемые экспериментально. Если сила возрастает от 0 до F0, то δ подчиняется уравнению (1) (см. рис. 2а). Поскольку упругость реальных поверхностей обычно весьма мала, в дальнейшем рассматривается пластическая модель (в этом случае взаимосвязь силы F и коэффициента деформации δ при разгрузке ступни представляется на рис.1б штрихпунктирной линией). Таким образом, приняты следующие допущения об окружающей среде и собственно шагающем аппарате. 1. Проседание δ не превышает длины ноги (δ < l). 2. Сила давления ступни F и коэффициент деформации δ связаны соотношением (1). 3. Упругие деформации элементов конструкции полагаются пренебрежимо малыми.
(1), где δ — коэффициент деформации; F — сила, действующая на поверхность со стороны ступни; k и n — константы, определяемые экспериментально. Если сила возрастает от 0 до F0, то δ подчиняется уравнению (1) (см. рис. 2а). Поскольку упругость реальных поверхностей обычно весьма мала, в дальнейшем рассматривается пластическая модель (в этом случае взаимосвязь силы F и коэффициента деформации δ при разгрузке ступни представляется на рис.1б штрихпунктирной линией). Таким образом, приняты следующие допущения об окружающей среде и собственно шагающем аппарате. 1. Проседание δ не превышает длины ноги (δ < l). 2. Сила давления ступни F и коэффициент деформации δ связаны соотношением (1). 3. Упругие деформации элементов конструкции полагаются пренебрежимо малыми.
Упрощенное изображение шагающего аппарата и связанной с ним координатной системы показано (рис. 3) штриховой линией показано малое смещение корпуса в направлении оси y. Начало системы координат совпадает с центром тяжести корпуса аппарата [2].
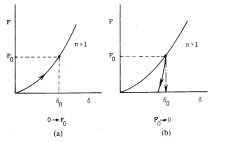
Рис. 2.Зависимость силы от деформации

Рис. 3. Координаты шагающего робота
Ниже рассматривается изменение опорных сил в двух фазах движения аппарата: в фазе смены опорных конечностей и в фазе перемещения корпуса. Используется предположение, что масса конечности значительно меньше массы корпуса аппарата. Алгоритм управления включает в себя две части: 1) формирует движение ступни; 2) осуществляет компенсацию в фазе перемещения корпуса аппарата. Блок-схема алгоритма управления включает: 1 — переносимая нога опускается; 2 — формирование модели опорной поверхности; 3 — движение переноса корпуса; 4, 5 — дополнительное условие (да, нет); 6 — следующий алгоритм. В фазе смены опорных конечностей управление силой осуществляется её регистрированием на ступне. В фазе перемещения корпуса аппарата опорная сила конечности изменяется. Для осуществления такой компенсации дополнительного проседания необходимо располагать моделью поверхности (1) с достаточно точным знанием её параметров использования.Предложенный алгоритм управления является разомкнутым по перемещению и ориентации и в связи с этим, как бы ни была мала погрешность на шаге, происходит накопление ошибки, для устранения которой требуется выполнение корректирующих движений с использованием сенсоров, регистрирующих высоту и пространственное положение аппарата. Коррекция высоты аппарата производится только в следующих случаях: когда расстояние между корпусом аппарата и опорной поверхностью становится меньше заданной величины (корпус поднимается на высоту ∆z); когда ступни конечностей не входят в контакт с опорной поверхностью в вытянутом состоянии (корпус опускается на высоту ∆z); при угрозе столкновения с препятствием корпус поднимается на высоту ∆z. Наклон корпуса аппарата уменьшает область статической устойчивости аппарата и приводит к нежелательному перераспределению опорных сил. Коррекция пространственной ориентации может производиться по сигналам специальных сенсоров, регистрирующих углы наклонов аппарата в разных направлениях, с использованием алгоритма управления (1). Накапливаемую ошибку пространственной ориентации аппарата можно корректировать без использования специальных сенсоров только на основании силовой обратной связи с восстановлением угла наклона [3].
Робот с дистанционным управлением предназначен для изучения обстановки, диагностики и ремонта труднодоступных участков жилых и производственных помещений. Он может быть использован для проведения работ в подвальном помещении. Робот управляется двумя операторами, один следит за передвижением, другой — за электрическими проводами. Он преодолевает любые препятствия и выполняет различную физическую работу [4].
Литература:
- Поезжаева Е. В. Промышленные роботы: учеб. пособие. в 3 ч. — М.: Изд-во УМО АМ МВТУ им. Баумана; изд-во ПГТУ, 2009
- Зенкевич С. Л. Управление роботами — М.: Изд-во МГТУ им. Н. Э. Баумана, 2000
- Поезжаева Е. В. Теория механизмов и механика систем машин: учебное пособие — М.: изд-во ПГТУ, 2015
- Поезжаева Е. В., Поликарпова К. Н., Роботизация для обеспечения комфорта в промышленныхи бытовых помещениях // Молодой ученый. — 2015. — № 14 (94). — С. 179–181.
