





Предложен алгоритм прогнозирующего управления с интегральной составляющей в контуре управления, который позволяет обеспечить астатизм системы и выполнения ограничений, накладываемые на переменные состояния, а также задающие воздействия. Полученный алгоритм реализован для синтеза цифровой системы управления угловой скоростью вращения вала электродвигателя постоянного тока.
Ключевые слова: алгоритм прогнозирования, функционал качества, синтез, ограничения, электропривод, оптимизация.
В работе рассматриваются вопросы синтеза система автоматического управление электромеханическим объектом на основе метода прогнозирующего управления. Метод прогнозирующего управления широко применяется на практике для решения задач синтеза систем автоматического управления, функционирующих в условиях жестких ограничений, накладываемых на переменные состояния и управления [1].
Следует, что метод прогнозирующего управления близок по своей сути к методу локально-оптимального управления [2] и методу оптимального управления с прогнозирующей моделью на основе обобщенного критерия [3].
В работе описывается алгоритм прогнозирующего управления с интегральной составляющей в контуре управления.
Пусть динамика цифровой системы управления описывается уравнениями:
![]() (1)
(1)
где ![]() —
— ![]() –мерный вектор состояния,
–мерный вектор состояния, ![]() -
-![]() -мерный вектор управления,
-мерный вектор управления, ![]() -
-![]() - мерный вектор выхода,
- мерный вектор выхода, ![]() -
-![]() -мерный вектор возмущений, А, B, C, D — матрицы соответствующих размеров. Области допустимых значений для переменных состояния и управления задаются неравенствами:
-мерный вектор возмущений, А, B, C, D — матрицы соответствующих размеров. Области допустимых значений для переменных состояния и управления задаются неравенствами:
где![]() — векторы соответствующих размеров. Необходимо построить управление в виде обратной связи, при котором
— векторы соответствующих размеров. Необходимо построить управление в виде обратной связи, при котором ![]() при
при ![]() , где
, где ![]() — желаемое значение выхода.
— желаемое значение выхода.
В стандартной схеме метода прогнозирующего управления в каждый момент времени ![]() решается задача оптимизации квадратичного функционала качества.
решается задача оптимизации квадратичного функционала качества.
![]() (2)
(2)
где ![]() — симметричная неотрицательно определенная,
— симметричная неотрицательно определенная, ![]() - симметричные положительно определенные весовые матрицы. Минимум функционала (2) находится с учетом ограничений:
- симметричные положительно определенные весовые матрицы. Минимум функционала (2) находится с учетом ограничений:
![]() ,
,
где ![]() - горизонт управления (натуральное число).
- горизонт управления (натуральное число).
Обозначив через ![]() ошибку слежения, получим вектор
ошибку слежения, получим вектор ![]() , удовлетворяющий уравнению:
, удовлетворяющий уравнению:
![]() .
.
Вектор ![]() имеет смысл интеграла от ошибки слежения. Известно [4–6], что решение задачи слежения за заданным значением выхода требует наличия интегральной составляющей в алгоритме управления. Прогнозирующее управление с вектором
имеет смысл интеграла от ошибки слежения. Известно [4–6], что решение задачи слежения за заданным значением выхода требует наличия интегральной составляющей в алгоритме управления. Прогнозирующее управление с вектором ![]() в контуре управления, строится следующим образом.
в контуре управления, строится следующим образом.
Заменив функционал качества (2) на функционал, содержащий интегральную составляющую, получим:
где ![]() - симметричная неотрицательно определенная матрица.
- симметричная неотрицательно определенная матрица.
Введем обозначения:
 ,
, 

 ,
,
 ,
,  ,
,  ,
,  ,
,
где
Из уравнений системы (1) следуют соотношения:
![]()
![]()
![]()
Тогда функционал качества (3) принимает вид:
 (4)
(4)
где ![]() ,
, ![]() и
и ![]() — блочно-диагональные матрицы с матрицами
— блочно-диагональные матрицы с матрицами ![]() ,
, ![]() и
и ![]() на диагонали. Ограничения на переменные состояния и управления записываются в виде:
на диагонали. Ограничения на переменные состояния и управления записываются в виде:
![]() . (5)
. (5)
![]() (6)
(6)
Таким образом, имеем задачу квадратично программирования относительно вектора неизвестных ![]() с целевой функцией (4) ограничениями (5), (6). С использованием матрицы Гессе целевой функции, которая имеет вид:
с целевой функцией (4) ограничениями (5), (6). С использованием матрицы Гессе целевой функции, которая имеет вид:![]()
Очевидно, что положительная ![]() гарантирует положительную определенность
гарантирует положительную определенность ![]() .
.
Задача (4)-(6) решается в каждый момент времени ![]() . Управление в момент времени
. Управление в момент времени ![]() полагается равным
полагается равным ![]() .
.
Полученный алгоритм реализован для решения задачи синтеза цифровой системы управления угловой скоростью вращения вала электродвигателя постоянного тока. Пусть динамика электродвигателя описывается уравнениями:
![]() (7)
(7)
![]() (8)
(8)
где ![]() - угловая скорость (рад/с);
- угловая скорость (рад/с); ![]() - сила тока (А);
- сила тока (А); ![]() - напряжение (В);
- напряжение (В); ![]() - момент внешних сил (Нм);
- момент внешних сил (Нм); ![]() - момент инерции вала двигателя (кг∙м2);
- момент инерции вала двигателя (кг∙м2); ![]() - индуктивность якорной цепи (Гн);
- индуктивность якорной цепи (Гн); ![]() - сопротивление якорной цепи (Ом);
- сопротивление якорной цепи (Ом); ![]() - конструктивные параметры двигателя.
- конструктивные параметры двигателя.
Пусть управление рассчитывается микропроцессором и формируется амплитудно-импульсным модулятором с шагом квантования по времени ![]() . Тогда модель дискретной системы принимает вид (1), где:
. Тогда модель дискретной системы принимает вид (1), где:
 .
.
Здесь ![]() — матрицы непрерывной системы, представленной в виде (7),(8).
— матрицы непрерывной системы, представленной в виде (7),(8).
 .
.
Система управления должна обеспечить выполнение условия
![]()
Расчеты проводились в системе MATLAB при следующих значениях параметров объектов управления: ![]() ,
, ![]()
![]()
![]()
![]() и алгоритма управления:
и алгоритма управления: ![]()
![]()
![]()
![]()
![]()
![]() . При решении задачи квадратичного программирования использовалась функция quadprog системы MATLAB.
. При решении задачи квадратичного программирования использовалась функция quadprog системы MATLAB.
На рис. 1, 2, 3 показаны переходные процессы по угловой скорости, силе тока и управлению полученные для ![]() и
и ![]() . На рис. 4 для сравнения представлены переходные процессы по угловой скорости для системы со стандартным прогнозирующим управлением (линия 1) и для системы с интегральной составляющей в алгоритме управления (линия 2) при
. На рис. 4 для сравнения представлены переходные процессы по угловой скорости для системы со стандартным прогнозирующим управлением (линия 1) и для системы с интегральной составляющей в алгоритме управления (линия 2) при ![]() . Из результатов моделирования видно, что алгоритм с интегральной составляющей по ошибке слежения обеспечивает астатизм системы в отличие от стандартного алгоритма прогнозирующего управления. Рисунки также наглядно показывают выполнение ограничений по угловой скорости, силе тока и напряжению на входе электродвигателя.
. Из результатов моделирования видно, что алгоритм с интегральной составляющей по ошибке слежения обеспечивает астатизм системы в отличие от стандартного алгоритма прогнозирующего управления. Рисунки также наглядно показывают выполнение ограничений по угловой скорости, силе тока и напряжению на входе электродвигателя.
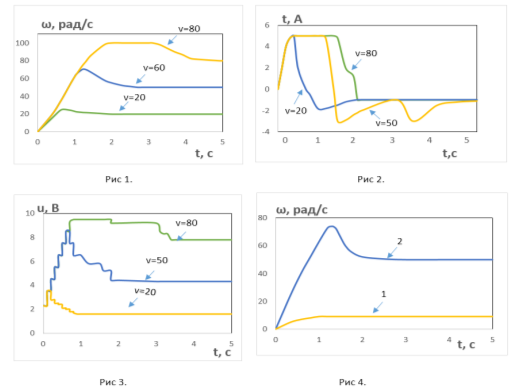
Рис. 1, 2, 3, 4. Графики переходных процессов
Литература:
- Clarke D. W. Application of generalized predictive control to industrial processes // IEEE Control Systems Magazine. Vol. 8. 1988 № 2. Р. 49–55.
- Смагин В. И., Параев Ю. И. Синтез следящих систем управления по квадратичным критериями Томск: Изд-во ТГУ. 1996. –171с.
- Красовский А. А., Буков В. И., Шендрик В. С. Универсальные алгоритмы оптимального управления непрерывными системами. М.: Наука. 1977. –272с.
- Пегат А. Нечеткое моделирование и управление. М.: Бином. Лаборатория знаний, 2009. –798с.
- Сиддиков И. Х., Измайлова Р. Н. Синтез цифрового алгоритма управления с прогнозирующей моделью // Химическая технология. Контроль и управление. Ташкент. 2010. № 2. –С. 72–76.
- Леоненков А. Ю. Нечеткое моделирование в среде Matlab и fuzzyTech. — СПб.: БХВ, 2003. –720с.
