





Важным аспектом интеллектуальной робототехнической системы является возможность ее работы в неопределенной среда. В представляемой ниже работе будет предпринята попытка решить проблему распознавания и захвата роботом деталей из навала.
Ключевые слова: роботехническая система, граф, сцена, модуль, навал.
В качестве датчиков будут использованы телекамера, расположенная над анализируемой сценой, а также простей сенсор, работающий в инфракрасном диапазоне. Детали двенадцати типов, причем их силуэты имели примерно равные площади и периметры (рис. 1). Данная система не использует трехмерную информацию, поэтому иногда для однозначного распознавания роботу необходимо будет «разгрести» навал, не допуская при этом выхода деталей из поля зрения.
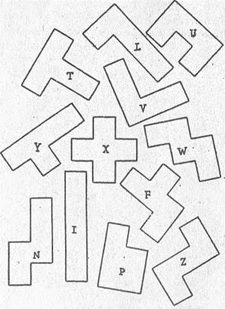
Рис. 1
В ранней версии системы данная задача решалась в семь стадий: распознавание перекрывающихся деталей; планирование доступа к изначально недоступным точкам захвата; планирование удаления деталей, лежащих на детали, которую нужно извлечь; планирование смещения деталей; планирование «разгребания» навала; перенос деталей и смещение деталей.
В описываемой более поздней версии системы управление имеет иерархическую структуру. Это позволяет оптимизировать процесс извлечения детали и, исправлять ошибки при отработке движения.
Разрабатываемая система будет иметь семь специализированных модулей, каждый из которых может работать в одном из двух режимов: в режиме интерпретации и режиме выполнения. Ниже подробно описывается работа каждого из этих модулей.
Анализ сцены. Задача этого модуля состоит в том, чтобы произвести анализ сцены и распознать все видимые детали. Сложность реализации этой процедуры зависит от расположения деталей на сцене: детали изолированы, соприкасаются или перекрываются. Система анализирует плоские изображения, поступающие от телекамеры, расположенной над сценой. Эталонные модели деталей вводятся в систему человеком в терминах параметров контура детали.
Процедура распознавания имеет два уровня и реализована в виде трех подмодулей. Первый уровень используется для идентификации изолированных деталей, частично закрытых деталей и скоплений деталей и служит в качестве предварительной классификации, результаты которой используются на более высоком уровне при интерпретации сцены. Этап предварительной классификации начинается с измерения -площади силуэта. Если измеренная величина оказывается равной площади изолированного объекта, то данный объект может быть распознан, в противном случае считается, что анализируемый силуэт соответствует навалу деталей или частично закрытому объекту. Выделенные объекты распознаются по набору признаков, описывающих их контуры.
Второй уровень включает в себя два подмодуля: один для распознавания частично скрытых объектов (тех, чьи площади оказались меньше площади изолированных объектов) и второй для распознавания объектов в навале. Первый подмодуль осуществляет сегментацию и распознавание закрывающих деталей. Сегментация основана на сравнении уровней яркости с порогом, выделении и сглаживании контура. Затем производится грубое сравнение выделенного контура с моделью путем расчета функции корреляции. Эго позволяет грубо определить ориентацию и положение объекта на плоскости. После этого производится точный поиск направления максимальной корреляции. На заключительном этапе рассчитывается мера близости анализируемого контура к моделям и выбирается модель, для которой это расстояние минимально.
При анализе навала процесс распознавания аналогичен. Здесь возможны два случая: 1) площадь анализируемого силуэта кратна площади изолированных деталей — это означает, что объекты соприкасаются и могут быть распознаны как изолированные; 2) площадь не кратна — детали в навале перекрываются. В обоих случаях требуется более тонкая процедура сегментации, позволяющая получить контурные линии внутри силуэта навала. Здесь для выделения контуров используется оператор Собела. При идентификации деталей в первом случае производится перебор всех моделей пока не будет найдена конфигурация, близкая к анализируемой. Здесь могут возникнуть неоднозначности (рис.2) и, если никаких дополнительных ограничений не используется, однозначного результата получить не удастся. Во втором случае производится поиск конфигурации моделей, наилучшим образом отвечающей наблюдаемой сцене, и в случае, если мера сходства окажется выше порога, детали считаются идентифицированными, хотя здесь неоднозначности возникают гораздо чаще, чем в первом случае. Во всех рассмотренных случаях может оказаться необходимой помощь робота для устранения неоднозначностей.
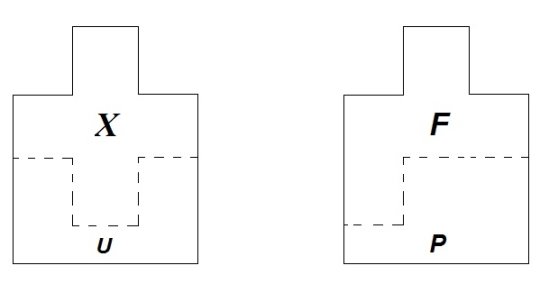
Рис. 2
Планирование смешения деталей. В тех случаях, когда нет возможности извлечь объект, так как на нем лежат другие детали, необходимо переместить эти детали на другое место. Известно несколько подходов к решению этой задачи, которые включают в себя планирование траекторий перемещения. Однако здесь предлагается более простой путь. Идея предлагаемого метода состоит в том, чтобы путем вращений и параллельных смещений переместить объект на свободное место, где его можно захватить. При планировании такого смешения можно выделить три этапа: 1) нахождение свободного пространства, куда нужно будет сместить объект; 2) отыскание точек объекта, куда нужно его толкать, и направления толкания; 3) определения требуемых операций для достижения найденного свободного места.
На первом этапе производится анализ изображения сцены, выделяются свободные зоны и определяется путь перемещения. Изображение преобразуется в граф, чьи узлы представляют свободные зоны, доступные для робота. В этих зонах можно будет осуществить захват детали. Дуги графа представляют пути, по которым деталь можно будет протолкнуть. Каждой дуге приписаны параметры: ширина и оценка риска для окружающей области. На этом графе выбирается траектория с минимальным риском.
На втором этапе производится расчет точек контакта и направления смещения детали. В целях уменьшения сложности расчетов во внимание принимаются только параллельные смещения (без вращения вокруг его центра тяжести). Точки и направления должны удовлетворять следующим условиям: вектор усилия должен проходить через центр тяжести объекта, а точка контакта должна находиться на плоской поверхности, перпендикулярной к направлению толкания. Поэтому при расчете направления толкания используется метод главных моментов инерции.
Наконец, на третьем этапе операции по перемещению планируются путем просмотра точек излома траектории перемещения.
Планирование захвата детали. Задача этого модуля состоит в определении последовательности захватов, приводящей к достижению поставленной цели. В зависимости от конкретной стратегии системы эта цель может состоять либо в извлечении определенной детали, чьи точки захвата скрыты, или в извлечении максимально возможного количества деталей. Кроме того, можно потребовать обеспечения оптимальности в том или ином смысле, например в терминах количества захватов, времени работы, суммарной длины траектории, надежности, стабильности, безопасности и пр.
При выполнении этой операции предполагается, что на сцене присутствуют некоторые распознанные детали (включая разыскиваемую деталь в случае, когда извлечь нужно ее одну). В основе данного модуля лежит логический граф с узлами типа «И« и «ИЛИ». Узлы «ИЛИ» соответствуют деталям, а узлы «И« связывают место захвата детали с деталями, которые делают это место недоступным.
Планирование «разгребания» навала. Этот модуль используется для разравнивания скоплений деталей с цепью обеспечения возможности их распознавания и захвата. Условием для применения этого модуля является наличие наклонных поверхностей на анализируемой сцене. Направление толкания является функцией координат центра масс и вторых моментов скопления, которое нужно разровнять, и наклонной поверхности наверху кучи. Кроме того, принимается во внимание положение скопления в поле зрения и площадь, занимаемая деталями вокруг кучи. В общем случае выбирается горизонтальное направление, перпендикулярное к оси минимального момента инерции наклонной детали. При этом вектор усилия должен проходить через центр тяжести кучи и быть направленным в сторону наименее загроможденного участка едены.
Вертикальная компонента движения определяется по данным датчика близости, установленного на схвате робота.
Планирование просмотра. Задача этого модуля состоит в том, чтобы гарантировать отсутствие незамеченных деталей, лежащих на распознанной детали и не изменяющих ее очертаний. Условием для применения этого модуля является наличие на сцене распознанных деталей и отсутствие наклонных поверхностей.
Работа данного модуля имеет две стадии. На первой из них область, покрытая деталью, сканируется датчиком близости. Если при этом оказывается обнаруженной скрытая деталь, осуществляется переход ко второй, стадии, на которой рассчитывается направление толкания с использованием тех же признаков и критериев, что и в модуле планирования «разгребания» навала.
Описываемую систему активного распознавания можно рассматривать как универсальную систему принятия решений в статической неопределенной среде. Задача системы состоит в том, чтобы наилучшим образом извлечь деталь, следуя конкретной стратегии, с использованием ограниченней сенсорной информации. Отличительной особенностью данной системы является иерархическая структура управления, при которой модули вызываются по мере необходимости, а не в жесткой последовательности, как в детерминированных системах.
Координирующую функцию выполняет специальный модуль — интерпретатор. Этот модуль состоит из двух частей: секции данных и секции принятия решения,
В секцию данных поступает информация от всех специализированных модулей, описанных выше. Она организована в виде семи разделов, в которые заносятся оценки уместности конкретного специализированного модуля в текущий момент, Условия применения данного модуля, прогнозы результата и побочных эффектов применения, затраты на применение, перспективные действия, которые можно предпринять на следующем этапе, тесты для проверки успешности операции и комментарии. [1–6]
На основе анализа информации, содержащейся в секции данных, интерпретатор выбирает наилучшее действие для выполнения на очередном этапе. При этом также используется информация о текущем состоянии и используемой стратегии. В настоящее время используются следующие стратегии: следовать фиксированной последовательности извлечения деталей; минимизировать затраты на извлечение и минимизировать риск.
Литература:
- Поезжаева Е. В. Промышленные роботы: учеб.пособие: в 3 ч./ Е. В. Поезжаева. — Пермь Изд-во Пермь.гос, тех. ун-та, 2006.- Ч.1.-64 с.
- Зенкевич С. Л., Ющенко А:.С. Управление роботами.- М.:Изд-во МГОУ им. Н. Э. Баумана, 2006.
- Корендясев А. И. Теоретические основы робототехники: в 2 кн./ А. И. Корендясев, Б. Л. Саламандра, Л. И. Тывес; отв. Ред. С. М. Каплунов.– М.:Наука,2006.
- Хорн Б. К. Зрение роботов.– М.:Мир,1989.
- Михайлов С. В., Романов В. В., Заикин Д. А., Система технического зрения для диагностики процесса резания материалов//Вестник компьютерных и информационных технологий.,2007,№ 4, стр. 23–26
- В. И. Сырямкин, B. C. Титов, Ю. Г. Якушенков,Системы, технического зрения-МГП «РАСКО»,1992
