





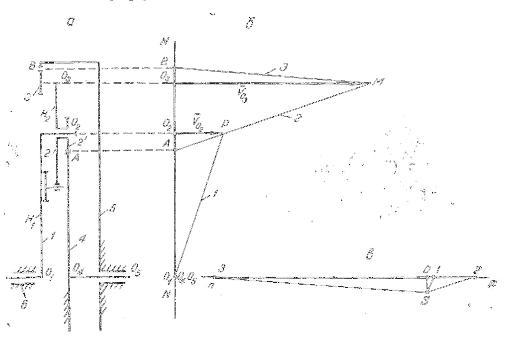
В настоящей работе рассмотрим структуру и кинематику планетарного механизма со ступенчатым сателлитом (рисунок, а), состоящего из следующих подвижных и неподвижных звеньев, а также кинематических пар (1): 1-водило, 2-сателлит-водило, 3-сателлит, 4,5-неподвижные центральные колеса, 6-стойка, три вращательные пары пятого класса
![]() ;
; ![]() ;
; ![]()
две кинематические пары четвертого класса
![]() ;
; ![]() .
.
Поскольку все звенья движутся в параллелных плоскостях, механизм считается плоским. Степень его подвижности определяется по известной структурной формуле П. Л. Чебышева (2).
![]() (1)
(1)
Где n=3 — число подвижных звеньев; ![]() или
или ![]() — число кинематических пар пятого и четвертого классов.
— число кинематических пар пятого и четвертого классов.
Подставив значения n, p5 и p4 в структурнуюформулу (1), получим W=1. Это значит, что для определения движения звеньев данного планетарного механизма необходимо задать движение одного звена, например, водила H1, являющего ведущим.
В работе (3) доказано, что структура планетарных механизмов с произвольной степенью подвижности может быть исследована по формуле
![]() . (2)
. (2)
где ![]() ,
, ![]() ,
, ![]() — количество самостоятельных водил, сателлитов, неподвижных звеньев, находящихся в зацеплении. Применительно к представленной кинематической схеме будем идеть kc.в=2, kc.с=1, kн.з=2, тогда
— количество самостоятельных водил, сателлитов, неподвижных звеньев, находящихся в зацеплении. Применительно к представленной кинематической схеме будем идеть kc.в=2, kc.с=1, kн.з=2, тогда ![]() .
.
Рассмотрим кинематику планетарного механизма со ступенчатым сателлитом (схему определения линейных и угловых скоростей характерных точек механизма см.на рисунке, б).
Угловые скорости ![]() и
и ![]() (см. рисунок, а) можно найти аналитически с учетом векторных свойств радиусов сопряжения (4):
(см. рисунок, а) можно найти аналитически с учетом векторных свойств радиусов сопряжения (4):
![]() ; (3)
; (3)
где ![]()
Тогда угловая скорость ![]() с учетом
с учетом ![]() будет иметь вид
будет иметь вид
![]() (4)
(4)
Скорости точки ![]() определимиз подобия треугольников Δ
определимиз подобия треугольников Δ![]() Δ
Δ![]() (см.рисунок, б):
(см.рисунок, б):
 , отсюда
, отсюда  (5)
(5)
 (6)
(6)
Тогда угловая скорость ![]() с учетом
с учетом ![]() вычислится по формуле
вычислится по формуле
![]()
![]() =
= (7)
(7)
Подставив значение (4) в (7), найдем общую формулу для определения угловой скорости сателлита

Литература:
- Усманходжаев Х. Х. Теория механизмов и машин. На узб.яз. — Ташкент: Фан УзССР, 1981.
- Артоболевский И. И. Теория механизмов. — М.: Наука, 1965.
- Файзиев И. Х. Структурный анализ и синтез планетарных механизмов с произвольной степенью подвижности. Вопросы кибернетики и вычислительной математики. — Ташкент: Фан, 1968. № 20 — С.96–103.
