





В статье рассмотрены возможные варианты практического использования радиолокационно-доплеровского канала обзора прилегающего пространства для автоматизации процессов, способствующих безопасному функционированию железнодорожного транспорта. Сформулированы технические требования к приемопередатчикам и вычислительным устройствам для реализации предложенных процессов.
Ключевые слова: радиолокационно-доплеровская обработка, обнаружение, технологическое препятствие, контроль, колебание, целостность.
Успешное применение радиолокации в системах контроля и управления, используемых в авиации и судовождении [1–3] предопределено рядом преимуществ радиолокационных систем, а именно: всепогодностью, возможностью автоматизации, автономностью. Использование методов радиолокации в обеспечении функционирования железнодорожного транспорта также имеет место, однако практически на железных дорогах РФ в основном ограничивается измерением скорости движения объектов [4–7]. Вариации с местом расположения приемопередатчиков, ориентацией приемопередающих антенн, методами обработки радиолокационных сигналов могут открыть ряд дополнительных возможностей в процессе получения необходимой информации, как о параметрах самого подвижного объекта, так и о параметрах его движения, а также в процесс автоматизации некоторых процессов.
К числу последних можно отнести автоматизацию следующих процессов:
- обнаружения технологических препятствий[1] [8] нормальному функционированию снегоочистительной техники для своевременного перевода рабочих органов[2] снегоуборочных единиц из рабочего в транспортное положение и исключения возможности их механического контакта с препятствиями, способного привести к повреждению последних;
- контроля поперечных пространственных перемещений кузова вагона в составе движущегося железнодорожного подвижного состава [9] для выявления вагонов подверженных интенсивным колебаниям, способным привести к сходу вагона подвижного состава с рельса;
- контроля целостности[3] железнодорожного подвижного состава для своевременного обнаружения нарушения целостности, что особенно актуально на участках, оборудованных полуавтоматической блокировкой, координатными системами интервального регулирования движения поездов.
Цель статьи: анализ практической применимости методов радиолокационного зондирования пространства для автоматизации процессов, способствующих повышению безопасности функционирования железнодорожного транспорта.
- Особенности отражений радиолокационных сигналов от различных радиолокационных объектов
Каждое из перечисленных направлений имеет свои характерные особенности измерения, поскольку отличается дальностью измерения, отражательными способностями облучаемых поверхностей, являющихся сложными распределенными целями, и прочими параметрами измерений (таблица 1).
Таблица 1
Особенности функционирования РЛС в зависимости от расположения приемопередающих антенн
|
|
Размещение приемопередающей антенны |
|
|
Локомотивное (верхняя часть локомотива) Процесс №1 |
Напольное (вблизи железнодорожного пути) Процессы №2, 3 |
|
|
Облучаемая поверхность |
Верхнее строение пути, элементы инфраструктуры |
Лобовая и боковая часть ПО, местные элементы |
|
Вид вторичного отражения ЭМК |
Диффузное, зеркальное, уголковое |
Зеркальное, уголковое (диффузное — для некоторых типов вагонов) |
|
Расстояние до отражающей поверхности, D, м |
<30 |
<100 |
Особенности радиолокационного зондирования пространства при разном расположении приемопередатчиков описаны в работе [10].
При излучении антенной передатчика радиолокационной системы импульсных электромагнитных колебаний (ЭМК) длительностью и с низкой частотой повторения[4]Fп на несущей частоте f0=:
uизл(t) = rect[Uизлsint], tи. (1)
Зондирующие импульсы ЭМК (1), встречая на пути распространения отражающие объекты (цели), последними отражаются. Часть энергии отраженных ЭМК распространяется в направлении приемника (точки А). Напряжение на приемнике будет зависеть от протяженности и движения радиолокационных объектов:
а) при отражении от точечных неподвижных объектов:
ui(t,) = Ui()sin[(t–i)], (2)
где на основе формулы (2) [i;(i+и)], i[и; Tп], t[и; Tп] ; Ui(t) – амплитуда радиоимпульса; i – задержка принятого сигнала относительно момента излучения:
i=2Si/c, (3)
где Si – расстояние от точки A до i-ой цели; i =![]() , н – количество неподвижных точечных целей; c – скорость света;
, н – количество неподвижных точечных целей; c – скорость света;
б) при отражении от п точечных (см. (3)) подвижных целей:
ui(t,) = Ui()sin[(+i)(t–i)],(4)
где i =Fi :
доплеровское смещение частоты приближающейся i-ой цели, Si(t) – текущее расстояние от точки A доi-ой подвижной цели, i=![]() ;
;
в) при отражении от пн протяженных неподвижных целей
ui(t,) = Ui()sin{[t–(мин.i+макс.i)]},
где мин.i = Sмин.i/c; макс.i = Sмакс.i/c; Sмин.i и Sмакс.i – соответственно расстояния от точки A до ближней и дальней границi-ой цели, i=![]() ;
;
г) при отражении от пп протяженных подвижных целей[5]
ui(t,) = Ui()sin{(+i)[t–(мин.i(t)+макс.i(t))]},(6)
где
мин.i(t) = Sмин.i/c = 2SB(t)/c; макс.i(t) = Sмакс.i/c = 2SС(t)/c(7)
соответственно расстояния от точки A до ближней и дальней границi-ой линейно вытянутой цели, i=![]() ; i – ширина спектра доплеровского смещения.
; i – ширина спектра доплеровского смещения.
i= 2(fмакс.i – fмин.i) = 2[(f0 + Fмакс.i)– (f0 +Fмин.i] = 2( Fмакс.i– Fмин.i),(8)
Fмакс.i и Fмин.i — доплеровские сдвиги частоты ЭМК (см. формулу (5)) отраженных от i-ой, i=
 ;
;  ;(9)
;(9)
соответствующие максимальной и минимальной скоростям взаимного перемещения
 ;
; , (10)
, (10)
где q — множество точек на поверхности цели, r — индекс относящий скорость к относительному движению точек цели и точки A.
- Обработка радиолокационных сигналов всистеме обнаружения технологических препятствий нормальному функционированию снегоуборочных железнодорожных единиц исистеме контроля поперечных пространственных перемещений кузова вагона
Принцип работы системы обнаружения технологических препятствий нормальному функционированию снегоуборочной единицы (СОТП), как и системы контроля поперечных колебаний вагонов (СКПК) заключается в вычислении координат «дальность-пространственный угол» элементов облучаемой поверхности с помощью дальномерно-доплеровской обработки принимаемых отраженных радиолокационных сигналов, при которой отраженный сигнал подвергается многоканальному стробированию по дальности и многоканальной узкополосной фильтрации.
Многоканальное стробирование по дальности.Стробированием временно́го диапазона от tмин до tмакс, что соответствует диапазону измерения дальности от Dмин до Dмакс, стробами длительностьюk(t) пространство вокруг точки А (рис.4) разбивается на слои неопределенности - сферические кольца, с помощью которых определяется положение точки Аk. Длительность k(t) k-го строб-импульса – функция измеряемой координаты Dk:
k(t)=2Dk(Dk)/Ck, k=1,2,…n,(11)
где Ck – скорость распространения электромагнитных колебаний вдоль луча АAk.
где Ck — скорость распространения электромагнитных колебаний вдоль луча АAk.
Причем, должно выполняться условие
n>Dмакс/d, (12)
где d — допустимый уровень дискретизации дальности, который устанавливается директивно.
Признак попадания отражающей точки Ak в k-е сферическое кольцо, т. е. в область k-1,k(рис.1) проверяется в корреляционных обнаружителях выполнением условия
Uи.k>Uпор.k, (13)
где Uпор.k — априори заданный порог обнаружения,
 ,
, ![]() . (14)
. (14)
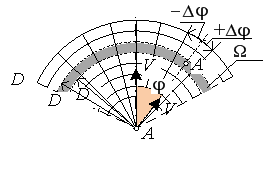
Рис.1. К вопросу пояснения дальномерно-доплеровской обработки радиолокационного сигнала в границах основного лепестка ДН
Многоканальная узкополосная фильтрация. Благодаря взаимному движению точек Ak и А, принятый отраженный сигнал наблюдается с доплеровским сдвигом. Так, в случае встречного движения точек А и Ak:
f0 +Fд.макс.k fпрм.k f0.(15)
Вычисление доплеровского сдвига в пределах интервала (15), с использованием Qkчастотных фильтров с прямоугольной амплитудно-частотной характеристикой и эффективной полосой пропускания Пэ.kq приводит к выражению:
 , (16)
, (16)
где Fзап.k = (0,030,05)Fд.макс.k – запас на перекрытие полос Пэ.kq.
Взаимосвязь угловой ошибки пеленгации q с полосой пропускания фильтра Пэ.kq и угловым положением q точки k:
Пэ.kq = fмакс.kq – fмин.kq ={f0 +[2V0cos(k+q)]/}–
– {f0 +[2V0cos(k–q)]/}= 2Fмаксsinqsinq .(17)
Учитывая, что допустимая ошибка устанавливаетсядирективно qзад < 0,1 рад, выражение (17) упрощается:
Пэ.зад.k 2Fмакс.задsinq.(18)
Из (18) возможно определение угловой координаты цели по результату измерения доплеровского смещения частоты:
q= arcsin(Пэ.k/(2Fмакс.зад), (19)
где Пэ.k– эффективная полоса пропускания k–го канала доплеровского приемника, на выходе обнаружителя которого наблюдается максимальный уровень сигнала.
Выражение (19) показывает, что для достижения постоянной угловой разрешающей способности q при
/2>q[макс;мин] (20)
необходимо применить многоканальную частотную фильтрацию из Q каналов:
Q = (макс –мин)/q(21)
с изменяющимися эффективными полосами.
Пересечение конической поверхности диаграммы направленности антенны сферическими поверхностями уровня дальности и коническими поверхностями уровня доплеровского угла (рис.1):
![]() , (22)
, (22)
где k-1 и k, – сферические области с радиусами границ слоев неопределенности соответственноDk–1 иDk; Фq+ и Фq–– соответственно части пространства ограниченные односторонними коническими поверхностями с общей вершиной в т. А и углами при вершине соответственно (q +зад) и (q – зад),
образует nxQ элементов с номером kqкаждый, где n - число стробов дальности в зоне обзора, Q - число фильтров.
Далее, в зависимости от полученных координат «Дальность-пространственный угол» элементов поверхности радиолокационных объектов (РЛО), которые представимы в виде матрицы G размерностью n xQ, микропроцессорным вычислителем производится:
Для процесса 1: логическая операция определения наличия/отсутствия технологического препятствия. Критерием обнаружения препятствия служит условие
Dkq <Dпор.kq, (23)
где Dkq — дальность элемента отражающей поверхности под номером kq, Dпор.kq — пороговое значение дальности элемента под номером kq.
При обнаружении последнего определяется его тип (лобовое, боковое, смешанное, в зависимости от расположения относительно оси железнодорожного пути) и формируется управляющее воздействие на соответствующий рабочий орган.
Для процесса 2: определение превышения/непревышения порогового значения амплитуды и частоты поперечных колебаний вагона. При этом амплитуда колебаний вагона рассчитывается как
Аk=Dkмакс-Dkмин, (24)
где Dkмакс,Dkмин — соответственно максимальная и минимальная дальность за один период колебания вагона,
частота колебаний как:
 . (25)
. (25)
Критерием попадания m-ого вагона в зону критических параметров поперечных колебаний служат соотношения
Аk>Аk пор; Fk>Fkпор, где Аk пор, Fkпор — пороговые значения амплитуды и частоты колебаний.
- Радиолокационно-доплеровская система контроля целостности железнодорожного состава на ходу поезда (РДСКЦ)
Согласно (8), скоростям ![]() и
и![]() соответствуют точки B и C(рис. 2). Параметры радиолокационного сигнала, отраженного от линейного объекта, которым является подвижной состав, а именно: его временная задержка и длительность; минимальный доплеровский сдвиг принимаемого сигнала и ширина доплеровского спектра — это функции длины объекта.
соответствуют точки B и C(рис. 2). Параметры радиолокационного сигнала, отраженного от линейного объекта, которым является подвижной состав, а именно: его временная задержка и длительность; минимальный доплеровский сдвиг принимаемого сигнала и ширина доплеровского спектра — это функции длины объекта.
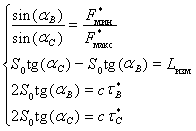
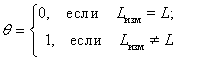
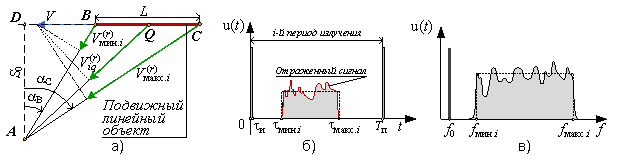 Рис. 2. Относительное движение линейного объекта (а), временные (б) и спектральные (в) параметры принимаемых отраженных от него ЭМК
Рис. 2. Относительное движение линейного объекта (а), временные (б) и спектральные (в) параметры принимаемых отраженных от него ЭМК
На основе этого вывода, особенностей движения объекта (рис. 2) и формул (3), (5), (7), (8),(9), (10) следует система уравнений:
 , (26)
, (26)
где знаком (*) обозначены величины, полученные в результате статистической обработки радиолокационных измерений [12]; Lизм — искомая текущая длина контролируемого поезда, решение системы (26).
Избыточность системы уравнений (26) позволяет выбрать для контроля целостности те физические величины из набора F*мин, F*макс, *B, *С, которые определяются с наибольшей достоверностью.
Критерием для принятия решения о целостности поезда служит бинарный параметр
 . (27)
. (27)
Информацию о заданном значении длины L подвижного состава возможно получить, используя радиолокационную систему с активным ответом.
Выводы. Особенности радиолокационного обзора верхнего строения железнодорожного пути и прилегающего пространства, включая подвижной состав, в приведенных системах формируют ряд технических требований к приемопередатчикам и вычислительным устройствам. А именно:
использование электромагнитного излучения диапазона сверхвысоких частот (СВЧ);
для реализации дальномерно-доплеровской обработки сигналов:
высокая вычислительная производительность микропроцессорных вычислительных устройств. Так, для формирования матрицы G координат «дальность-пространственный угол» размерностью 512х512 при работе в реальном времени, число операций вычислителя должно быть не менее 250 млн за секунду [14].
использование активной фазированной антенной решетки с переключением областей обзора для устранения неоднозначности отсчета (с точностью до четверти сферы).
применение корреляционной или согласованной фильтрации.
для реализации радиолокационно-доплеровской системы контроля целостности:
применение двумерной статистической оптимальной обработки входного сигнала;
использование в тракте СВЧ приемника малошумящего усилителя.
Автоматизация рассмотренных в работе процессов, возможная благодаря применению радиолокации, позволит повысить уровень безопасности движения железнодорожных объектов, что является важнейшей задачей в условиях непрерывного увеличения пропускной способности железнодорожных линий.
Литература:
- Марюхненко В. С. Информационное обеспечение подвижных транспортных средств на основе интегрированных навигационных систем. Монография/ Мухопад Ю. Ф., Демьянов В. В., Миронов Б. М./ под. ред. В. С. Марюхненко. — Новосибирск: Наука, 2014. — 256 с.
- Радиоэлектронные системы: Основы построения и теория. Справ. Изд. 2-е перераб. и доп. / под ред.Я. Д. Ширмана. — М.: Радиотехника, 2007. — 512 с.
- Демиденко П. П. Судовые радиолокационные и радионавигационные системы. Учеб.пособие. Одесса, 2008 г Электронный ресурс http://mexalib.com/view/18262.
- Баранов Л. А., Головичер Я. М., Ерофеев Е. В., Максимов В. М. Микропроцессорные системы автоведения электроподвижного состава / Под ред. Л. А. Баранова. М.: Транспорт, 1990. — 272 с.
- G.Hilger. Glasers Annalen, 1998, N9/10, S.533– 541
- Шелухин В. И. Автоматизация и механизация сортировочных горок. — М.: Маршрут, 2005. — 240 с.
- Гурулёва М. А., Марюхненко В. С. Применение доплеровского измерителя для определения скорости подвижных железнодорожных единиц // Современные проблемы радиоэлектроники: сб. науч. тр. [Электронный ресурс] / науч. ред. В. Н. Бондаренко; отв. за вып. А. А. Левицкий. — Электрон. дан.(32 Мб). — Красноярск: Сиб. федер. ун-т, 2015. — с. 35–39.
- Гурулёва М. А. Управление рабочими органами плужного снегоочистителя с использованием радиолокационно-доплеровского канала обзора прилегающего пространства // Современные проблемы теории машин. — North Charleston, USA, 2016. — № 4(1). — с.197–205.
- Гурулёва М. А. Автоматическое бесконтактное обнаружение вагонов с интенсивным вилянием в составе движущегося поезда // Транспортная инфраструктура Сибирского региона: материалы Шестой международной научно-практической конференции, посвященной 40-летию со дня образования Иркутского государственного университета путей сообщения, 2015г. Иркутск: в 2 т., Т.2. — Иркутск: ИрГУПС, 2015. — с. 369–373.
- Марюхненко В. С., Гурулёва М. А. Особенности применения радиолокационных измерителей скорости подвижных объектов железнодорожного транспорта//Вестник ИрГТУ [текст]. — Иркутск: ФГ БОУ ВО ИРНИТУ. — 2016. — № 1 (108). — с.129–142.
- Дудник П. И., Чересов Ю. И. Авиационные радиолокационные устройства. — М.: ВВИА им. проф. Н. Е. Жуковского. 1986. — 533с.
- Тихонов В. И. Статистическая радиотехника. М.: Радио и связь. 1982.- 624с.
- Радиоэлектронные системы: Основы построения и теория. Справ. Изд. 2-е перераб. и доп. / под ред.Я. Д. Ширмана. — М.: Радиотехника, 2007. — 512 с.
- Витязев В. В., Колодько Г. Н., Витязев С. В. Способы и алгоритмы формирования радиолокационного изображения в режиме доплеровского обужения луча// Цифровая обработка сигналов. — М.: Российское научно-техническое общество радиотехники, электроники и связи имени А. С. Попова. — 2006. — № 3. — с.31–41.
[1] Настилы железнодорожных переездов, пешеходных переходов, напольное оборудование комплекса технических средств КТСМ, устройств контроля схода подвижного состава УКСПС, датчики диагностических комплексов, контррельсы, сбрасывающие стрелки перед мостами, тоннелями, негабаритные светофоры, опоры контактной сети и пр. [2]
[2] Для плужного снегоочистителя представляют собой независимо функционирующие лобовой щит и боковые крылья
[3] Под целостностью железнодорожного поезда в движении на n-м участке контроля понимается такое его состояние, при котором он находится в том же составе подвижных железнодорожных единиц (локомотивов, вагонов, платформ и др.), что и при выходе поезда с предыдущего (n-1) – го контролируемого участка, где n=1, 2, 3,… – номер контролируемого участка вдоль железнодорожной линии, отсчитываемый от директивно установленной точки.
[4] См. например, [2, 11].
[5] Без учета биений, возникающих из-за взаимодействия отражений от различных точек протяженного объекта.
