





В статье приводится описание простой в изготовлении модели лифта, предназначенной для демонстрации веса тела, а также явлений перегрузки и невесомости на уроках физики. Модель изготавливается из пластиковой бутылки с пробкой, резинового жгута, изоленты, металлического кольца и тяжелого цилиндра.
Ключевые слова: вес тела, невесомость, перегрузка, лифт, пластиковая бутылка, законы Ньютона, классическая механика, физические опыты, обучение физике.
Во многих школьных учебниках по физике в курсе классической механики при изучении веса рассматривается задача с лифтом, движущимся равномерно или равноускорено [1, с. 77–78]. Рассмотрим эту задачу подробнее. Пусть к потолку лифта подвешено тело на упругом подвесе. Для тела можно записать второй закон Ньютона:
![]()
В то же время подвес и тело взаимодействуют согласно третьему закону Ньютона:
![]()
![]()
Для лучшей наглядности вектор, обозначающий силу упругости на рисунках, соответствующих третьему закону, будем смещать влево.
Равномерное движение по вертикали. При равномерном движении по вертикали вверх или вниз, а также в случае покоя лифта (рис. 1), второй закон Ньютона после проецирования на ось, направленную вертикально вверх, будет иметь следующий вид:
отсюда
![]()
Учитывая третий закон Ньютона, получаем
![]()
В этом случае вес подвешенного тела равен по абсолютной величине силе тяжести.
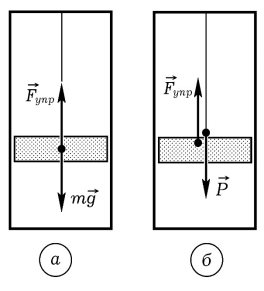
Рис. 1. Лифт движется равномерно (без ускорения) или покоится
Равноускоренное движение по вертикали. В случае, когда лифт движется с ускорением, направленным вверх (рис. 2), имеем
![]()
Тогда
Следовательно,
![]()
Иными словами, вес тела по величине больше силы тяжести.
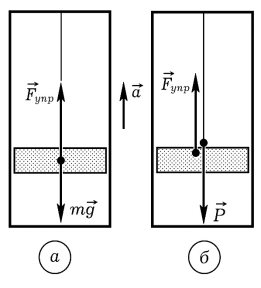
Рис. 2. Движение лифта с ускорением, направленным вертикально вверх
Если лифт движется c ускорением (a < g), направленным вниз (рис. 3), то
![]()
![]()
Поэтому
![]()
Вес тела меньше силы тяжести.
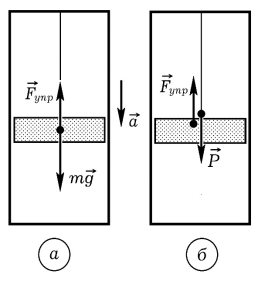
Рис. 3. Движение лифта с ускорением, направленным вертикально вниз и меньшим, чем ускорение свободного падения
Свободное падение. Если лифт движется вниз с ускорением a = g (рис. 4), получаем
![]()
![]()
Тогда
![]()
Это состояние невесомости, в котором вес тела равен нулю.
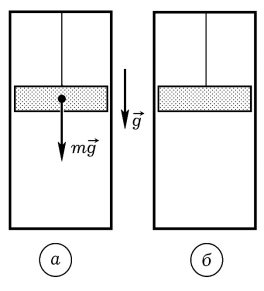
Рис. 4. Свободное падение лифта (движение с ускорением свободного падения)
Рассмотренная выше задача решается теоретически. А как проверить справедливость теории на практике? Провести опыты с реальным лифтом для демонстрации явления невесомости вообще невозможно. Остальные опыты могут быть проведены, но их невозможно продемонстрировать одновременно большому количеству учащихся. Тем не менее, выход есть.
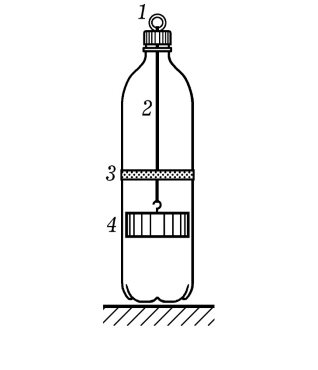
Рис. 5. Физическая модель лифта, изготовленная из пластиковой бутылки
При изучении понятий веса, невесомости и перегрузки в школе можно использовать простую, легко конструируемую модель лифта для демонстрации состояний весомости и невесомости (рис. 5). Модель представляет собой пластиковую полуторалитровую бутылку, внутри которой к пробке с помощью резинового жгута 2 круглого сечения прикреплен цилиндр 4, свободно перемещающийся внутри бутылки. Диаметр цилиндра чуть меньше внутреннего диаметра бутылки. Для размещения цилиндра внутри бутылки полностью отрезается нижняя часть бутылки, затем в бутылку помещается цилиндр, после чего в местах разреза отрезанные друг от друга части бутылки скрепляются с помощью прозрачного скотча. На поверхность бутылки нанесена метка 3 из изоляционной ленты, соответствующая состоянию невесомости, то есть такому положению цилиндра, когда прикрепленный к нему жгут не растянут. Для подвешивания бутылки и удержания ее в руке к пробке прикреплено металлическое кольцо 1.
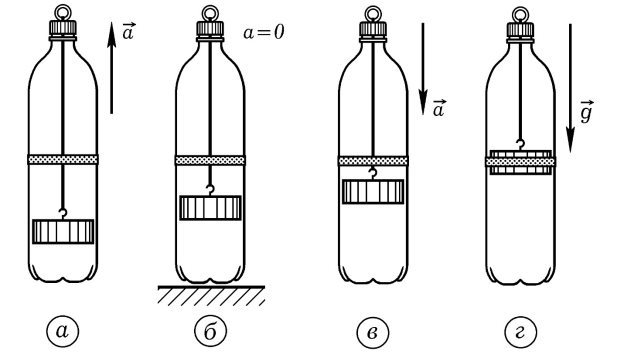
Рис. 6. Опыты с моделью, позволяющие продемонстрировать состояние перегрузки (а), вес тела в покое (б), уменьшение веса тела (в) и его невесомость (г)
Демонстрация веса тела в состоянии покоя. Неподвижная бутылка находится на опоре или удерживается в руке (рис. 6, б). Резиновый шнур растянут. Цилиндр находится ниже отметки, соответствующей состоянию невесомости цилиндра.
Демонстрация перегрузки. Неподвижную бутылку держат за верхнюю часть. Замечают величину деформации шнура. После этого резким движением поднимают бутылку. Отмечают, что при движении деформация шнура увеличилась (рис. 6, а). Цилиндр в бутылке опустился ниже, чем это было в предыдущем опыте (рис. 6, б).
Демонстрация невесомости. Бутылку держат в руке. Шнур деформирован. Отпускают бутылку и наблюдают, что во время ее свободного падения деформация шнура отсутствует (рис. 6, г). При этом цилиндр расположен на уровне отметки из изоляционной ленты, обозначающей состояние недеформированного шнура. Для безопасности лучше сделать так, чтобы бутылка падала на большой кусок поролона.
Демонстрация уменьшения веса тела. При движении бутылки с ускорением, направленным вниз и меньшим ускорения свободного падения, замечают, что деформация шнура уменьшается по сравнению с состоянием, изображенным на рис. 6, б, что говорит о том, что при таком движении вес тела уменьшается (рис. 6, в).
Можно обозначить с помощью цветной изоляционной ленты и положение цилиндра, соответствующее состоянию покоя бутылки (рис. 6, б). Желательно, чтобы лента была другого цвета, отличного от цвета изоленты, обозначающей положение цилиндра, соответствующее свободному падению бутылки.
С предложенной моделью лифта можно провести и другие опыты, придумать которые мы предлагаем читателям самостоятельно.
Литература:
- Антонова Н. П. Физика 9: Основы динамики: Рабочая тетрадь / Н. П. Антонова, О. Е. Данилов, Е. Г. Московкина; Под ред. В. В. Майера. — Глазов: ГГПИ, 1997. — 80 с.
