





In today's world, acts as an important issue safety and protection of people. The most important thing is to protect the population from attacks. Such crimes will not be tolerated, so created a robot designed to detect and destroy explosive devices.
Keywords: robot, security, six-component sensor
Задачи по созданию мобильных роботов, способных выявлять и уничтожать взрывчатые устройства, имеет успех в военных целях. Это востребовано для ведения антитеррористической борьбы. В последнее время в нашей стране высокий риск терактов, поэтому мы создали робота, который справится с обнаружением и ликвидацией взрывчатых устройств.
Основным назначением мобильного робота является визуальная, а также акустическая разведка местности, зданий, машин, труднодоступных мест, выявление и ликвидация взрывчатого устройства. Малогабаритный робот оснащается быстросъемным рабочим оборудованием.

Рис. 1. Робот для ликвидации взрывчатых устройств
В робота включены сенсоры, манипулятор, пульт управления, колесная платформа, разрушитель взрывчатых устройств. Робот оснащается трехосной полноприводной платформой. Машина может передвигаться по слабопересеченной местности, преодолевать водные преграды и препятствия. Манипулятор обладает несколькими степенями свободы и включает в себя механизмы гидродинамического разрушителя взрывчатого устройства и наведения видеокамеры. Обследователь труднодоступные места, находить и уничтожать объекты позволяет выдвижная телескопическая штанга. [3]
Уничтожение взрывчатого устройства производится с помощью гидродинамического выстрела, который превышает скорость детонирования, что позволяет избежать взрыва. Также робот имеет специальный контейнер, в который можно сбросить взрывчатое устройство, отвезти на безопасное расстояние и произвести подрыв. [1]
Робот оснащен шестикомпонентным сенсором усилий ![]() . Для него справедливы расчетные соотношения. Будем считать, что вес объекта значительно превосходит вес схвата, поэтому последним пренебрегаем. Для простоты расчетных соотношений положим также, что система координат схвата совпадает с системой координат основания сенсора.
. Для него справедливы расчетные соотношения. Будем считать, что вес объекта значительно превосходит вес схвата, поэтому последним пренебрегаем. Для простоты расчетных соотношений положим также, что система координат схвата совпадает с системой координат основания сенсора.
По информации от датчиков можно определить массу и координаты центра тяжести объекта.
Очевидно, если сенсор регистрирует только силу тяжести объекта в схвате, то массу объекта можно легко определить по формуле
![]()
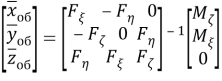
где ![]() определены. Для расчета координат центра тяжести объекта воспользуемся соотношениями
определены. Для расчета координат центра тяжести объекта воспользуемся соотношениями
![]()
![]()
![]()
Так как определитель этой системы равен нулю (вследствие того, что моменты ![]() не изменяются от перемещения точки приложения силы вдоль линии ее действия), будем искать точку
не изменяются от перемещения точки приложения силы вдоль линии ее действия), будем искать точку ![]() пересечения линии действия силы тяжести, направляющий вектор которой
пересечения линии действия силы тяжести, направляющий вектор которой ![]() с перпендикулярной ей плоскостью, проходящей через начало координат системы 0XYZ. Уравнение этой плоскости
с перпендикулярной ей плоскостью, проходящей через начало координат системы 0XYZ. Уравнение этой плоскости
![]()
Далее находим координаты пересечения линии действия силы F с этой плоскостью
C помощью этих преобразований мы находим абсолютные координаты точки плоскости через которую проходит вертикальная линия силы тяжести объекта.
Сравнение полученных соотношений показало, что размещение датчика в запястье робота сопровождается существенным упрощением расчетных зависимостей и уменьшением числа вычислительных операций.
Робот может зарекомендовать себя в реальных условиях эксплуатации, решает задачи, связанные с обнаружением и ликвидацией взрывчатых устройств. Предлагаемая конструкция сенсора улучшает динамику его маневренности по труднопроходимой местности в процессе эксплуатации робота. Представленный робот многофункционален благодаря шестикомпонентному сенсору.
Литература:
- Поезжаева Е. В. Промышленные роботы: учебное пособие в 3 ч. — М.; УМО АМ МВТУ им. Баумана; изд-во ПГТУ, 2009.
- А. И. Корендясев, Б. Л. Саламандра, Л. И. Тывес. Теоретические основы робототехники; Книга 1; изд-во Наука, 2006.
- http://bibliofond.ru/view.aspx?id=655956
