





Использование СПК207 для управления электроприводами шаровых кранов BELIMO спомощью модулей МУ110–8Р, МУ110–6У по протоколу ModbusRTU
Мищенко Александр Константинович, студент;
Коваленко Марк Витальевич, магистрант
Комсомольский-на-Амуре государственный технический университет
Ключевые слова: электропривод, контроллер, Modbus, модули ввода-вывода
В современных системах АСУТП широко применяются системы управления электроприводами на базе ПЛК. Также в большинстве таких систем применяются инструменты визуализации технологического процесса, такие как сенсорные панели. Компания ОВЕН смогла объединить ПЛК и сенсорную панель в одном устройстве — сенсорный панельный контроллер (СПК). СПК позволяет управлять приводами и различными модулями по протоколам Modbus RTU/ASCII/TCP, Owen через разъемы COM. Применение таких СПК также возможно в различных системах автоматизации [1–3].
В данной статье рассмотрен пример управления электроприводами шаровых кранов BELIMO серии LR (рисунок 1) [4] контроллером ОВЕН СПК207 с помощью модулей МУ110–6У и МУ110–8Р [5, 6] по протоколу Modbus RTU.

Рис. 1. Внешний вид электропривода шарового крана BELIMO серии LR
В статье рассматривается управление электроприводами серии LR с питанием от постоянного напряжения 24В, который имеет управляющий канал 0–10 В и канал обратной связи 0–10 В, помимо этого в работе используется электропривод с питанием от переменного напряжения 230 В, без канала обратной связи.
Для реализации проекта необходимо предварительно настроить адреса и параметры связи модулей в сети Modbus RTU с помощью программы конфигуратор Мx110 компании ОВЕН. Настройки параметров связи модулей приведены в таблице 1. У модуля МУ110–6У слейв адрес задан по умолчанию — 16. Модуль МУ110–8Р имеет слейв адрес 32.
Таблица 1
Настройки параметров связи модулей ввода-вывода
|
Скорость обмена данными, кбит/с |
9600 |
|
Контроль четности |
Отсутствует |
|
Информационные биты |
8 |
|
Стоповые биты |
1 |
|
Таймаут отклика, мс |
100 |
Затем необходимо в меню — конфигураторе контроллера переключить используемый в работе COM — порт с RS-232 на RS-485 [8,9]. В рассматриваемом проекте используется COM — порт 3.
Далее в среде CoDeSys 3 [8] необходимо создать проект и добавить библиотеку Mx110_Drivers. Затем следует добавить COM — порт, Modbus Master и используемые в проекте модули ввода-вывода (рисунок 2), и после настроить их параметры связи аналогично данным в таблице 1.
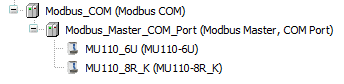
Рис. 2. Настройка COM-порта
Затем необходимо написать небольшую программу на контроллер и объявить соответствующие переменные для задания значений модулей. (рисунок 3) Программу напишем на языке CFC [7, 8, 9, 10, 12].
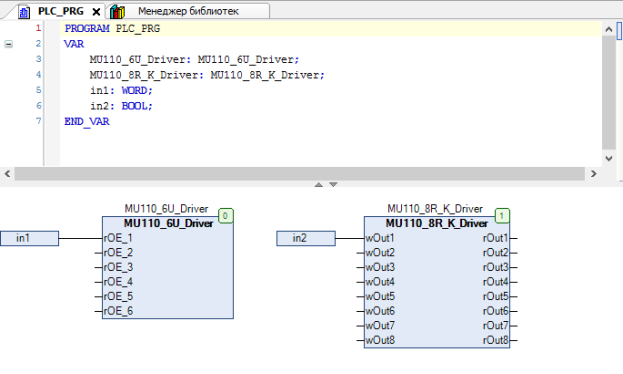
Рис. 3. Программа для СПК207 на языке CFC
После того, как программа написана следует подключить электроприводы шаровых кранов к модулям ввода-вывода согласно схемам подключения, которые приведены в руководствах по эксплуатации модулей и на рисунках 4, 5.
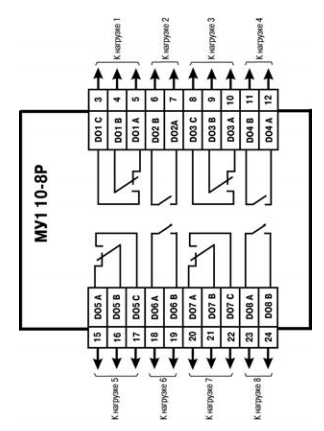
Рис. 4. Схема подключения к модулю МУ110–8Р
С помощью модуля МУ110–8Р будем управлять электроприводом шарового крана, который питается и управляется однофазным переменным напряжением 220 В. На рисунке 4 изображена схема подключения модуля. В рассматриваемом проекте к выходу DO1С модуля МУ110–8Р подключен управляющий канал соответствующего электропривода шарового крана, а к выходу DO1B подключена фаза от сети 220 В. Помимо этого, на провода питания этого же электропривода необходимо подать однофазное переменное напряжение 220 В. При срабатывании реле замыкает контакты DO1B и DO1C, что приводит в действие электропривод.

Рис. 5. Схема подключения к модулю МУ110–6У
С помощью модуля МУ110–6У будем управлять электроприводом шарового крана, который питается и управляется постоянным напряжением 24 В. На рисунке 5 изображена схема подключения модуля. В рассматриваемом проекте к выходу AO1B и AO1С модуля МУ110–6У подключен источник питания 24 В, а к выходу AO1A подключен управляющий канал соответствующего электропривода. Помимо этого, необходимо установить перемычку между выходами AO1A и AO1B. Подача на вход управляющего канала сигнала напряжения 0–10 В приводит в действие электропривод шарового крана.
Для наглядности создадим небольшую визуализацию процесса [11], приведенную на рисунке 6.
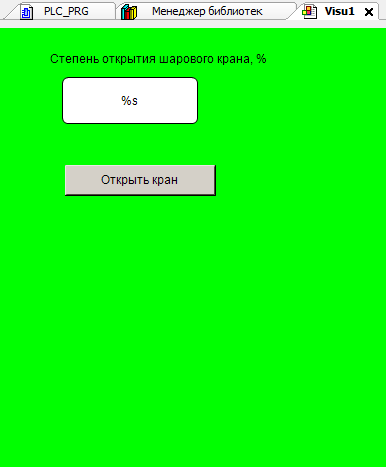
Рис. 6. Окно визуализации
К белому прямоугольнику подвязываем переменную in1. Уставку будем задавать в процентах.
К кнопке Открыть кран необходимо подвязать переменную in2.
Далее подключаемся к контроллеру Онлайн/Логин, Онлайн/Старт и задаем значение степени открытия клапана в процентах для первого электропривода. Чтобы привести в действие второй электропривод необходимо нажать кнопку Открыть кран.
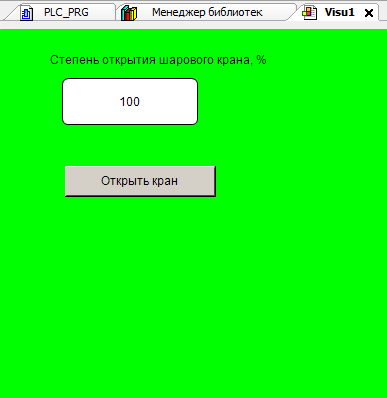
Рис. 7. Окно визуализации после подключения к контроллеру
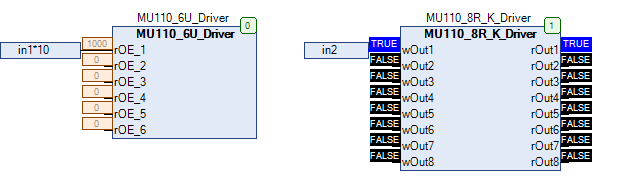
Рис. 8. Программа на языке CFC в режиме онлайн после включения электроприводов шарового крана
В заключении хотелось бы добавить, что достоинствами управления электроприводами шарового крана с помощью СПК являются:
- Удобство работы с системой, благодаря наличию визуализации на панели контроллера.
- Наличие в СПК 207 ПЛК позволяет расширять возможности АСУ ТП за счет добавляемых модуле и устройств управления.
Литература:
- Ульянов А. В., Коваленко М. В. Использование СПК207 для управления привода ОВЕН ПЧВ3 по протоколу Modbus RTU // Молодой ученый. — 2016. — № 5. — С. 86–92.
- Ульянов А. В., Коваленко М. В. Управление шаговым двигателем с помощью NI MyRIO [Текст] // Технические науки: теория и практика: материалы III междунар. науч. конф. (г. Чита, апрель 2016 г.). — Чита: Издательство Молодой ученый, 2016. — С. 43–46.
- Мищенко А. К. Стенд для изучения современных технологий автоматизации / А. К. Мищенко, В. А. Егоров // Научно-техническое творчество аспирантов и студентов: материалы докладов 46-й науч.-техн. конф., Комсомольск-на-Амуре: ГОУВПО «КнАГТУ», 2016. — С. 401–402
- Устройства регулирования водяного потока belimo // Каталог продукции 2016. URL: http://www.belimo.ru/belimo_docs/New %20Folder/Каталог %20УСТРОЙСТВА %20РЕГУЛИРОВАНИЯ %20ВОДЯНОГО %20ПОТОКА %20BELIMO_2016_CD.pdf (дата обращения: 10.06.2016)
- Модули дискретного вывода МУ110–220.8Р, МУ110–24.8Р, МУ110–224.8Р, МУ110–220.8К, МУ110–24.8К и МУ110–224.8К, Руководство по эксплуатации // ОВЕН. ОБОРУДОВАНИЕ ДЛЯ АВТОМАТИЗАЦИИ. URL: http://www.owen.ru/uploads/re_mu110–8r_k__2125.pdf (дата обращения: 09.06.2016).
- Модули аналогового вывода МУ110–220.6У, МУ110–24.6У, и МУ110–224.6У, Руководство по эксплуатации // ОВЕН. ОБОРУДОВАНИЕ ДЛЯ АВТОМАТИЗАЦИИ. URL: http://www.owen.ru/uploads/re_mu110–6u_2123.pdf (дата обращения: 09.06.2016).
- СПК2хх Панель оператора программируемая c сенсорным экраном Руководство по эксплуатации // ОВЕН. ОБОРУДОВАНИЕ ДЛЯ АВТОМАТИЗАЦИИ. URL: http://www.owen.ru/uploads/re_spc2xx_1892.pdf (дата обращения: 09.06.2016).
- Руководство пользователя: CoDeSys V3, установка и первый запуск Редакция 3.0 // ОВЕН. ОБОРУДОВАНИЕ ДЛЯ АВТОМАТИЗАЦИИ. URL: http://ftp.owen.ru/index.html/CoDeSys3/11_Documentation/00_CODESYS/CoDeSys3run_v3.0.pdf (дата обращения: 09.06.2016).
- СПК Система версий ПО. Конвертация проектов // ОВЕН. ОБОРУДОВАНИЕ ДЛЯ АВТОМАТИЗАЦИИ. URL: http://ftp.owen.ru/index.html/CoDeSys3/11_Documentation/01_SPK/SPK_System_Version_v1.1.pdf (дата обращения: 09.06.2016).
- СПК ПЕРВЫЙ СТАРТ Руководство для начинающих пользователей // ОВЕН. Оборудование для автоматизации. URL: http://ftp.owen.ru/index.html/CoDeSys3/11_Documentation/01_SPK/SPK_First_start_v.0.8.pdf (дата обращения: 09.06.2016).
- СПК Визуализация Руководство для начинающих и продвинутых пользователей // ОВЕН. Оборудование для автоматизации. URL: http://ftp.owen.ru/index.html/CoDeSys3/11_Documentation/01_SPK/SPK_Visu_v.1.0.pdf (дата обращения: 10.06.2016).
- СПК FAQ // ОВЕН. Оборудование для автоматизации. URL: http://ftp.owen.ru/index.html/CoDeSys3/11_Documentation/01_SPK/SPK_FAQ_v.1.1.pdf (дата обращения: 10.06.2016).
