





В статье предложен авторский вариант декомпозиции линейной системы обыкновенных дифференциальных уравнений, описывающей динамику квадрокоптера, упрощающий последующий анализ модели и синтез системы управления. Данный подход позволяет преобразовать сложную MIMO-систему в 6 независимых SISO-подсистем.
Ключевые слова: квадрокоптер, системы управления, декомпозиция, пространство состояний
В настоящее время сфера применения беспилотных летательных аппаратов (далее БПЛА) в жизнедеятельности человека неуклонно расширяется. Так, ни одна современная военная операция не происходит без предварительной разведки с применением БПЛА. Крупные интернет-магазины уже используют дронов-курьеров в штатном режиме. Обыкновенному же пользователю БПЛА могут предложить возможность проведения качественной фото- или видеосъемки любого события по вполне приемлемым ценам. В данной статье будет рассмотрена математическая модель БПЛА с четырьмя несущими винтами, вращающимися в диагонально противоположных направлениях. Данная математическая модель основана на системе обыкновенных дифференциальных уравнений, которая получена путем линеаризации системы, выведенной в [1]. Так как синтез системы управления и анализ модели значительно упрощается при работе с SISO-системами (Single-Input Single-Output), по сравнению с MIMO-системами (Multiple-Input Multiple-Output), работа посвящена декомпозиции линейной MIMO-системы на несколько SISO-подсистем.
Основным объектом данной работы является система обыкновенных дифференциальных уравнений, полученная из модели динамики квадрокоптера вида (1), представленной в [1], путем линеаризации в окрестности положения равновесия (2).
![]() .(1)
.(1)
 (2)
(2)
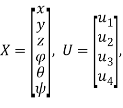
Где управляющий сигнал ![]() представляет собой квадрат угловой скорости винта i-го мотора квадрокоптера,
представляет собой квадрат угловой скорости винта i-го мотора квадрокоптера, ![]() — координаты центра масс квадрокоптера в абсолютной системе координат,
— координаты центра масс квадрокоптера в абсолютной системе координат, ![]() — углы Эйлера, представляющие собой ориентацию квадрокоптера (крен, тангаж и рысканье соответственно). Значение
— углы Эйлера, представляющие собой ориентацию квадрокоптера (крен, тангаж и рысканье соответственно). Значение ![]() находится из уравнения вертикальной динамики квадрокоптера с допущением, что при данной величине управляющего сигнала БПЛА висит в воздухе неподвижно (по оси
находится из уравнения вертикальной динамики квадрокоптера с допущением, что при данной величине управляющего сигнала БПЛА висит в воздухе неподвижно (по оси ![]() ) в горизонтальном положении:
) в горизонтальном положении:
![]()
Таким образом, значение управляющего сигнала
![]()
где ![]() — масса квадрокоптера,
— масса квадрокоптера, ![]() — сила тяжести и
— сила тяжести и ![]() — коэффициент тяги моторов. Подробнее с исходной нелинейной моделью квадрокоптера (а так же с ее выводом) вы можете ознакомиться в [1].
— коэффициент тяги моторов. Подробнее с исходной нелинейной моделью квадрокоптера (а так же с ее выводом) вы можете ознакомиться в [1].
Для линеаризации системы разложим правую часть системы в отклонениях от положения равновесия в ряд Тейлора как функцию нескольких переменных и отбросим нелинейные слагаемые. В результате получим следующую систему ОДУ:
 ,(3)
,(3)
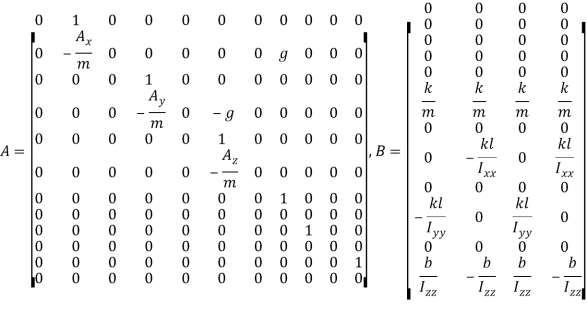
где ![]() — коэффициенты аэродинамического сопротивления, l — расстояние от центра масс квадрокоптера до моторов,
— коэффициенты аэродинамического сопротивления, l — расстояние от центра масс квадрокоптера до моторов, ![]() — моменты инерции,
— моменты инерции, ![]() — коэффициент крутящего момента моторов.
— коэффициент крутящего момента моторов.
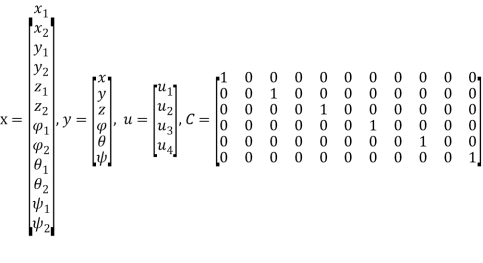
Переходя от линейной системы (3) к системе в пространстве состояний (4), получим модель квадрокоптера с 4 входами (управляющие сигналы для каждого из моторов) и 6 выходами-измерениями.
![]() (4)
(4)

 ,
,
 .
.
Передаточная матрица системы в данном случае будет иметь размерность
Предположим, что квадрокоптер неподвижно весит в воздухе. Величина управляющего сигнала в данном случае одинакова для каждого мотора и равняется, как было выяснено ранее, ![]() . Как видно из (3), чтобы, не потеряв горизонтального положения (
. Как видно из (3), чтобы, не потеряв горизонтального положения (![]() ), изменить лишь высоту, необходимо изменить управляющий сигнал для каждого мотора на одинаковую величину (обозначим
), изменить лишь высоту, необходимо изменить управляющий сигнал для каждого мотора на одинаковую величину (обозначим ![]() ). Если же поставлена задача изменить лишь угол крена
). Если же поставлена задача изменить лишь угол крена ![]() , то достаточно изменить
, то достаточно изменить ![]() и
и ![]() на одинаковую величину
на одинаковую величину ![]() с разным знаком. Аналогичная ситуация и с углом тангажа
с разным знаком. Аналогичная ситуация и с углом тангажа ![]() — необходимо изменить на одинаковую величину
— необходимо изменить на одинаковую величину ![]() с разным знаком управляющие сигналы для первого и третьего моторов. Для управления углом рысканья
с разным знаком управляющие сигналы для первого и третьего моторов. Для управления углом рысканья ![]() будем изменять мощности моторов на одинаковую величину
будем изменять мощности моторов на одинаковую величину ![]() в разную сторону, если они находятся на разных осях квадрокоптера. Таким образом, замена для вектора
в разную сторону, если они находятся на разных осях квадрокоптера. Таким образом, замена для вектора ![]() будет иметь вид:
будет иметь вид:
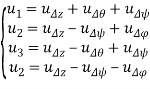 .(5)
.(5)
Подставив (5) в систему (3), получим в результате:
 (6)
(6)
Рассмотрим теперь систему (6). Как можно заметить, при переходе к модели в пространстве состояний, возможна её декомпозиция на 6 SISO-подсистем:
 ,
,  ,
,
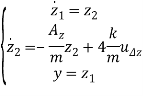 ,
,
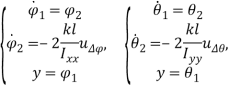
 .
.
Данные системы значительно удобнее использовать при работе с передаточными функциями, например, частотном анализе. Также, основываясь на вышеизложенных результатах, можно построить LQR-регулятор (с использованием асимптотических наблюдателей), который, к тому же, достаточно просто проверить на робастность.
Литература:
- Luukkonen T., Modelling and control of quadcopter, 2011, P.2–6.
