





В статье рассмотрен робот Blue Frog Buddy, который служит помощником в воспитании детей с аутизмом.
Ключевые слова: робот, руки, возможности
Компания Blue Frog Robotics, разработав персонального робота под названием Buddy, поставила себе задачу интегрировать в него приложения, что рассчитаны на помощь детям с аутизмом. Работая совместно с компанией Auticiel, разработано шесть приложений. Обе компании выражают заинтересованность в сотрудничестве для разработки нового приложения.
С помощью робота можно научить страдающих расстройствами аутистического спектра (и не только) детей взаимодействию с обществом и самостоятельности.
Ролевые игры и некоторые другие сценарии, отражающие процесс социального взаимодействия, помогут детям понять и развить базовые навыки, необходимые для общения и восприятия чувств окружающих.
Поведение робота, который реагирует на действия детей, мотивирует детей на взаимодействие с ним.
Buddy вызывает у детей неподдельное любопытство. Они удовлетворят свое любопытство, общаясь с роботом. Это помогает детям обратить свое внимание на внешний мир и взаимодействовать с ним. Благодаря тому, что Buddy никогда не злится и не устает, он становится лучшим другом ребенка, и продолжает развлекать своими историями и играми до тех пор, пока это интересно самому ребенку.
Новое приложение, разработанное для Buddy, позволит ему оказать помощь в понимании и освоении такой концепции, как время. Робот будет проводить напоминания и помогать разрабатывать расписания детям; оказывать помощь в выполнении запланированных действий; показывать таймеры и визуализировать течение времени; поощрять и мотивировать детей, достигших выполнения задачи.
К примеру, Buddy может сказать: «пришло время кушать, поэтому сейчас следует помыть руки». Он отобразит видео на своем лицевом дисплее, которое покажет, как правильно мыть руки, и таймер для этого занятия. Убедившись, что ребенок вымыл руки перед едой, Buddy «поздравит» его. Все параметры — видео, анимация таймеров и расписание, — полностью настраиваемые. Таким образом, можно использовать фотографии и видео, которые помогут создать нужную обстановку.
Buddy -великолепный инструмент для интеграции детей в социуме, так как стимулирует взаимодействие детей с окружающим миром, проявляя нейтральное и ободряющее отношение к нему.
Что еще умеет делать Buddy?
Buddy доступен и прост в использовании. Робот защищает ваш дом, развлекает ваших детей и помогает оставаться на связи с теми, кого вы любите.
Робот может видеть, слышать, говорить и делать соответствующие движения головой.
Buddy — ваш личный помощник. Он будет напоминать о важных делах и предстоящих событиях.
Buddy следит за вашим домом. Он будет охранять ваш дом, пока вы отсутствуете и уведомлять вас при обнаружении необычных явлений. Buddy — ваш помощник без рук. Он может предлагать рецепты, проигрывать любимую музыку и даже отвечать на ваши звонки.
Buddy — хороший друг и компаньон для игр с детьми. Он обучает ваших детей в процессе игры и весело проводит с ними время.
Buddy поможет дорогим вам людям быть ближе, он поможет установить связь с родными, близкими и друзьями.
Buddy сделает вашу повседневную жизнь более безопасной, легкой и забавной
Buddy — полностью мобильный робот. Оснащен 3-мя колесами и многочисленными датчиками, позволяющими роботу передвигаться, обучаться и взаимодействовать с окружающим миром.
Робот построен на модульной платформе, которую можно расширять при помощи аксессуаров.
Рис. 1. Робот Buddy
Предлагается произвести расчет структурного анализа рук манипулятора.
- Класс кинематических пар
Задачей структурного анализа является определение параметров структуры заданного механизма — число звеньев, структурных групп числа и вида кинематических пар, число подвижностей (основных и местных), число контуров и число избыточных связей.
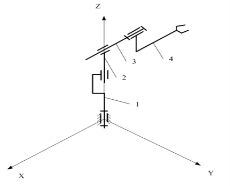
Рис. 2. Схема четырехзвенного манипулятора
У представленного механизма 4 подвижных звена: 1, 2, 3, 4.
– Начало системы координат и звено 1 образуют вращательную кинематическую пару А. Пара одноподвижная, число степеней свободы звена Н=1. Класс кинематической пары
S = 6-Н = 6–1 = 5.
– Звенья 1 и 2 образуют вращательную пару B. Пара одноподвижная, число степеней свободы Н=1.
S = 6-Н = 6–1 = 5.
– Звенья 2 и 3 образуют цилиндрическую пару С. Пара имеет две подвижности, число степеней свободы Н=1.
S = 6-Н = 6–1 = 5.
– Звенья 3 и 4 образуют вращательную пару D. Пара одноподвижная, число степеней свободы Н=1.
S = 6-Н = 6–1 = 5.
Рабочим органом (схватом) манипулятора является точка E.
Степень подвижности механизма определяется по формуле Чебышева для пространственных механизмов:
W=6*n– 6*p5=6*4–5*4= 4, (1)
где n — число звеньев, p5 — количество кинематических пар пятого класса.
Таким образом, для придания определенности движению манипулятора, следует задать движение всем четырем его звеньям.
Вывод: если у робота будут руки, то кроме перечисленных возможностей робот Buddy может выполнять соответствующие движения руками. Он сможет не только обучать детей в процессе игры, но и сам принимать участие в играх, сможет приносить и уносить предметы.
Наличие рук позволит роботу наиболее эффективно взаимодействовать с окружающим миром.
Литература:
- Поезжаева Е. В. // Промышленные роботы: учеб. пособие в 3 ч.-М.:Изд-во УМОАММВТУ им. Баумана; изд-во ПГТУ, 2009
- http://medgadgets.ru/shop/buddy-robot.html
