





Математическое моделирование короткозамкнутого асинхронного двигателя в пакете SimPowerSystems
Емельянов Александр Александрович, доцент;
Бесклеткин Виктор Викторович, ассистент;
Авдеев Александр Сергеевич, студент;
Габзалилов Эльвир Фиргатович, студент;
Прокопьев Константин Васильевич, студент;
Ситенков Александр Александрович, студент;
Пестеров Дмитрий Ильич, студент;
Юнусов Тимур Шамильевич, студент.
Российский государственный профессионально-педагогический университет
Целью данной работы является овладение технологией сборки модели асинхронного двигателя с короткозамкнутым ротором (АКЗ) в пакете SimPowerSystems для использования в лабораторной работе по дисциплине «Математическое моделирование в электромеханических устройствах».
Виртуальная модель для исследования прямого пуска АКЗ на холостом ходу с последующим приложением номинального момента показана на рис. 1 [1], [2].
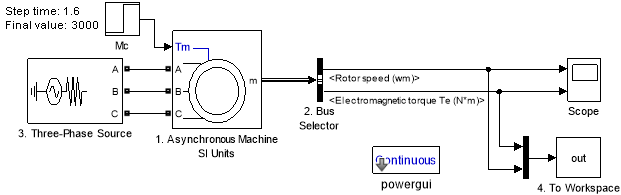
Рис. 1. Моделирование прямого пуска короткозамкнутого асинхронного двигателя в SimPowerSystems
Модель содержит трехфазную асинхронную машину (Asynchronous Machine SI Units), запитанную от трехфазного источника напряжения (Three-Phase Source), блок для измерения скорости и момента машины (Bus Selector), блок момента нагрузки (Step) и блоки измерения (Scope, To Workspace). Для работы модели в SimPowerSystems необходимо добавить блок Powergui. Данный блок, помещенный в модель, позволяет задать начальные значения переменных модели, выполнить расчет установившегося режима, осуществить инициализацию схемы, содержащей электрические машины, и найти полное сопротивление (импеданс) цепи.
При запуске модели осуществляется прямой пуск АКЗ, по истечении некоторого времени прикладывается момент нагрузки.
Рассмотрим подробнее алгоритм построения модели.
- Блок асинхронного двигателя (AsynchronousMachineSIUnits).
Находим в обозревателе библиотек блоков (Simulink Library Browser) библиотеку Simscape и раскрываем следующий путь до раздела Machines (рис. 2). Переносим блок Asynchronous Machine SI Units на рабочее поле сборки модели.
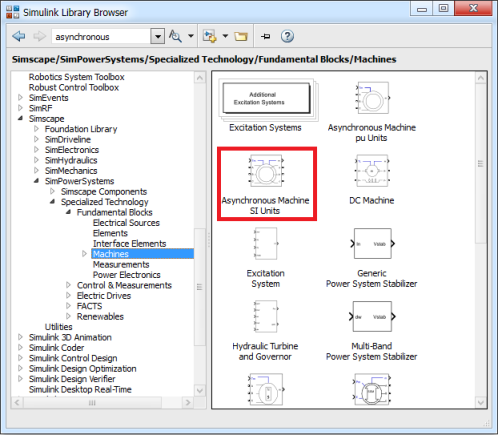
Рис. 2. Расположение блока Asynchronous Machine SI Units в окне библиотеки SimPowerSystems
Открываем блок асинхронного двигателя с короткозамкнутым ротором. Появится окно, в котором производим следующие действия:
− на вкладке «Конфигурация» (Configuration) в поле «Тип ротора» (Rotor type) выбрать беличью клетку (Squirrel-cage), в поле Squirrel-cage preset model установить значение «No», позволяющее изменение параметров двигателя (рис. 3,а);
− на вкладке «Параметры» (Parameters) устанавливаем параметры двигателя (рис. 3,б), например, J = 28.
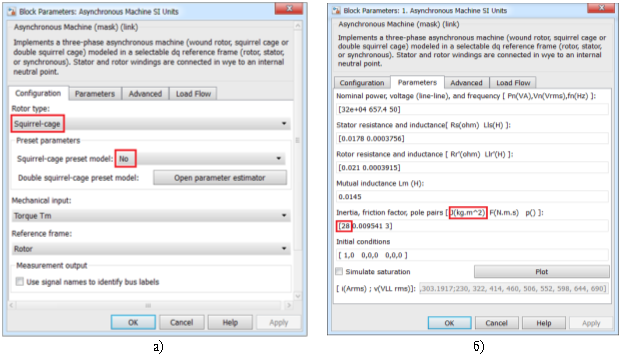 Рис. 3. а) вкладка «Конфигурация»; б) вкладка «Параметры»
Рис. 3. а) вкладка «Конфигурация»; б) вкладка «Параметры»
- Блок шинного селектора (BusSelector).
В библиотеке Simulink раскрываем следующий путь до группы блоков «Разводка сигнала» (Signal Routing) (рис. 4). Переносим блок Bus Selector на рабочее поле.
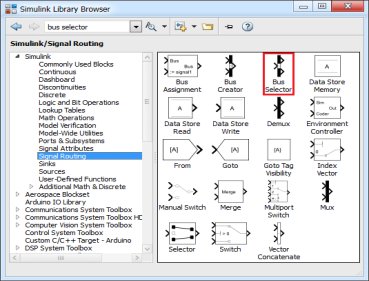
Рис. 4. Расположение блока Bus Selector в окне библиотеки Simulink
Открываем блок шинного селектора. Из списка механических характеристик (Mechanical) выбираем электромагнитный момент (Electromagnetic torque Te (N*m)) и скорость вращения ротора (Rotor speed (wm)) и добавляем их в список выбранного (Selected signals) кнопкой Select (рис. 5).
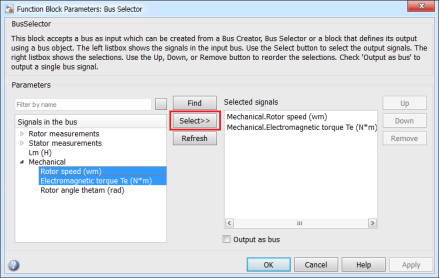
Рис. 5. Выбор характеристик в блоке Bus Selector
- Блок «Трехфазный источник питания» (Three-PhaseSource).
Находим в Simulink Library Browser библиотеку Simscape и раскрываем следующий путь до источников электрической энергии (Electrical Sources) (рис. 6). Переносим блок Three-Phase Source на рабочее поле.
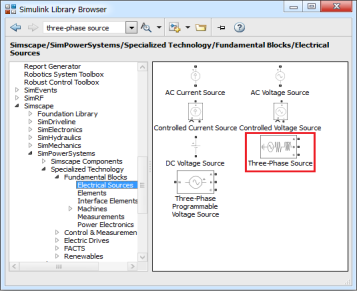
Рис. 6. Расположение блока Three-Phase Source в окне библиотеки SimPowerSystems
Открываем блок трехфазного источника питания. Появляется окно, в котором устанавливаем следующие параметры (рис. 7):
− фазное напряжение (Phase-to-phase voltage, Vrms): 660;
− частота (Frequency, Hz): 50;
− сопротивление источника питания (Source resistance, Ohms): 0.0029;
− индуктивность источника питания (Source inductance, H): 0.
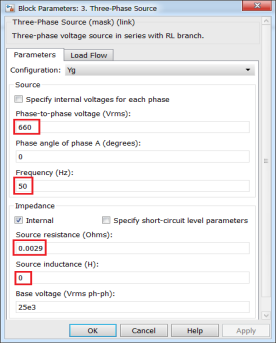
Рис. 7. Установка параметров источника питания
- Блок сохранения данных в рабочей области (ToWorkspace).
В библиотеке блоков Simulink раскрываем следующий путь до раздела «Приемники сигнала» (Sinks) (рис. 8). Переносим блок To Workspace на рабочее поле.
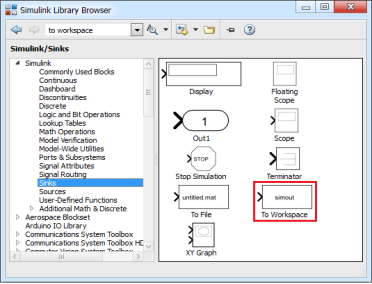
Рис. 8. Расположение блока To Workspace в окне библиотеки Simulink
Открываем блок To Workspace. Вводим следующие параметры (рис. 9):
− имя переменной (Variable name): out;
− формат сохранения данных (Save format): Array;
− способ сохранения сигналов (Save 2-D signals as): Inherit from input;
− снять галочку с Log-fixed point data as fi object.
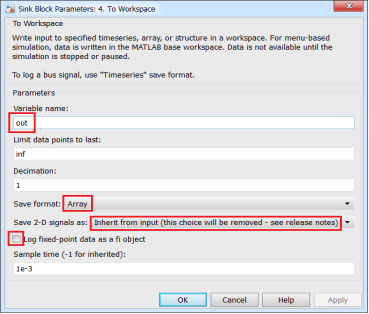
Рис. 9. Установка параметров блока To Workspace
Результаты моделирования прямого пуска асинхронного двигателя с короткозамкнутым ротором в SimPowerSystems даны на рис. 10, которые совпадают с результатами расчетов, приведенных в статье [4].
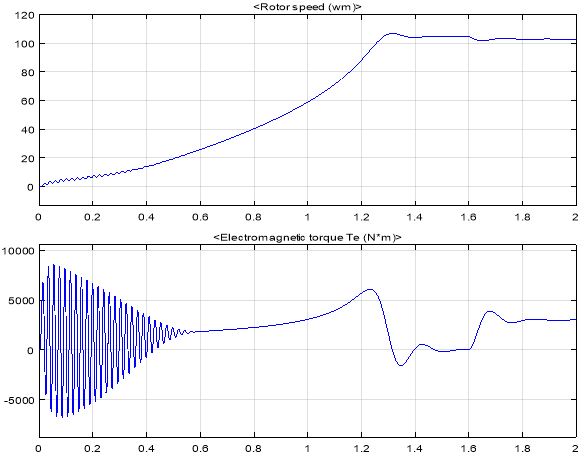
Рис. 10. Скорость и электромагнитный момент при прямом пуске асинхронного двигателя с короткозамкнутым ротором
Примечания:
- Во избежание ошибок при запуске расчета модели необходимо открыть меню Simulation, выбрать Model Configuration Parameters. В открывшемся окне в меню Diagnostics перейти к пункту Connectivity и установить значение Mux blocks used to create bus signals: error, как показано на рис. 11.
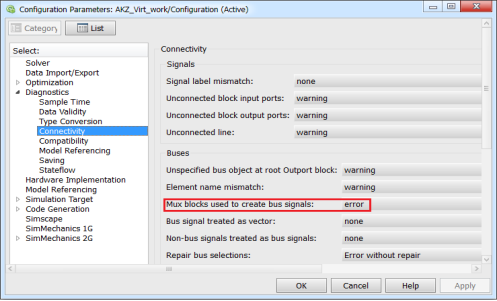
Рис. 11. Окно параметров модели
- Паспортные данные двигателя приняты из работы [3].
Номинальные данные:
Номинальный режим работыS1;
Номинальная мощность![]()
Номинальное фазное напряжение![]()
Номинальный фазный ток![]()
Номинальная частота![]()
Номинальная синхронная скорость![]()
Номинальная скорость ротора![]()
Номинальный КПД
Номинальный коэффициент мощности![]()
Число пар полюсов![]()
Параметры Т-образной схемы замещения при номинальной частоте:
Активное сопротивление обмотки статора![]()
Индуктивное сопротивление рассеяния обмотки статора![]()
Активное сопротивление обмотки ротора, приведенное к статору![]()
Индуктивное сопротивление рассеяния обмотки ротора, приведенное статору![]()
Главное индуктивное сопротивление![]()
Индуктивность рассеяния обмотки статора![]()
Индуктивность рассеяния обмотки ротора![]()
Суммарный момент инерции двигателя и механизма
Литература:
- Герман-Галкин С.Г. Matlab & Simulink. Проектирование мехатронных систем на ПК. – СПб.: КОРОНА-Век, 2008. – 368 с.
- Герман-Галкин С. Г. Компьютерное моделирование полупроводниковых систем в MATLAB 6.0: Учебное пособие. – СПб.: КОРОНА принт, 2007. – 320 с.
- Шрейнер Р. Т. Электромеханические и тепловые режимы асинхронных двигателей в системах частотного управления: учеб. пособие / Р. Т. Шрейнер, А. В. Костылев, В. К. Кривовяз, С. И. Шилин. Под ред. проф. д. т. н. Р. Т. Шрейнера. - Екатеринбург: ГОУ ВПО «Рос. гос. проф.-пед. ун-т», 2008. – 361 с.
- Емельянов А. А., Бесклеткин В. В., Авдеев А. С., Габзалилов Э. Ф., Аюпов В. И., Федоров А. П., Прокопьев К. В., Ситенков А. А., Бурхацкий В. В. Математическая модель асинхронного двигателя с переменными ΨR - IS в системе абсолютных единиц на основе интегрирующих звеньев // Молодой ученый. — 2016. — №11. — С. 85-101.
