





В данной статье речь пойдёт о распознавании проекции асфальтового покрытия в потоке квазистационарных аэровидеоизображений, получаемых с помощью квадрокоптера [1] в рамках поиска подходов к решению проблемы транспортных заторов крупных мегаполисов (в частности о сборе статистических сведений о параметрах транспортных потоков, а также компрессии изображений с целью их более эффективной передачи между отдельными узлами соответствующей информационно-измерительной системы).
Отметим, что с точки зрения сбора статистических сведений о параметрах транспортного потока, знание положения асфальтовой проекции сужает область поиска проекции движущихся автомобилей (так как очевидно, что автомобильные проекции должны быть сосредоточены в области дорожной проекции). Благодаря распознаванию проекции трассы по цифровым изображениям [2], алгоритм выявления автомобильных проекций одновременно становится более точным и менее времязатратным.
С другой стороны, поскольку с момента распознавания асфальтовой проекции, кодировать (сжимать по объёму) [3] и передавать на расстояние можно уже не весь кадр целиком, а только его интересующую часть с автомобильными проекциями, то, в первом приближении, объём передаваемых кодов может быть снижен примерно в 2–3 раза.
Таким образом, знание положения проекции асфальтового покрытия в потоке кадровых изображений благоприятно сказывается как на сборе статистических сведений, так и на процесс кодирования — декодирования видеоизображений транспортных потоков.
Для того чтобы обособить проекцию автотрассы и выделить её среди других ошибочных проекций был разработан высокоточный метод формирования бинарной маски проекции автотрассы.
В основе метода лежит сочетание блочного и пиксельного представления кадров. Суть такого разбиения состоит в том, что одни возникающие попутно подзадачи удобнее решать на блочном уровне, а другие на пиксельном.
Подчеркнём, что независимо от способа разбиения, и пиксельная, и блочная маски являются бинарными, что в символьном виде можно записать как:
 (1)
(1)
где: Y — пиксельная маска; M — блочная маска; i,j — индексы пиксела в кадре; k,l — индексы блока в кадре.
При блочном представлении весь кадр логически разбивается на квадратные области (блоки) одинакового размера (рис. 1.). При этом каждая цветовых матриц кадра становится блочной, а в качестве элементов этой матрицы вместо пикселов выступают блоки.
Блочный вид используется для выделения внутренней части проекции асфальтового покрытия, то есть той её части, которая заключена между верхней и нижней границами проекции асфальтового покрытия.
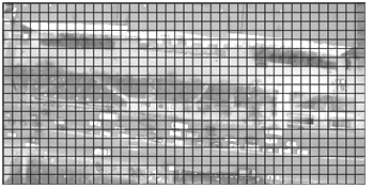
Рис. 1. Блочное представление кадра
Бинарная макса в предложенном методе формируется постепенно за счёт движущихся автомобилей. Удобство перехода от пиксельного представления кадра к блочному, в рамках указанной задачи, объясняется тем, что автомобильные проекции не могут обозначить движением каждый пиксел дорожной проекции в течение короткого промежутка времени. Для того чтобы это сделать, пришлось бы ждать, пока в каждой точке проекции асфальтового покрытия побывает проекция движущегося автомобиля.
Между тем, даже в случае довольно длительного времени съёмки и обработки кадровой очереди, между выделенными областями остаются зазоры, которые чётко прослеживаются на бинарной маске (рис. 2.).
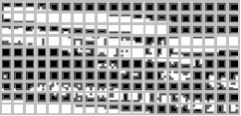
Рис. 2. Фрагмент бинарной маски изображения в блочном виде
Отсюда можно сделать вывод, что внутренние фрагменты проекции автотрассы удобнее выделять не отдельными пикселами, а крупными блоками. В разработанном методе решение о смене статуса блока принимается по статистическим данным его же вложенных пикселов. При этом, внутриблочная коррекция, проводимая для каждого текущего блока, реализуется согласно формуле:
 (2)
(2)
где: N — размерность квадратных блоков в пикселах; p1 — пороговый уровень вероятности смены статуса блока при проведении внутриблочной коррекции. При этом очевидно, что результат выражения в левых частях неравенств принадлежит непрерывному диапазону [0,1].
В ходе реализации указанной математической модели внутриблочной коррекции, алгоритмом последовательно перебираются все пикселы текущего блока, а по её результатам сразу весь текущий блок (то есть все его пикселы) может быть признан принадлежащим дорожной проекции (значение 1), либо не принадлежащим ей (значение 0).
Таким образом, внутриблочная пиксельная коррекция разделяет все блоки стабилизированной части кадра на принадлежащие проекции асфальтового покрытия и не принадлежащие ей (рис. 3.).
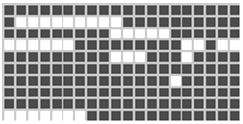
Рис. 3. Фрагмент бинарной маски проекции автотрассы в блочном виде после внутриблочной коррекции
Очевидно, что чем большим по размерам является блок, тем точнее будет проведена внутриблочная коррекция, поскольку с ростом размерности блока количество пикселов в нём (количество опорных точек для статистики) возрастает по квадратичной зависимости.
Стоит отметить также, что внутриблочная коррекция служит не только для выделения внутренней части проекции асфальтового покрытия, но и способствует также удалению «ложных» пиксельных скоплений, изначально признанных принадлежащими проекции автотрассы.
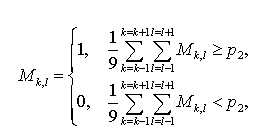
Процесс формирования маски проекции автотрассы удалось ускорить при дополнительном использовании межблочной коррекции, проводимой сразу после внутриблочной и аналогично ей, за исключением того, что теперь уже перебираются не пикселы внутри блока, а соседние блоки. Межблочная коррекция ведётся согласно формуле:
 (3)
(3)
где: p2 — пороговый уровень вероятности смены статуса блока при проведении межблочной коррекции. В цикл перебора входит сам текущий блок, а также восемь его ближайших соседей. Этим обуславливается наличие в расчётных формулах множителя 1/9.
Действие межблочной коррекции основано на том, что согласно статистике, блоки, окружённые блоками проекции автотрассы, сами признаются принадлежащими этой проекции. Область асфальтовой проекции при этом дополнительно расширяется (рис. 4.).
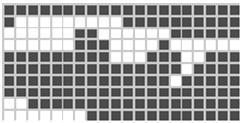
Рис. 4. Фрагмент бинарной маски проекции автотрассы в блочном виде после межблочной коррекции
Таким образом, посредством использования пиксельной и блочной бинарных масок движения в изображении, а также посредством использования внутриблочной и межблочной коррекций итоговой маски, оказалось возможным выделение проекции дорожного покрытия среди прочих областей кадра. Причём, согласно усреднённым экспериментальным данным, для такого выделения достаточно иметь кадровый видеоряд, продолжительность всего 2–2,5 мин.
Литература:
1. Минаков Е.И., Калистратов Д. С. Метод геометрической стабилизации квазистационарных аэровидеоизображений в информационно-измерительных системах видеомониторинга / Е. И. Минаков, Д. С. Калистратов // Вестник компьютерных и информационных технологий, — 2016. — № 4 — С. 46–49.
2. Анисимов Б.В., Курганов В. Д., Злобин В. К. Распознавание и цифровая обработка изображений: Учеб. пособие для студентов вузов / Б. В. Анисимов, В. Д. Курганов, В. К. Злобин. М.: Высш. шк., 1983. 295 с.
3. Ричардсон Я. Видеокодирование. Н.264 и МРЕG-4 — стандарты нового поколения. — М.: Техносфера, 2005. — 368 с.
