





Математическое моделирование электропривода на базе гибридного шагового двигателя в пакете SimPowerSystems
Емельянов Александр Александрович, доцент;
Бесклеткин Виктор Викторович, ассистент;
Авдеев Александр Сергеевич, студент;
Габзалилов Эльвир Фиргатович, студент;
Прокопьев Константин Васильевич, студент;
Ситенков Александр Александрович, студент;
Пестеров Дмитрий Ильич, студент;
Юнусов Тимур Шамильевич, студент;
Устинов Артем Павлович, студент
Российский государственный профессионально-педагогический университет
Целью данной работы является овладение технологией сборки модели электропривода на базе гибридного шагового двигателя в пакете SimPowerSystems для использования в лабораторной работе по дисциплине «Математическое моделирование в электромеханических устройствах» [1], [2], [3], [4], [5].
На рис. 1 показана схема электропривода на базе гибридного шагового двигателя.
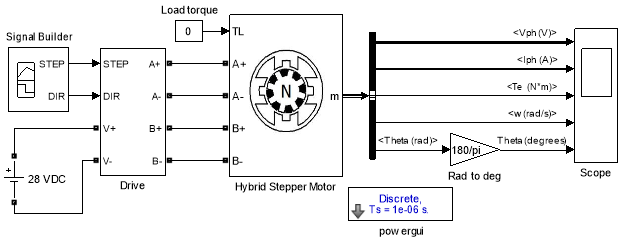
Рис. 1. Электропривод на базе гибридного шагового двигателя
Шаговый двигатель управляется сигналами STEP и DIR, поступающими из блока Signal Builder (рис. 2). Сигнал STEP регулирует угловые перемещения шагового двигателя: при единичном сигнале происходит ступенчатый сдвиг (шаг) поворота ротора, при нулевом – остановка. Сигнал DIR регулирует направление перемещения ротора: 1 – прямое, 0 – обратное.
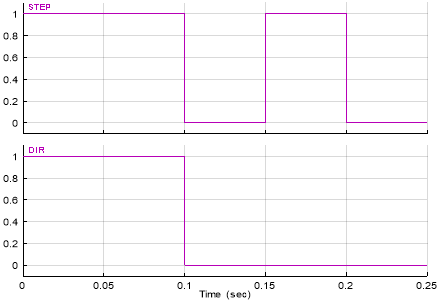
Рис. 2. Задание сигналов STEP и DIR в Signal Builder
Блок шагового двигателя (Stepper Motor) необходимо перенести из библиотеки SimPowerSystems (раздел Specialized Technology/Fundamental Blocks/Machines) на рабочее поле модели, в блоке выбрать тип двигателя – гибридный (Hybrid), число фаз – 2 и задать остальные параметры, указанные на рис. 3.
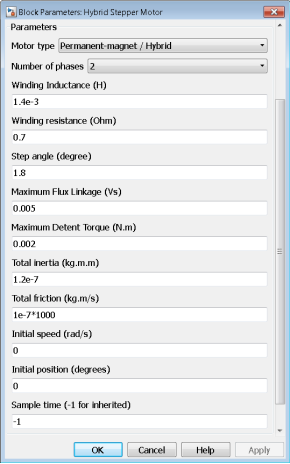
Рис. 3. Окно параметров гибридного шагового двигателя (Hybrid Stepper Motor)
Блок Drive представлен на рис. 4.
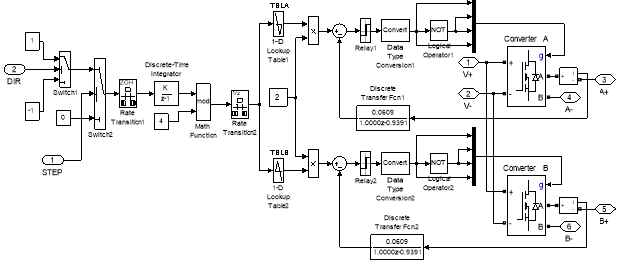
Рис. 4. Блок Drive
В параметрах переключателей Switch1 и Switch2 необходимо установить значение Threshold: 0.5. В блоке Math Function выбрать функцию mod. В блоках Logical Operator установить оператор NOT.
В блоке Discrete-time integrator задать:
− Integrator method: Accumulation Forward Euler;
− Initial condition setting: Output;
− Sample time: round(1/500/Ts)*Ts.
В свойствах константы со значением 4, подводимой к блоку Math Function, также должен быть установлен параметр Sample time: round(1/500/Ts)*Ts.
Параметры элементов TBLA и TBLB (блоки 1-D Lookup Table 1 и 2) представлены на рис. 5.
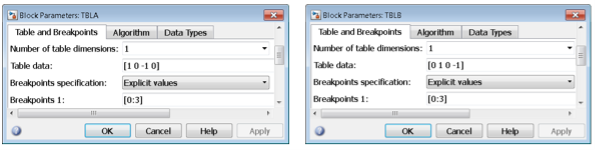
Рис. 5. Параметры блоков TBLA и TBLB
Параметры блоков Relay:
− switch on point: 0.01;
− switch off point: -0.01;
− output when on: 1;
− output when off: 0;
− input processing: Inherited.
В свойствах блоков Discrete Transfer Fcn необходимо задать:
− Числитель (Numerator): [0, 0.0609];
− Знаменатель (Denominator): [1.0000, -0.9391].
Converter A и Converter B представлены блоками Universal Bridge, их параметры даны на рис. 6.
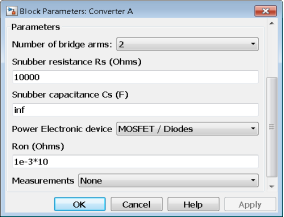
Рис. 6. Параметры блоков Converter A и Converter B
Для работы модели в SimPowerSystems необходимо добавить блок Powergui, в котором необходимо установить следующие параметры:
− Simulation type: Discrete;
− Solver type: Tustin/Backward Euler (TBE);
− Sample time: Ts.
Результаты математического моделирования шагового двигателя в SimPowerSystems приведены на рис. 7, 8, 9 и 10.
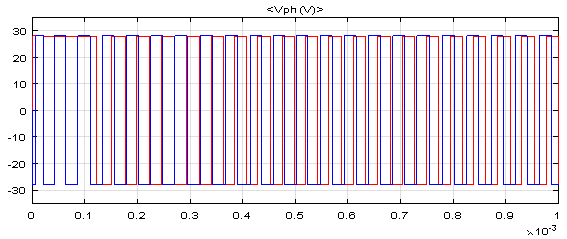
Рис. 7. Напряжения на двух обмотках шагового двигателя
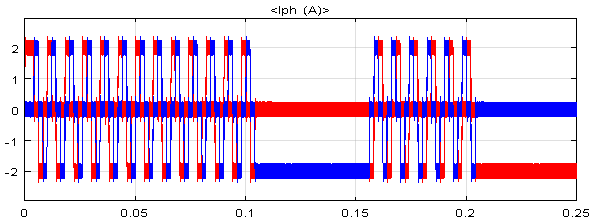
Рис. 8. Токи на двух обмотках шагового двигателя
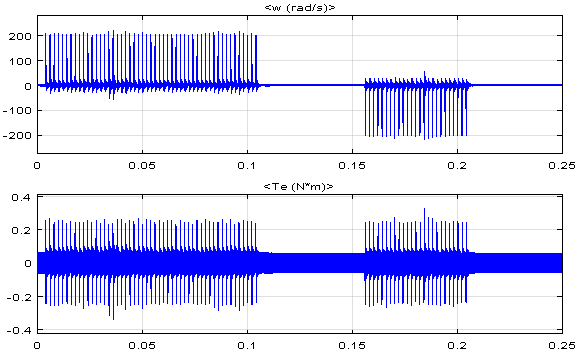
Рис. 9. Скорость и электромагнитный момент шагового двигателя
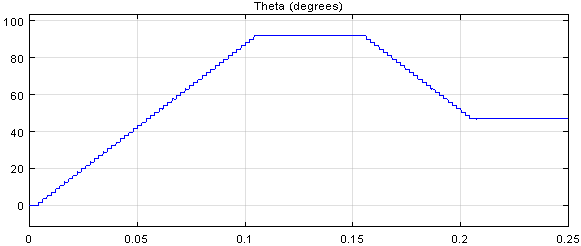
Рис. 10. Угол поворота на валу шагового двигателя
Примечание: во избежание ошибок при запуске расчета модели необходимо открыть меню Simulation, выбрать Model Configuration Parameters. В открывшемся окне в меню Diagnostics перейти к пункту Connectivity и установить значение Mux blocks used to create bus signals: error, как показано на рис. 11.
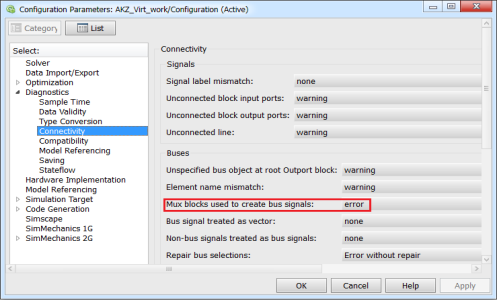
Рис. 11. Окно параметров модели
Литература:
- Герман-Галкин С. Г. Matlab & Simulink. Проектирование мехатронных систем на ПК. – СПб.: КОРОНА-Век, 2008. – 368 с.
- Герман-Галкин С. Г. Компьютерное моделирование полупроводниковых систем в MATLAB 6.0: Учебное пособие. – СПб.: КОРОНА принт, 2007. – 320 с.
- Черных И. В. Моделирование электротехнических устройств в MATLAB, SimPowerSystems и Simulink. – М.: ДМК Пресс; СПб.: Питер, 2008. – 288 с.
- Simscape Power Systems Examples [Электронный ресурс] // MathWorks. – Режим доступа: www.mathworks.com/help/physmod/sps/examples.html.
- Емельянов А. А., Бесклеткин В.В., Авдеев А. С., Габзалилов Э. Ф., Прокопьев К. В., Ситенков А. А., Пестеров Д. И., Юнусов Т. Ш. Математическое моделирование короткозамкнутого асинхронного двигателя в пакете SimPowerSystems // Молодой ученый. — 2016. — №14. — С. 28-34.
