




Важность решения проблемы обеспечения безопасности и живучести при создании систем автоматизированного управления сортировочной горкой (СГ) трудно переоценить. В процессе управления роспуском составов значимую роль в настоящее время играет человек, привносящий в процедуру управления скатыванием отцепов присущие ему недостатки: эмоциональность, ограниченные возможности по скорости счета, охвату числа контролируемых и управляемых факторов, предрасположенность к уставанию и, часто, непрофессионализм /1/.
Управлять живучестью и безопасностью можно на основе совершенствования различных сфер и направлений деятельности: технической, технологической, организационной. Разработка новых технических средств, их резервирования – традиционный путь повышения технической составляющей живучести и безопасности сортировочного процесса.
В качестве технологических усовершенствований процедуры управления роспуском составов на СГ можно предложить следующую идеологию: согласовывать скорость роспуска составов с загрузкой парка приема станции, с одной стороны, и возможностями парка отправления, с другой. Если нет настоятельной потребности по первому условию (парк приема не загружен) или ограничены возможности по второму (парк отправления «забит» неотправленными составами), то и нет необходимости увеличивать скорость роспуска составов на СГ, что ведет к снижению живучести и безопасности процесса. В результате этого согласования происходит увеличение параметров живучести и безопасности без ухудшения показателей перевозочного процесса в целом по сортировочной станции.
В решении задачи повышения безопасности и живучести сортировочного процесса важна роль математических методов, позволяющих перевести исследование в плоскость формализованных подходов и с системных позиций /2/.
Введем для дальнейшего исследования заданного объекта два показателя безопасности: fтб – технологической безопасности, fэб – экономической безопасности, и один показатель живучести fж , как функции средней скорости роспуска отцепов v на СГ. Все три показателя примем нормированными на отрезке от 0 до 1 включительно.
Несложные рассуждения позволяют предположить вид и параметры этих зависимостей. Введем двумерное признаковое пространство исследования v0f (см. рис. 1).
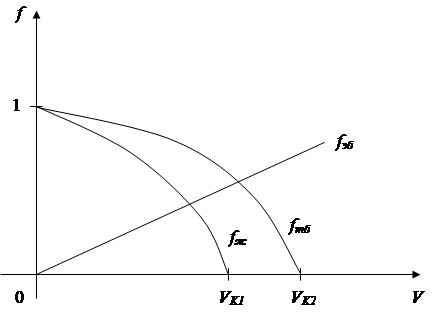
Рис. 1. – Графическое представление живучести fж , технологической fтб и экономической fэб безопасности роспуска в зависимости от ее скорости
Очевидно, что двум искомым графикам fтб(v) и fж(v) принадлежат точки (0, 1) и (vк, 0) этого пространства. Рассматриваемые функции убывающие, причем с увеличением скорости роспуска темп их убывания возрастает. Это позволяет предположить квадратичную зависимость v от f. На рисунке схематично представлены искомые зависимости. Они полностью определяются следующими параметрами:
- vк1 - для показателя живучести;
- vк2 - для показателя безопасности.
Иными словами: мы предположили наличие двух критических средних скоростей роспуска vк1 и vк2 при которых теряется живучесть системы и ее безопасность, что подтверждается практическими наблюдениями.
На рисунке изображено vк1 меньше vк2 . Действительно, как правило, вначале теряется живучесть системы, а затем возникают проблемы с ее безопасностью.
Аналитический вид исследуемых параметров достаточно просто определяется из высказанных предположений. Имеем:
fтб(v)=(( vк2 - v )/ vк2)0,5 и fж(v)=(( vк1 - v )/ vк1)0,5 (1)
При нулевой скорости роспуска экономическая безопасность fэб(v) принимает минимальное нулевое значение (требуются нерыночные, реанимационные меры), то есть fэб(0) = 0, и растет пропорционально скорости, таким образом, вид этой линии – прямая, выходящая из начала координат:
fэб(v) = аv . (2)
Значения критических скоростей vк1 и vк2 задают эксперты – горочные операторы (в работающей системе они могут быть скорректированы на основе анализа статистики работы СГ), а параметр а в соотношении (2) определяется рыночными ценами на услуги транспортной системы.
Таким образом, появляется возможность перейти к математическим формализмам теории многокритериальной оценки транспортных процессов на СГ.
Проиллюстрируем возможность использования математических методов многокритериального анализа и управления живучестью и безопасностью процесса скатывания отцепов на примере следующих данных (экспертная оценка):
vк1 =5, vк2 = 7, а = 0,2 , (3)
рассматривая в качестве критериев Ji работы сортировочной системы, введенные выше показатели:
J1 = fж(v), J2 = fтб(v) , J3 = fэб(v). (4)
Решаются следующие задачи.
1. При назначенном значении одного критерия (модифицированный метод главного критерия) рассчитываются наилучшие остальные показатели работы. Например, пусть требуется обеспечить живучесть системы не менее J1 =0,8, тогда скорость роспуска не должна превышать значения v=1,8, а значения остальных критериев соответственно будут равны J2 = 0,86, J3 = 0,36. Это их максимально возможные значения, то есть решалась задача максимизации J2 или J3 при ограничении на значение J1.
2. Осуществляется аддитивная свертка критериев J1, J2 и J3 при заданных значениях весовых коэффициентов: а1 = 1, а2 = 0, а3 = 1. Требуется найти решение, доставляющее максимум обобщенного критерия J0.
Результаты расчетов по (1) – (3) сведены в таблицу 1.
Таблица 1. – Свертка критериев
|
N |
V |
J1 |
J3 |
J0 |
|
|
5,0 |
0.53 |
1,00 |
1,53 |
|
1 |
5,5 |
0,46 |
1,10 |
1,56 |
|
2 |
6,0 |
0,38 |
1,20 |
1,58 |
|
3 |
6,5 |
0,27 |
1,30 |
1.57 |
|
|
6,7 |
0,11 |
1,44 |
1,55 |
|
4 |
7 |
0 |
1,4 |
1,4 |
Анализируя последний столбец табл. 1, легко определить зону предпочтительного управления. Это скорость роспуска v = 6 м/с.
Перейдем далее к учету организационных и экономических факторов в задаче повышения безопасности и живучести.
Рассмотрим два фактора, существенным образом влияющие на экономическую безопасность предприятия. Это прибыль P , получаемая предприятием, и себестоимость транспортной услуги S. Используем развиваемый в работе многокритериальный подход к оценке живучести и безопасности. В соответствии с выделенными факторами введем критерии. Так как прибыль и себестоимость имеют различный масштаб и размерность, предварительно нормируем их, сведя к интервалу [0, 1]. Формулы:
J1 = (P - minP)/(maxP - minP) и J1 = (S - min S)/(max S - min S) (5)
определяют вид и параметры вновь введенных критериев, безразмерных и изменяющихся на интервале [0, 1].
Далее считаем указанную процедуру выполненной.
Данные, отражающие статистику наблюдений зависимости критериев от скорости, имеют вид таблицы 2 (точки на рис. 2).
Таблица 2. – Результаты анализа зависимости значений критериев от скорости скатывания отцепов
|
v Ji |
1,5 |
2 |
2,5 |
3 |
3,5 |
4 |
4,5 |
|
J1 |
0,32 |
0,55 |
0,68 |
0,84 |
0,94 |
0,98 |
1,00 |
|
J2 |
0,02 |
0,04 |
0,08 |
0,14 |
0,25 |
0,36 |
0,50 |
Она позволяет, используя, например, МНК, построить аналитические зависимости исследуемых критериев. Первый критерий (прибыль) имеет вид:
J1 = – 0,4 + 0,56v – 0,05 v2 , (6)
второй (себестоимость) задается выражением:
J2 = 0,12 – 0,14v + 0,05 v2 . (7)
Смотри сплошные линии на рис. 2.
Если задать ограничения, определяющие заданные факторы экономической безопасности предприятия:
J1 = P > 0,6, J2 = S < 0,4, (8)
то из (6) и соотношения (8) следует интервал допустимых скоростей (2,2; 9), а из (7) и (8) следует допустимая область (0; 3,96).
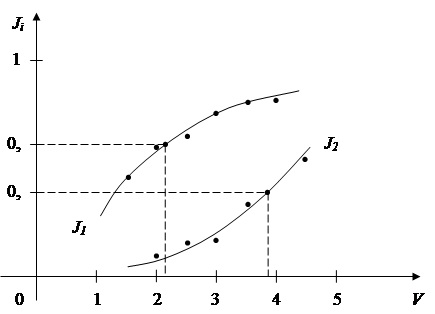
Рис. 2. – графическое представление критериев живучести и безопасности
Пересечение этих интервалов дает промежуток скоростей безопасного роспуска, согласованных по обоим критериям (2,2; 3,96). Исходя из требования максимальной живучести (иначе, минимизируя вероятность выхода за «ненадежные» границы допустимой области), оптимальным считаем середину найденного интервала, то есть v=3,08 м/сек.
Применим этот же метод алгоритмической надежности, не переходя к аналитическим соотношениям (6) и (7) непосредственно по данным таблицы 2.
Скорости 1,5 м/c и 2 м/c «выпадают» из рассмотрения, как не удовлетворяющие первому требованию (8), скорость 4,5 м/c не удовлетворяют второму требованию. Из оставшихся учитываемых дискретных скоростей: 2,5 м/c, 3 м/c и 3,5 м/c, 4 м/c следует выбрать среднее, то есть 3 м/c или 3,5 м/c, а точнее 3,25 м/c, что вполне удовлетворительно соответствует первому расчету.
Литература:
1. Емельянов А.М., Котик М.А. Ошибки человека-оператора (психологический и кибернетический аспекты). – М.: Знание. 1987. – 64 с. (Новое в жизни, науке, технике; Сер. «Транспорт». № 12).
2. Лябах Н.Н., Шабельников А.Н. Техническая кибернетика на железнодорожном транспорте: Учебник. – Ростов-на-Дону: Издательство СКНЦ ВШ, 2002. – 283 с.
