





Целью данной работы является овладение технологией сборки модели электропривода на базе бесконтактного двигателя постоянного тока (БДПТ)в пакете SimPowerSystems для использования в лабораторных работах по дисциплинам «Математическое моделирование электромеханических систем» и «Электрический привод».
За основу принята математическая модель из электронного ресурса [1]. Показаны пути поиска разделов необходимых элементов схемы электропривода, позволяющих студентам без больших потерь времени получить необходимые характеристики. Полезные рекомендации по работе в SimPowerSystems даны в работах [2], [3], [4], [5].
Общая схема модели приведена на рис. 1.
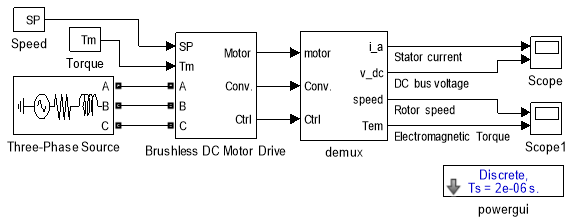
Рис. 1. Общая схема модели электропривода на базе БДПТ
Задание скорости (Speed) и наброс нагрузки (Torque) представлены в блоках Subsystem (библиотека Simulink/Ports & Subsystems) и показаны на рис. 2.

Рис. 2. Задание скорости (а) и наброс нагрузки (б)
В блоках Digital Clock (библиотека Simulink/Sources) в поле Sample time необходимо задать параметр Ts. В блоках 1-D Lookup Table 1 и 2 (Simulink/Lookup Tables) задать значения параметров Table data и Breakpoints 1, как показано на рис. 3.
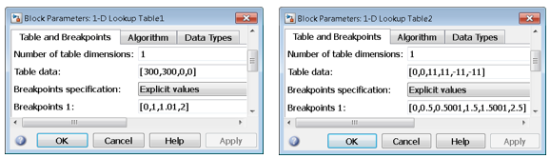
Рис. 3. Параметры блоков 1-D Lookup Table 1 и 2
Трехфазный источник напряжения (Three-Phase Source) находится в разделе Electrical Sources библиотеки SimPowerSystems (Simscape) (рис. 4). Его параметры представлены на рис. 4.
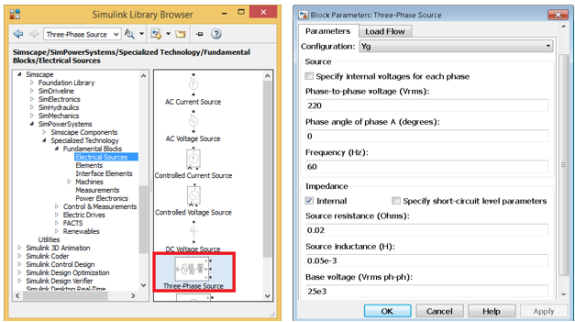
Рис. 4. Расположение и параметры блока Three-Phase Source
Демультиплексор (demux) собран в блоке Subsystem и показан на рис. 5.
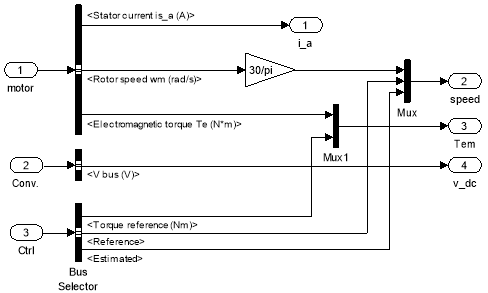
Рис. 5. Схема блока demux
В блоке Bus Selector (библиотека Simulink/Signal Routing) необходимо в списке сигналов (Signals in the bus) выбрать характеристики Torque reference, Reference и Estimated, после чего добавить их в список выбранного (Selected signals) кнопкой Select (рис. 6).
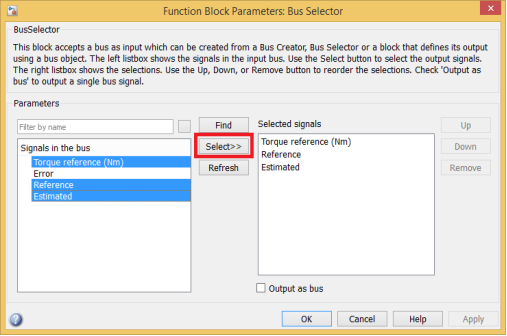
Рис. 6. Выбор характеристик в блоке Bus Selector
Для работы модели потребуется блок Powergui (раздел Fundamental Blocks библиотеки SimPowerSystems), параметры которого приведены на рис. 7.
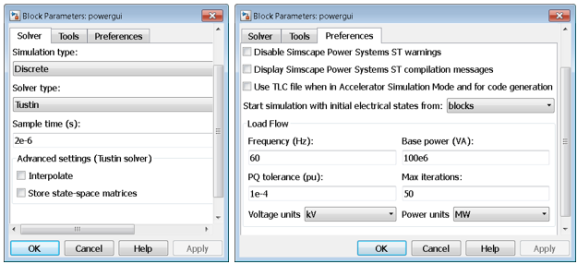
Рис. 7. Параметры блока Powergui
Подробно рассмотрим блок Brushless DC Motor Drive, структура которого приведена на рис. 8.
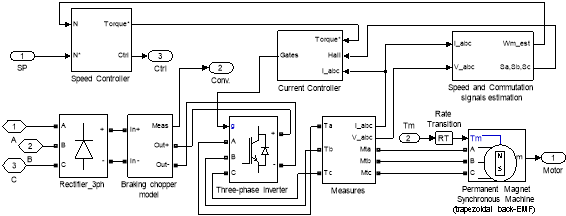
Рис. 8. Структура блока Brushless DC Motor Drive
- Блок регулятора скорости (SpeedController).
Модель регулятора скорости приведена на рис. 9.
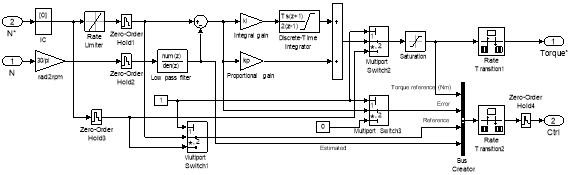
Рис. 9. Регулятор скорости (Speed Controller)
Все элементы на рис. 9 находятся в следующих разделах библиотеки Simulink:
− Discontinuities: блоки Rate Limiter и Saturation;
− Discrete: блоки Zero-Order Hold, Discrete-Time Integrator, элемент Low pass filter (блок Discrete Transfer Fcn);
− Signal Attributes: блоки IC и Rate Transition;
− Signal Routing: блоки Multiport Switch и Bus creator.
Параметры элементов регулятора скорости приведены в табл. 1 и на рис. 10, 11, 12.
Таблица 1
|
Элемент |
Параметр |
Значение |
|
IC |
Initial value |
0 |
|
rad2rpm |
Gain |
30/pi |
|
Zero-Order Hold 1, 2, 3 |
Sample time |
Tsc |
|
Zero-Order Hold 4 |
Sample time |
Ts |
|
Integral gain |
Gain |
ki |
|
Proportional gain |
Gain |
kp |
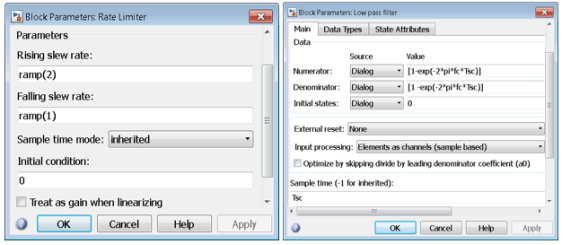
Рис. 10. Параметры блоков Rate Limiter и Low pass filter
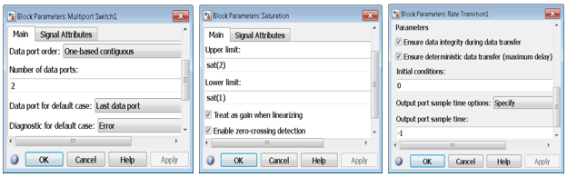
Рис. 11. Параметры блоков Multiport Switch 1, 2 и 3, блока Saturation и блоков Rate Transition 1 и 2

Рис. 12. Параметры блока Discrete-Time Integrator
- Блок трехфазного выпрямителя (Rectifier_3ph).
Трехфазный выпрямитель (Rectifier_3ph) представлен блоком Universal Bridge из раздела Power Electronics библиотеки SimPowerSystems (рис. 13). Его параметры даны на рис. 13.
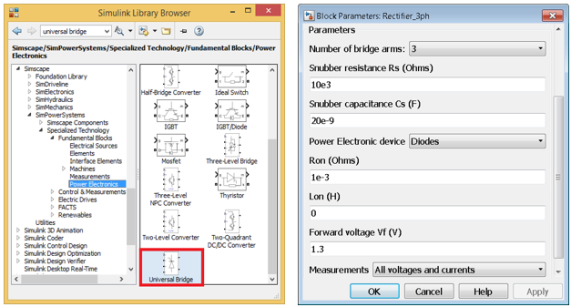
Рис. 13. Расположение блока Universal Bridge и параметры трехфазного выпрямителя
- Блок тормозного прерывателя (BrakingChopper).
Структура модели тормозного прерывателя (Braking chopper model) представлена на рис. 14. Блоки Capacitive DC bus with braking chopper и Braking chopper даны на рис. 15.
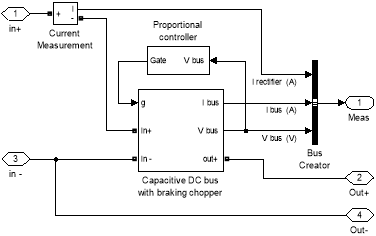
Рис. 14. Модель тормозного прерывателя (Braking сhopper model)
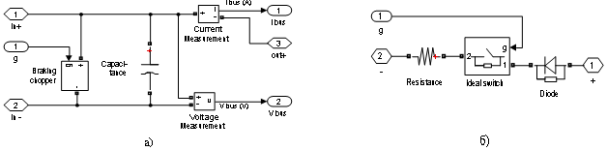
Рис. 15. Блоки Capacitive DC bus with braking chopper (а) и Braking chopper (б)
Блоки Current Measurement и Voltage Measurement расположены в разделе Measurements библиотеки SimPowerSystems, блоки Ideal Switch и Diode в разделе Power Electronics (рис. 16). Порты подключения (Connection Port) находятся в разделе Elements.
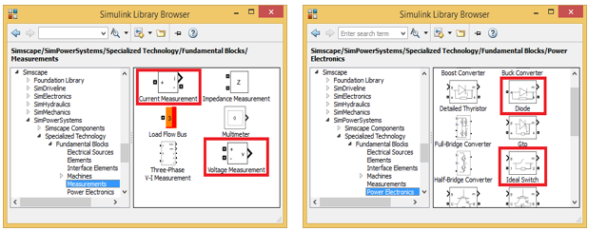
Рис. 16. Расположение Current Measurement, Voltage Measurement, Ideal Switch и Diode
Емкость (Capacitance) и сопротивление (Resistance) заданы блоками Series RLC Branch из раздела Elements библиотеки SimPowerSystems (рис. 17). Параметры этих блоков приведены на рис. 18.

Рис. 17. Расположение блока Series RLC Branch
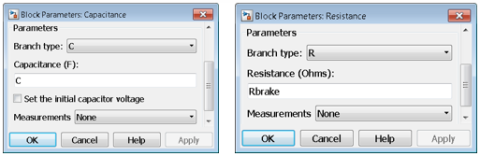
Рис. 18. Параметры блоков Capacitance и Resistance
Параметры блоков Ideal switch и Diode приведены на рис. 19.
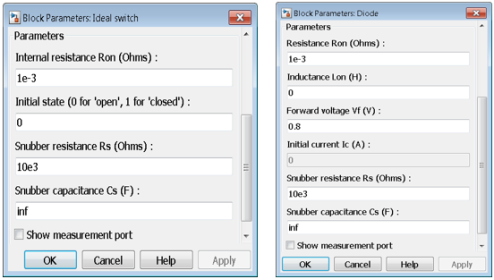
Рис. 19. Параметры блоков Ideal switch и Diode
Блоки Proportional controller и Ramp_generator показаны на рис. 20.
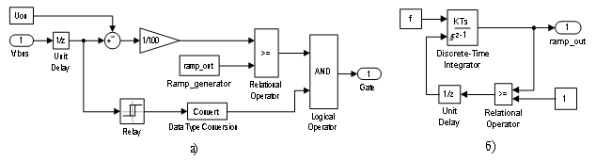
Рис. 20. Блоки Proportional controller (а) и Ramp_generator (б)
Параметры блоков Unit Delay (библиотека Simulink/Discrete) и Data Type Conversion (Simulink/Signal Attributes) даны на рис. 21.
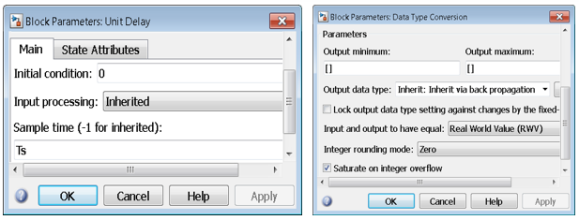
Рис. 21. Параметры блоков Unit Delay и Data Type Conversion
Параметры блоков Relational Operator и Logical Operator (Simulink/Logic and Bit Operations) приведены на рис. 22.
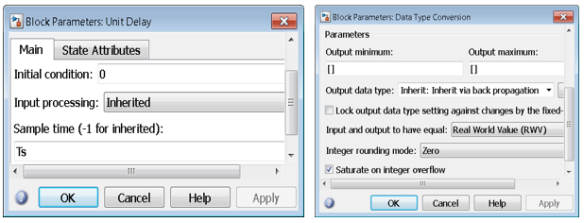
Рис. 22. Параметры блоков Relational Operator и Logical Operator
Параметры блоков Relay (Simulink/Discontinuities) и Discrete-Time Integrator (Simulink/Discrete) представлены на рис. 23.
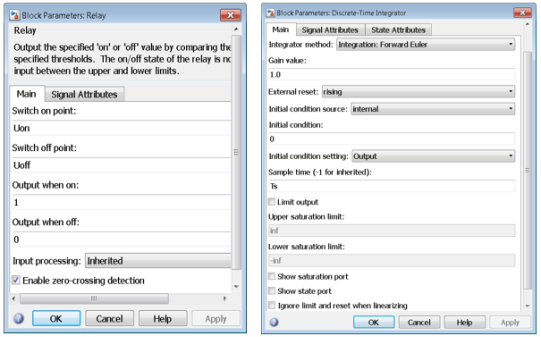
Рис. 23. Параметры блоков Relay и Discrete-Time Integrator
- Блок трехфазного инвертора напряжения (Three-phaseInverter).
Трехфазный инвертор напряжения (Three-phase Inverter) представлен блоком Universal Bridge. Его параметры даны на рис. 24.
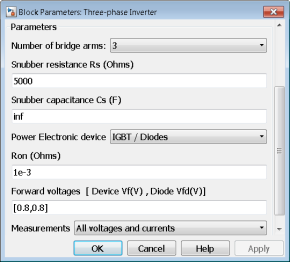
Рис. 24. Параметры трехфазного инвертора напряжения
- Блок измерения напряжения (Measures).
Схема блока Measures изображена на рис. 25.
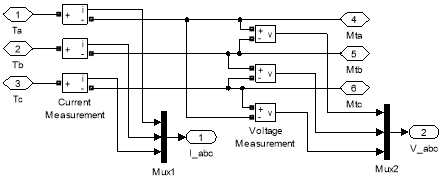
Рис. 25. Блок Measures
- Блокрегуляторатока (Current Controller).
Модель регулятора тока (Current Controller) показана на рис. 26.
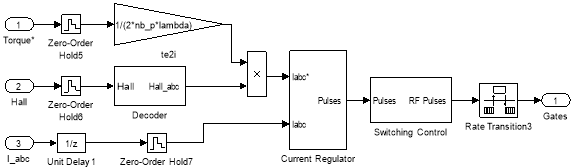
Рис. 26. Регулятор тока
В блоках Zero-Order Hold 5, 6 и 7 в строке Sample time необходимо написать параметр Ts_vect. Параметры блоков Unit Delay 1 и Rate Transition 3 задаются такими же, как на рис. 11 и 21.
Декодер (Decoder) изображен на рис. 28. В логических операторах NOT и AND следует задать Output data type: boolean. Параметры блоков Data Type Conversion представлены на рис. 27.
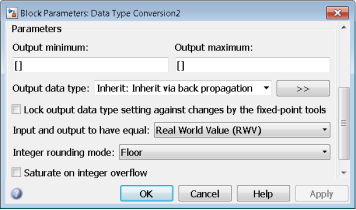
Рис. 27. Параметры блоков Data Type Conversion в схеме декодера
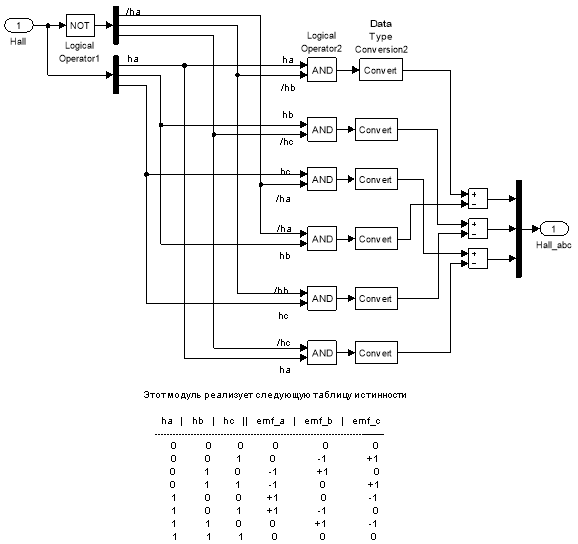
Рис. 28. Блок Decoder
Блок Current Regulator представлен на рис. 29. Параметры блоков Data Type Conversion задаются такими же, как на рис. 21. Логическим операторам NOT в строке Output data type следует установить параметр Inherit: Logical. В блоках Relay 1, 2 и 3 задаются параметры в соответствии с рис. 30.
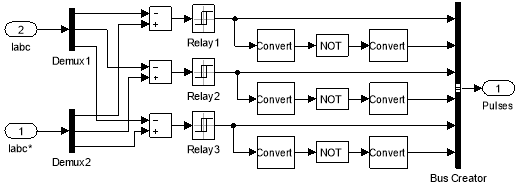
Рис. 29. Блок Current Regulator
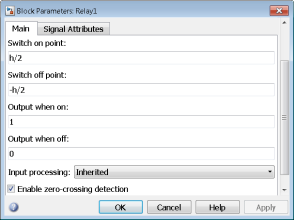
Рис. 30. Параметры блоков Relay 1, 2 и 3
Блок Switching Control представлен на рис. 31.
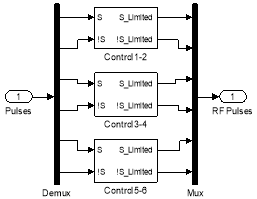
Рис. 31. Блок Switching Control
Блоки Control 1-2, 3-4 и 5-6 имеют одинаковую структуру, показанную на рис. 32,а. Структура блоков Trig 1 и 2 приведена на рис. 32,б.
В блоке S-R Flip-Flop (библиотека Simulink Extras/Flip Flops) необходимо задать параметр Initial condition: 0.
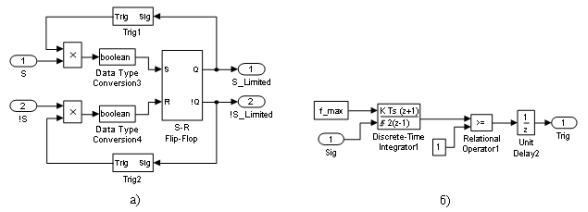
Рис. 32. Структура блоков Control (а) и Trig (б)
Параметры блоков Data Type Conversion и блока Discrete-Time Integrator 1 даны на рис. 33, блоков Relational Operator 1 и Unit Delay 2 – на рис. 34.
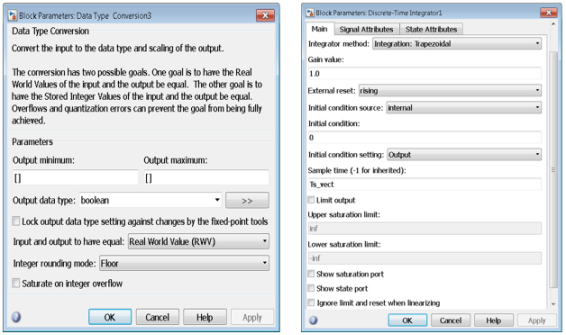
Рис. 33. Параметры блоков Data Type Conversion и блока Discrete-Time Integrator 1
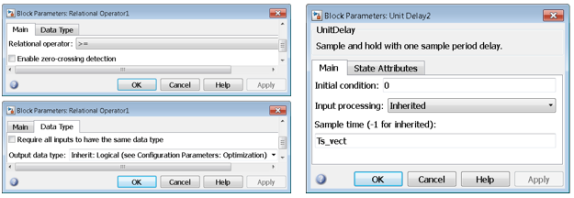
Рис. 34. Параметры блоков Relational Operator 1 и Unit Delay 2
- Блок расчета сигналов скорости и коммутации (SpeedandCommutationsignalsestimation).
Блок расчета сигналов скорости и коммутации показан на рис. 35.

Рис. 35. Блок расчета сигналов скорости и коммутации
Блок Back-EMF observer изображен на рис. 36. Элементы ic-ia, ib-ic, ia-ib представлены блоками Fcn (Simulink/User-Defined Functions), в которых требуется записать следующие выражения:
− блок ic-ia: u(3)-u(1);
− блок ib-ic: u(2)-u(3);
− блок ia-ib: u(1)-u(2).
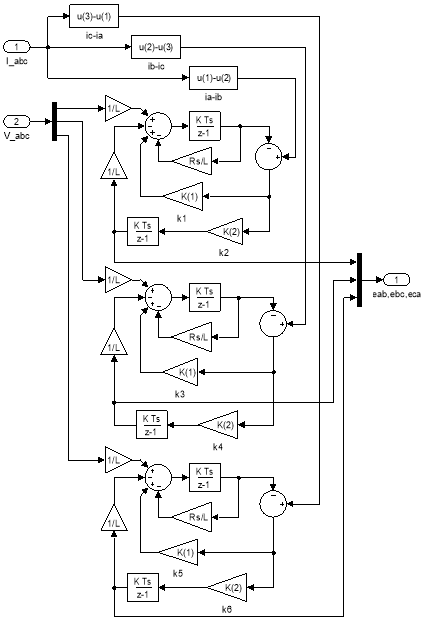
Рис. 36. Блок Back-EMF observer
Параметры блоков Abs, MinMax (библиотека Simulink/Math Operations) и Discrete-Time Integrator даны на рис. 37.
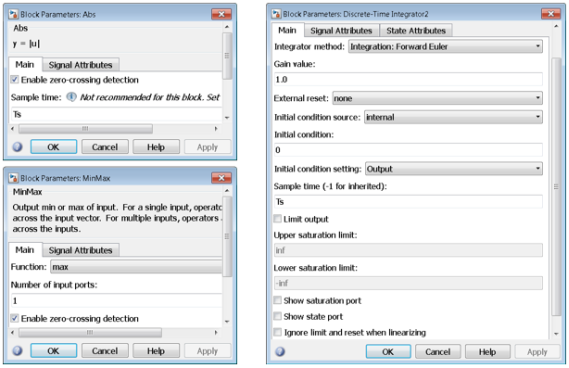
Рис. 37. Параметры блоков Abs, MinMax и Discrete-Time Integrator 2
Структура блока Speed sign indicator показана на рис. 38. Параметры блоков Zero-Order Hold 8, Detect Increase (Simulink/Logic and Bit Operations) и Data Type Conversion 5 даны на рис. 39. В блоке Fcn задать выражение: 1*(u(1)= =1)-1*(u(1)= =0).

Рис. 38. Блок Speed sign indicator
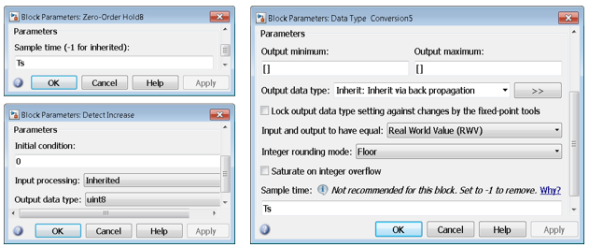
Рис. 39. Параметры блоков Zero-Order Hold 8, Detect Increase и Data Type Conversion 5
В блоке Lowpass filter (рис. 40) элементы Second-Order Filter 1, 2 и 3 имеют одинаковые параметры, приведенные на рис. 41. Расположение блока Second-Order Filter в разделе Filters библиотеки SimPowerSystems показано на рис. 42.
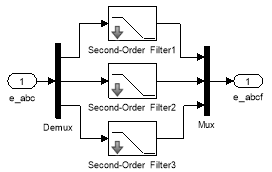
Рис. 40. Блок Lowpass filter

Рис. 41. Параметры блоков Second-Order Filter
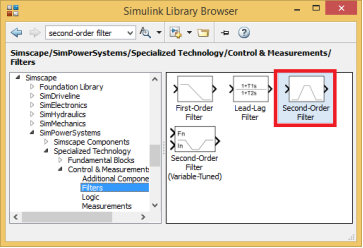
Рис. 42. Расположение блока Second-Order Filter
Блок abc→alpha-beta приведен на рис. 43,а, блок qde2sc – на рис. 43,б.
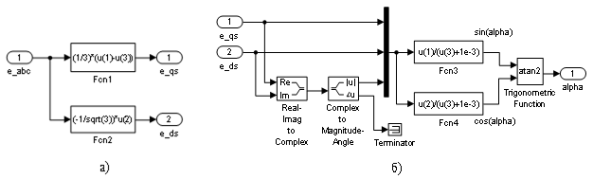
Рис. 43. Блоки abc→alpha-beta (а) и qde2sc (б)
В блоке Real-Imag to Complex (Simulink/Math Operations) выбрать параметр Input: Real and imag, в блоке Complex to Magnitude-Angle (Simulink/Math Operations) – параметр Output: Magnitude and angle.
В Trigonometric Function (Simulink/Math Operations) установить:
− Function: atan2;
− Approximation method: None;
− Output signal type: auto.
В блоках Fcn задать следующие выражения:
− блок Fcn1: (1/3)*(u(1)-u(3));
− блок Fcn2: (-1/sqrt(3))*u(2);
− блок Fcn3: u(1)/(u(3)+1e-3);
− блок Fcn4: u(2)/(u(3)+1e-3).
Блок Terminator находится в библиотеке Simulink/Sinks.
Блок Commutation signals представлен на рис. 44. Параметры блоков Relational Operator, Logical Operator и Data Type Conversion даны на рис. 45 и 46.
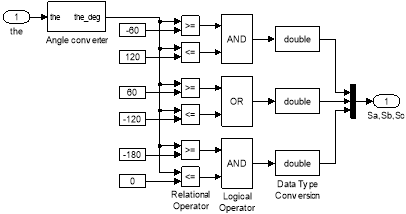
Рис. 44. Блок Commutation signals
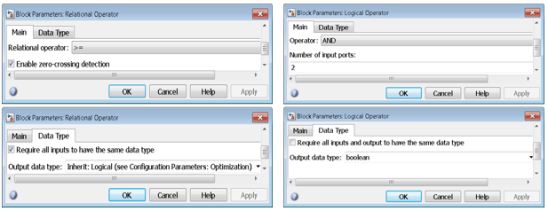
Рис. 45. Параметры блоков Relational Operator и Logical Operator в схеме Commutation signals
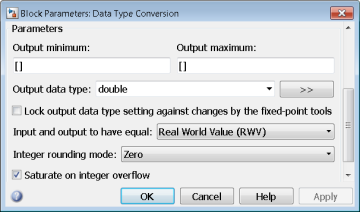
Рис. 46. Параметры блоков Data Type Conversion в схеме Commutation signals
Схема блока Angle Converter приведена на рис. 47.
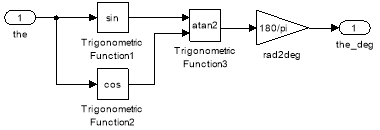
Рис. 47. Блок Angle Converter
- Блок бесконтактного двигателя постоянного тока (PermanentMagnetSynchronousMachine).
Бесконтактный двигатель постоянного тока представлен блоком Permanent Magnet Synchronous Machine из раздела Machines библиотеки SimPowerSystems (рис. 48). Параметры двигателя даны на рис. 49.
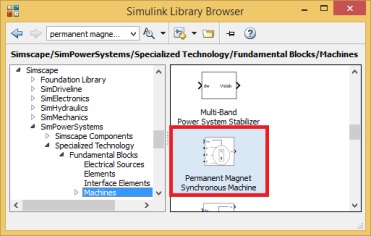
Рис. 48. Расположение блока Permanent Magnet Synchronous Machine
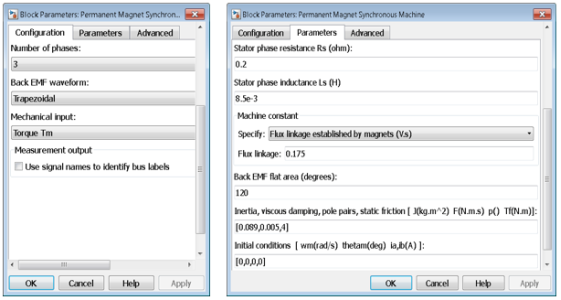
Рис. 49. Параметры бесконтактного двигателя постоянного тока
Параметры блока Rate Transition приведены на рис. 50.
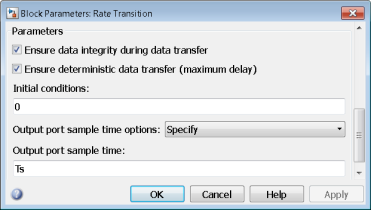
Рис. 50. Параметры блока Rate Transition
Расчет коэффициентов производим в Matlab-Script:
|
ramp=[-1000,1000]; |
Rbrake=8; |
f_max=20e3; |
|
Tsc=140e-6; |
C=2000e-6; |
Ts_vect=20e-6; |
|
fc=112.23; |
Uon=320; |
h=0.01; |
|
ki=46.35; |
Uoff=310; |
Zp=4; |
|
kp=1.22; |
f=4000; |
K=[3000,-49500]; |
|
sat=[-17.8,17.8]; |
nb_p=4; |
L=8.5e-3; |
|
Ts=2e-6; |
lambda=0.175; |
Rs=0.2; |
Результаты моделирования электропривода на базе бесконтактного двигателя постоянного тока даны на рис. 51 и 52.
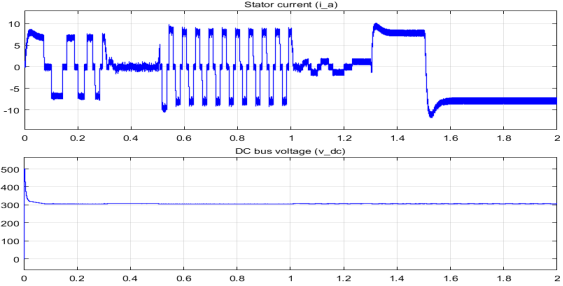
Рис. 51. Графики статорного тока ia и напряжения vdc
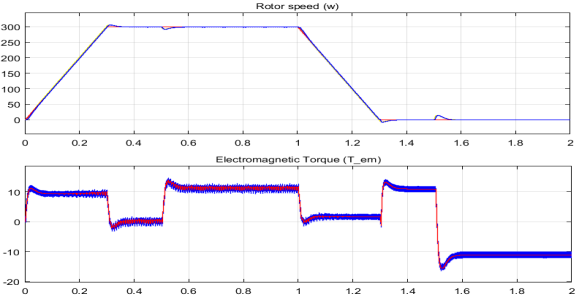
Рис. 52. Графики скорости и электромагнитного момента
Примечание: во избежание ошибок при запуске расчета модели необходимо открыть меню Simulation, выбрать Model Configuration Parameters. В открывшемся окне в меню Diagnostics перейти к пункту Connectivity и установить значение Mux blocks used to create bus signals: error, как показано на рис. 53.
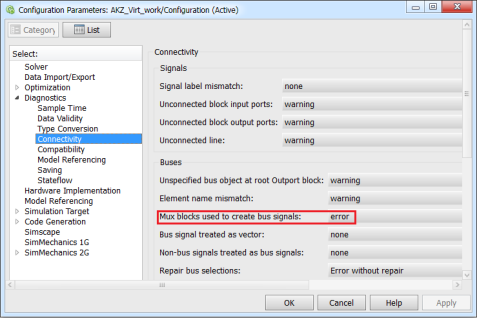
Рис. 53. Окно параметров модели
Литература:
- SimscapePowerSystemsExamples [Электронный ресурс] // MathWorks. – Режим доступа: www.mathworks.com/help/physmod/sps/examples.html.
- Герман-Галкин С. Г. Matlab & Simulink. Проектирование мехатронных систем на ПК. – СПб.: КОРОНА-Век, 2008. – 368 с.
- Герман-Галкин С.Г. Компьютерное моделирование полупроводниковых систем в MATLAB 6.0: Учебное пособие. – СПб.: КОРОНА принт, 2007. – 320 с.
- Черных И. В. Моделирование электротехнических устройств в MATLAB, SimPowerSystems и Simulink. – М.: ДМК Пресс; СПб.: Питер, 2008. – 288 с.
- Терёхин В. Б. Моделирование систем электропривода в Simulink (Matlab 7.0.1): учебное пособие / В. Б. Терёхин; Национальный исследовательский Томский политехнический университет. – Томск: Изд-во Томского политехнического университета, 2010. – 292 с.
