





В настоящее время асинхронный привод применяется в разных отраслях промышленности и является наиболее используемым электротехническим устройством.
Для наиболее эффективного управления асинхронным электроприводом, возникла необходимость в определении и контроле параметров движения рабочих органов. В современных асинхронных электроприводах, применяемых в промышленности, часто таким параметром выступает угловая скорость, необходимость определения которой связана с разными режимами работы электропривода.
Контроль координат асинхронных электроприводов может осуществляется как устройствами с датчиками, так и устройствами без датчиков скорости. Способы определения угловой скорости АД с применением датчиков: инкрементальные и абсолютные энкодеры, стробоскопические, гидравлические, пневматический и фрикционные тахометры, индукционные и емкостные таходатчики.
Недостатки применения датчиков связаны с ухудшением эксплуатационных характеристик электропривода и необходимостью совмещения датчиков с механической частью электродвигателя, что усложняет ремонт и ревизию, усложняет конструкцию электропривода. Так же при считывании сигналов с датчиков угловых перемещений, возникает необходимость их фильтрации из-за неравномерности частоты вращения вала двигателя, различных помех, шумов, возникающих при прохождении через АЦП, ЦАП преобразователи на частотомеры. Косвенный метод определения угловой скорости АД с КЗ ротором без использования датчиков угловых перемещений исключает недостатки, возникающие при использовании датчиков скорости.
Предложен косвенный метод определения угловой скорости по паспортным данным двигателя и измеряемым величинам — фазные токи и напряжения [1, 2].
На рисунке 1 представлен алгоритм для определения угловой скорости асинхронного электропривода. В соответствии с рассматриваемым алгоритмом, с учетом ввода известных значений сопротивлений обмоток статора и ротора, для определения угловой скорости асинхронного электропривода необходимо измерить мгновенные значения фазных напряжений и токов и провести вычисление в блоке вычисления угловой скорости вращения.

Рис. 1. Алгоритм изменения угловой скорости двигателя в асинхронном приводе
С учетом измеренных фазных токов iа, ib и напряжений uа, ub фаз А и В, известных значений параметров АДКР, в результате вычисления, получаем значение угловой скорости АДКР.
Таким образом, применение предлагаемого алгоритма косвенного измерения угловой скорости двигателя в асинхронном электроприводе и определение значения угловой скорости с помощью блока вычисления являются простыми по реализации, имеют повышенную точность измерений и обладают простой реализацией. Однако применяя косвенный метод определения угловой скорости возникают проблемы, связанные с изменением параметров электродвигателя при его нагреве, а также необходимостью получения точных значений токов и напряжений статора.
Вариант, предложенный на рисунке 2, основан на использовании бесконтактного оптического датчика, позволяет определить частоту вращения без установки датчика на валу двигателя [3]. Отличительная особенность предлагаемого варианта аппаратно- программного комплекса заключается в том, что силовой модуль включается в разрыв силовой части электропривода между источником питания и асинхронным двигателем путем несложных переключений.
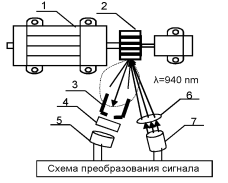
Рис. 2. Вариант аппаратно- программного комплекса: 1 — асинхронный двигатель; 2 — муфта с нанесенными рисками; 3 — бленда; 4 — светофильтр; 5-фотоприемник; 6 — формирующая линза;7 — источник излучения
Измерение скорости основано на счете импульсов, воспринимаемых фотоприемником, от меток, нанесенных на вал двигателя или муфту. В зависимости от диаметра вала, соединительной муфты, номинальной скорости вращения двигателя число меток на маске может меняться. Маски с различным числом меток изготавливаются на лазерном принтере по шаблонам.
На основе полученных оцифрованных осциллограмм токов, напряжений, скорости вращения вала двигателя по методикам и алгоритмам, осуществляется экспресс-расчет параметров электрической схемы замещения асинхронного двигателя и расчет естественных и искусственных механических, рабочих характеристик и энергетических показателей электропривода.
Предложен метод контроля вектора скорости асинхронных электродвигателей, основанный на линейном законе управления с упреждением(GPC) [4]. Представленный каскад конфигурации GPC-PI (Рисунок 3) упрощает конструкцию в отношении каскадной конфигурации GPC-GPC, сохраняя преимущества алгоритма прогнозирующего управления.
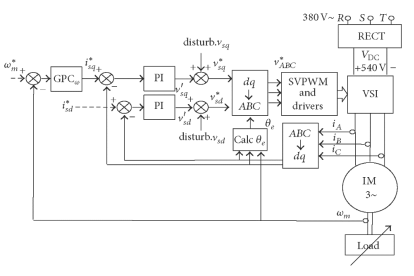
Рис. 3. Схема GPC управления скоростью асинхронного двигателя с контролем тока PI и SVPWM
Ошибка, возникшая при моделировании и реальных тестах, составляет 0,138 %, чем способствует применением данного метода в промышленности. Вклад этой работы состоит из комбинации алгоритма GPC в цикл скорости с управлением на основе PI в токовых контурах, используя простую и эффективную конструкцию, где грубая устойчивость демонстрируется для типичных асинхронных двигателей. Конструкция GPC контроллера скорости основана на первом порядке модели асинхронного двигателя с компенсированием времени задержки. Кроме того, скорость вычислений у регулятора скорости GPC значительно быстрее, чем у классических PID и немного быстрее, чем у расширенных SM контроллеров скорости при тех же вычислительных мощностях. Эта работа показывает, что GPC-PI контроллер представляет собой эффективный алгоритм вычисления скорости при различных условиях, что свидетельствует о его надежности.
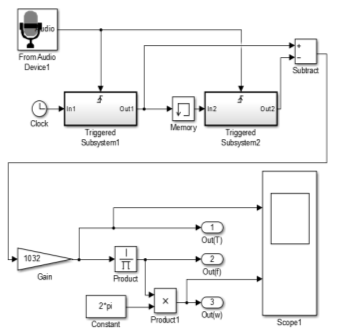
Рис. 4. Модель обработки сигнала
Рассмотрен метод определения частоты вращения используя инкрементальный энкодер серии E40H10–1000–6-L-5. Предложенная модель обработки сигнала представлена на рисунке 4. Недостатки данного метода заключаются в необходимости крепления датчика угловой скорости на валу двигателя, наличие схемы с делителем частоты. Так же возникает необходимость в применение методов по фильтрованию шумов. Достоинства данного метода заключается в его простоте и возможности измерения скорости с нескольких двигателей, используя звуковой разветвитель.
Вывод. В связи с развитием использования асинхронного электропривода в различных сферах производства, является актуальной проблема разработки методов контроля характеристик электродвигателя.
Проведенный анализ методов по определению угловой скорости асинхронного электропривода показал, что использование прямых методов измерения угловой скорости является менее эффективным и более затратным, чем используя алгоритмы для косвенных методов.
Литература:
- Хацевский К. В. Алгоритм и способ измерения угловой скорости вращения двигателя в асинхронном электроприводе [Текст] / К. В. Хацевский, Ю. Н. Дементьев, А. Д. Умурзакова // Динамика систем, механизмов и машин. — 2014. — № 1. — С. 393–396.
- Дементьев Ю. Н. Косвенный контроль выходных механических переменных асинхронного электродвигателя [Текст] / Ю. Н Дементьев, А. Д. Умурзакова // Электротехника: сетевой электронный научный журнал. — 2015. — № 3. — С. 67–69.
- Мугалимов Р. Г. Аппаратная реализация комплекса для экспресс-оценки энергоэффективности асинхронных электроприводов [Текст] / Р. Г. Мугалимов, А. И. Боков, А. Р. Мугалимова // Актуальные проблемы современной науки, техники и образования. — 2015. — № 1. — С. 166–169.
