





Ключевые слова: буровая установка, частотно-регулируемый асинхронный двигатель, диапазон регулирования скорости, высоковольтный преобразователь частоты, широтно-импульсный преобразователь, закон регулирования частоты
В действующей буровой установки в приводе лебедки используется асинхронный двигатель с фазным ротором и электропривод неуправляемый. Для регулирования скорости вращения привода лебедки установлена коробка передач позволяющий регулировать скорость его в диапазоне 10: 1. Поэтому для повышения надежности, производительности работы лебедки, а также с точки зрении экономичности работы лебедки заменяем асинхронный двигатель с фазным ротором на аналогичный асинхронный двигатель с к. з. ротором. Для управления двигателем выбираем частотный способ регулирования скорости его.
Номинальные технические параметры выбираемого асинхронного двигателя с к. з. ротором типа АЗ-12–39–6 привода лебедки: номинальная мощность — 320 кВт, номинальное напряжение — 6000 В, номинальная частота вращения — 985 об/мин, КПД — 92,0 %, ![]() , кратность максимального момента — 2,2, кратность пускового момента — 1,2, кратность пускового тока — 6,0, момент инерции ротора — 37,5 кг.м2.
, кратность максимального момента — 2,2, кратность пускового момента — 1,2, кратность пускового тока — 6,0, момент инерции ротора — 37,5 кг.м2.
Наиболее сложным элементом ПЧВМ является входной трансформатор, вторичные обмотки которого разделены на три группы — по пять обмоток в группе, имеющих фазовый сдвиг между напряжениями соседних обмоток. Каждая обмотка трансформатора подключена к силовому модулю — ячейке, состоящей диодного выпрямителя и однофазного IGBT — AИН с ШИМ. Система управления предполагает комбинированное управление мостовыми инверторами, т. е. часть звеньев работает в режиме ШИМ, часть звеньев управляется с выходной частотой преобразователя. Применение многоуровневого звена постоянного тока с комбинированной системой управления позволяет изготовить трехфазный высоковольтный инвертор с использованием приборов 17 класса.
Применение IGBT модулей значительно увеличивает надежность преобразователя, снижает массогабаритные показатели, уменьшает стоимость высоковольтной преобразователей техники для синхронного и асинхронного электропривода.
На рис. 1 начерчена разработанная функциональная схема частотно-регулируемого асинхронного электропривода буровой лебедки. Частотно-регулируемый асинхронный электропривод состоит из следующих устройств: ПЧВМ — высоковольтный преобразователь частоты, ТС — силовой трансформатор питающий его, ДТ — датчик тока, ДН — датчика напряжения, ДМ — датчик момента, ДС — датчик скорости.
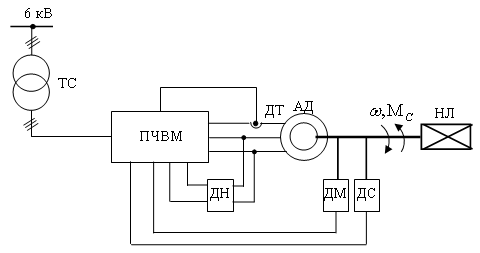
Рис. 1. Функциональная схема частотно-регулируемого асинхронного электропривода буровой лебедки
Частотно-регулируемый асинхронный электропривод буровой лебедки работает следующим образом. Регулируемая частота питающего тока статора АД задается, и напряжения статора будет устанавливаться по экономичному закону регулирования напряжения в зависимости от значения действующего значения момента сопротивления буровой лебедки.
Для управления скоростью частотно-регулируемого асинхронного двигателя буровой лебедки используем экономичный закон управления частотой.
Общие потери асинхронного двигателя типа АЗ-12–39–6 определим с помощью выражения КПД:

Активная мощность, потребляемая из сети асинхронного двигателя:

Реактивная мощность асинхронного двигателя, потребляемая из сети
![]()
Полная мощность, потребляемая из сети асинхронного двигателя:
![]()
Для практических расчетов удобно выразить основных параметров асинхронного двигателя через момент сопротивления на валу, кратность максимального момента и соответствующие значения параметров при номинальном режиме.
Вращающий момент. Кратность максимального момента bном изменяется пропорционально квадрату напряжения и обратно пропорционально квадрату частоты.
Отношение максимального момента к моменту сопротивления на валу
 (1)
(1)
где ![]() относительное значение момента сопротивления на валу двигателя;
относительное значение момента сопротивления на валу двигателя;  относительное изменение напряжения двигателя;
относительное изменение напряжения двигателя;  относительное изменение частоты напряжения двигателя.
относительное изменение частоты напряжения двигателя.
Если асинхронный двигатель работает с нагрузкой, отличной номинальной, т. е. при моменте  (МС — момент сопротивления на валу двигателя), то кратность максимального момента по отношению к этому значению момента сопротивления будет равна:
(МС — момент сопротивления на валу двигателя), то кратность максимального момента по отношению к этому значению момента сопротивления будет равна:
 (2)
(2)
Если пренебречь активным сопротивлением обмотки статора, то критическое скольжение будет изменяться обратно пропорционально частоте,
 (3)
(3)
Формулу Клосса для частотно-регулируемого асинхронного двигателя запишем в упрощенном виде:
 (4)
(4)
где sкр определено при номинальной частоте.
Для значений частоты ![]() рассчитываем механические характеристики асинхронного двигателя по (4) и построим механические характеристики асинхронного двигателя (см. рис.2).
рассчитываем механические характеристики асинхронного двигателя по (4) и построим механические характеристики асинхронного двигателя (см. рис.2).
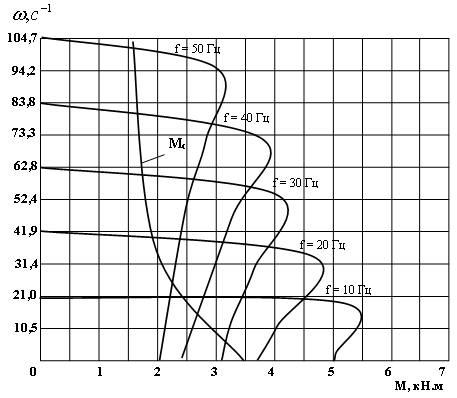
Рис. 2. Механические характеристики частотно-регулируемого асинхронного двигателя АЗ-12–39–6 буровой лебедки для экономичного закона частотного управления
Таким образом, использованияэкономичного закона частотного управления асинхронным электроприводом буровой лебедки позволяет значительно экономить электроэнергии буровой установки.
Литература:
- Imomnazarov A. T. Neft va gaz konlarining elektr jihozlari. O1quv qo1llanma. — Toshkent: «CHO`LPON», 2007. — 145 b.
- Imomnazarov A. T. Ekektromexanik tizimlarning elementlari. Darslik. Toshkent: «Ta’lim», 2009. — 155 b.
- Hoshimov O. O., Imomnazarov A. T. Ekektromexanik tizimlarda energiya tejamkorlik. 2- nashr. Darslik. — Тoshkent: Fan va texnologiya, 2015. — 155 b.
- Имомназаров А. Т., Аъзамова Г. А. Асинхрон моторларнинг энергия тежамкор иш режимлари. Монография. — Тошкент: ТошДТУ, 2014. — 140 б.
