




Статья посвящена анализу проектирования транспортеров манипуляторов с конструкцией рамы в виде пространственной фермы, основным этапам проектирования, наиболее часто встречающимся приёмам при проектировании арочных рам. Характеру и видам нагружения. Расположению конструктивных элементов в фермных рамах в зависимости от нагрузок, технологического оснащения производства.
Ключевые слова: фермные рамы, продольные и поперечные профильные схемы рам, асимметричная и симметричные схемы рам, виды нагружения арочных рам — изгиб и кручение.
В конце XX столетия в ремонтном машиностроении при создании транспортёров-манипуляторов наиболее востребованными были машины, имеющие рамы типа ферм. Их основным достоинством было высокая прочность при малых габаритах. Благодаря этому машины получались легкими и компактными.
Наивысшего расцвета конструкции рам с пространственной фермой достигли в картофелеуборочных комбайнах ККУ-2А (комбайн картофелеуборочный двухрядный). Он явился эталонным представителем машин с конструкцией рамы в виде фермы при максимальном весе 4,5 т, он принимал нагрузку от почвы на 1 га до 1 000 т, работая с тракторами класса 1,4 ÷ 3,0 тс.
Примерно в это же время транспортёры-манипуляторы, которые в базовой точке (склад) производили загрузку комплектующих деталей и узлов, производили их доставку к рабочим местам. Причём, загрузка могла производиться в любой последовательности, т. к. транспортёр-манипулятор мог в зависимости от программы раздачи комплектующих по рабочим местам перемещать их внутри себя по продольным транспортёрам и транспортёрам-накопителям. Общая технологическая схема транспортёра-манипулятора приведена на рис. 1, а схема его рамы в виде пространственной фермы на рис. 2 [1].
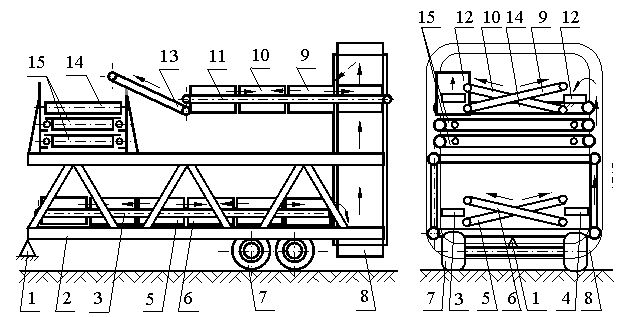
1 — передняя опора; 2 — боковина рамной фермы; 3 — продольный транспортёр заднего направления в 1-м ярусе; 4 — продольный транспортёр переднего направления в 1-м ярусе; 5 — поперечный транспортёр-накопитель левого направления в 1-м ярусе; 6 — поперечный транспортёр-накопитель правого направления в 1-м ярусе; 7 — опорные колёса; 8 — элеватор; 9 — поперечный транспортёр-накопитель левого направления во 2-м ярусе; 10 — поперечный транспортёр-накопитель правого направления во 2-м ярусе; 11 — продольный транспортёр переднего направления во 2-м ярусе; 12 — продольный транспортёр заднего направления во 2-м ярусе; 13 — транспортёр подачи блоков на неподвижную часть; 14 — неподвижная часть телескопического транспортёра; 15 — подвижные части телескопического транспортёра.
Рис. 1 — Общая схема подвижного транспортёра манипулятора
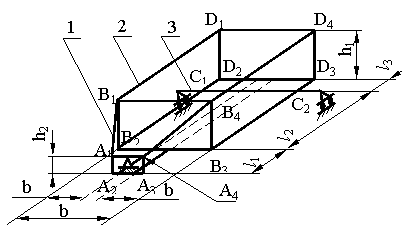
1 — передняя часть (прицеп); 2 — средняя часть; 3 — мост опорных колёс
Рис. 2 — Симметричная схема рамы подвижного транспортёра манипулятора (b2 = b3)
При проектировочных расчетах были использованы расчётные схемы для ферм, приведённые на рис. 3.
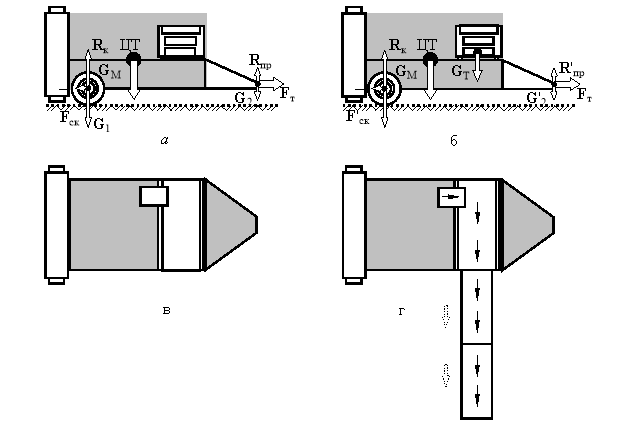
а — вариант рамы подвижного транспортёра манипулятора в транспортном положении (вид сбоку);
б — вариант рамы подвижного транспортёра манипулятора в транспортном положении (вид сверху);
в — вариант рамы подвижного транспортёра манипулятора в рабочем положении с полным выдвижением манипулятора (вид сбоку);
г — вариант рамы подвижного транспортёра манипулятора в рабочем положении с полным выдвижением манипулятора (вид сверху);
GМ — вес машины; GТ — максимальный вес блоков на манипуляторе;
G1 — вес машины приходящийся на опорные колеса в транспортном режиме; G'1 — вес машины приходящийся на опорные колеса с полным выдвижением манипулятора; G2 — вес машины приходящийся на прицеп трактора транспортном режиме; G'2 — вес машины приходящийся на прицеп трактора рабочем режиме с полным выдвижением манипулятора; Fт — сила тяги трактора; Rк, R'к, Rпр, R'пр — соответственно опорные реакции колёс и прицепа в транспортном и рабочем положении;
Fск, F'ск — силы сопротивления качению колес транспортёра манипулятора в транспортном положении и соответственно в транспортном и в рабочем положении с полным выдвижением манипулятора; ЦТ — центр тяжести транспортёра манипулятора.
Рис. 3 — Продольные схемы рам транспортёра манипулятора и их нагружение
Из приведённых схем видно, что самым опасным является рабочее положение с полным выдвижением манипулятора, т. к. масса манипулятора возрастает на 900 кг. Поэтому необходима проверка рамы транспортёра-манипулятора, состоящей из двух боковых ферм, основными элементами которых являются верхняя и нижняя обыкновенные трубы Ø 80 ГОСТ 3262–72, на прочность. Расчётная схема приведена на рис. 4.
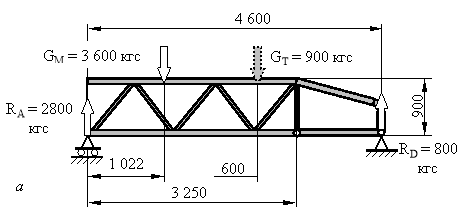
а — результаты экспериментальных исследований;
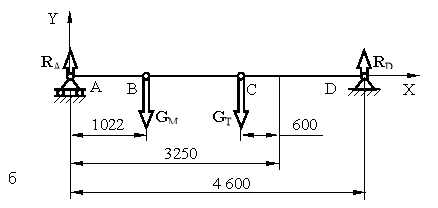
б — расчётная схема вертикальных нагрузок рамы.
Рис. 4 — Исходные данные и расчётная схема вертикальных нагрузок рамы транспортёра-манипулятора с max нагрузкой
Составим уравнения равновесия
ΣFY = RA — GМ — GК + RC = 0 (1)
ΣMA = — GМ·1,022 — GК 2,650 + RС·4,600 = 0. (2)
GМ = 3 600·9,81 = 35 316 Н, GК = 900·9,81 = 8 829 Н
Из 2-го уравнения
RC = (GМ·1,022 + GК 2,650)/6,4 = 12 932 Н
Из 1-го уравнения
RA = GМ + GМ — RC = 35 316 + 8 829–12 932 = 31 213 Н
На основании расчётов построим эпюры сил (рис. 5а) и моментов (рис. 5б)
Учитывая то, что рама транспортёра-манипулятора выполнена не на цилиндрических шарнирах, а с жесткой заделкой в т. А и D рис. 4 при малых поперечных углах наклона сохраняет равномерность распределения нагрузки между правой и левой полурамами, примем расчетный статический момент
М расч. стат. = ½ ΣМIImin = ½ · 31 900 = 15 950 Н·м.
Подберём момент сопротивления поперечного сечения исходя из допустимых напряжений изгиба при знакопеременных нагрузках [σиз]III = 1 200 кгс/см2 (120 МПа) для стали 09Г2С [1]
WX = М расч. стат. / 1 200 = 132,5 см3 = 0,000132 м3.
Таким моментом сопротивления обладают швеллеры № 18а ГОСТ 8240–72 (WX = 132 см3, табл. 42 с. 146[2]).
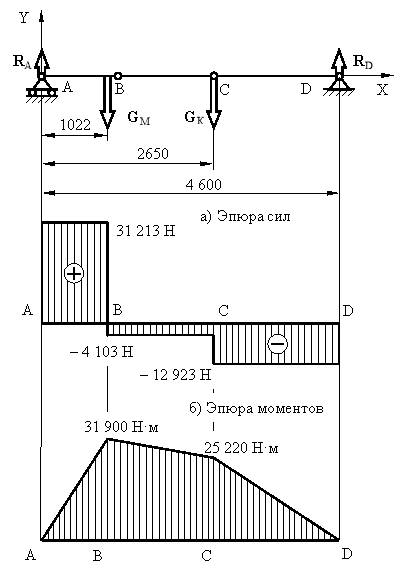
Рис. 5 — Аналитическая расчётная схема арочного транспортёра-манипулятора и эпюры сил и моментов
По крутящим напряжениям, которые возникают в раме, можно воспользоваться допущением того, что крутящий момент в сечении равен половине веса транспортёра-манипулятора с полным выдвижением манипулятора (P ТМ = 4 500 кгс) на половину ширины рамы транспортёра-манипулятора (B = 1 600 мм)
MKP = P ТМ · B = ½ 4 500 · ½ 160 = 180 000 кгс см = 18 000 Н м
Суммарный момент сопротивления кручения профилей рамы из профилей в виде швеллеров составит:
ΣWК = 2 JК/ B'= 140 905 / 85 = 1 657 см3 = 0,0165 м3
Определим напряжения кручения, возникающие в профилях:
τ = M KP / ΣWК = 180 000 / 1 657 = 108,63 кгс/см2 =
= 10 863 000 Па = 10,86 МПа << [τ] = 60 МПа
Однако данные профили сводят пространственную конструкцию к плоской, поэтому воспользуемся теоремой Штейнера, разнеся стандартные круглые трубы на 800 мм (рис. 4а).
Рама собирается из стальных водогазопроводных труб (ГОСТ 3262–75)[3]: наружный диаметр DH = 101,3 мм; толщина стенки s = 4,0 мм; площадь поперечного сечения S = 12,22 см2; масса 1 м — 10,85 кг.
JX = π RH3s = 1,62 10 -7 м4
WX = π RH2s = 3,2 10 -5 м4
При разнесении на 800 мм они соответственно составят:
JX = π RH3s + S ½ HP = 1,97 10 -5 м4
WX = JX / yА = 4,39 10 -4 м4
Из принятого условия нейтральная ось в сечении BB' пройдет на расстоянии yА = 45 см от нейтральных осей труб.
Наибольший изгибающий момент в сечении рамы равен 31 900 Н·м, учитывая то, что рама транспортёра-манипулятора установлена в расчётной схеме на шарнирах в т. А и D рис. 5, и при малых поперечных углах наклона сохраняет равномерность распределения нагрузки между правой и левой полурамами, примем расчетный статический момент
М расч. стат. = ½ ΣМIImin = ½ · 31 900 = 15 950 Н·м.
таким образом для водогазопроводных труб (ГОСТ 3262–75), изготовленных из стали 08 (ГОСТ 1050–74) [4] при допустимых напряжениях изгиба [σИЗ]II[5] = = 850 кгс/см2 (допустимые напряжения), момент сопротивлению изгибу в вертикальной плоскости относительно оси 0X составит:
MX ИЗ max
WX РАСЧ = ———— = 1, 87 10–4 м3
[σИЗ]II
Учитывая, что WX >WX РАСЧ, то данная ферма имеет запас прочности 2,3, что позволяет использовать все толщины труб условным проходом 90 мм. Из принятого условия, нейтральная ось в сечении BB' пройдет на расстоянии 45,51 см от нейтральных осей труб (рис. 6).
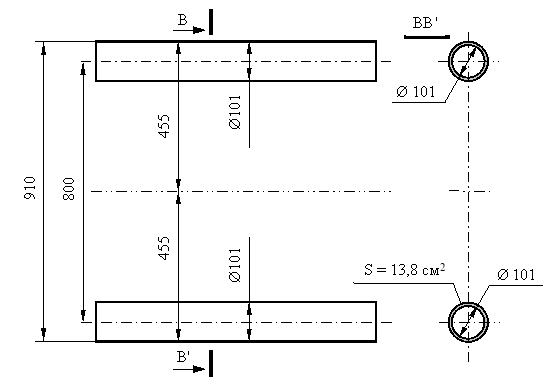
Рис. 6 — Расположение несущих труб в арке фермной рамы.
Реальные напряжения изгибу составят
MX ИЗ max
σИЗ = ———— = 36,33 · 106 МПа
WX
Расчетный момент сопротивления составит
WК расч = 2JК / r BB' = 11,2 10–4 м4,
и напряжения от кручения составят
τ = M KP / ΣWК = 16,07 МПа << [τ] = 90 МПа
что значительно меньше требуемого по прочностным расчетам.
Проведем проверку прочности по теориям прочности:
— по теории наибольших нормальных напряжений
σ ЭКВ = 42,4 МПа < [σ] = 85 МПа
— по теории наибольших удлинений
σ ЭКВ = 44,2 МПа < [σ] = 85 МПа
— по теории наибольших касательных напряжений
σ ЭКВ == 48,5 МПа < [σ] = 85 МПа
— по энергетической теории
σ ЭКВ == 45,7 МПа < [σ] = 85 МПа
Таким образом, основными особенностями проектирования фермных рам для транспортно-складского комплекса ремонтной базы РЖД являются:
1) выбор основного конструктивного элемента для формирования боковых ферм рамы;
2) определение величины разноса верхнего и нижнего элемента ферм;
3) проверка по теориям прочности с учётом нормальных и касательных напряжений.
Литература:
- Кущев И. Е. Разработка разветвляющейся технологии уборки картофеля с обоснованием параметров и режимов работы сепарирующих устройств Дисс. на соиск. учён. степ. д.т.н. по спец. 05.20.01 — Рязань: Отделение полиграфии ИТО РИПЭ Минюста России 1999. — 467 с.
- Анурьев В. И. Справочник конструктора-машиностроителя: В 3-х т. Т.1. — 5-е изд., перераб. и доп., — М.: Машиностроение, 1979. — 728 с., ил.
- Анурьев В. И. Справочник конструктора-машиностроителя: В 3-х т. Т.3. — 5-е изд., перераб. и доп., — М.: Машиностроение, 1979. — 557 с., ил.
- Филатова С. А., Сороковых Н. В. Техническая механика. Сопротивление материалов. Расчёты элементов конструкций ВВТ при различных видах деформаций. — Рязань: РВВДКУ, 2012. — 90с.
[1] Анурьев В.И. Справочник конструктора-машиностроителя: В 3-х т. Т. 1. – 5-е изд., перераб. и доп. – М.: Машиностроение, 1979. – 728 с. (табл. 20 механические свойства и допускаемые напряжения легированных конструкционных сталей, с. 88)
[2] Анурьев В.И. Справочник конструктора-машиностроителя: В 3-х т. Т. 1. – 5-е изд., перераб. и доп. – М.: Машиностроение, 1979. – 728 с. (табл. 41 Балки двутавровые, с. 144)
[3] Анурьев В.И. Справочник конструктора-машиностроителя: В 3-х т. Т. 3. – 5-е изд. перераб. и доп. – М.: Машиностроение, 1979. – 557 с. (229 с.)
[4] Анурьев В.И. Справочник конструктора-машиностроителя: В 3-х т. Т. 1. – 5-е изд. перераб. и доп. – М.: Машиностроение, 1979. – 728 с. (86 с.)
[5] Анурьев В.И. Справочник конструктора-машиностроителя: В 3-х т. Т. 1. – 5-е изд. перераб. и доп. – М.: Машиностроение, 1979. – 728 с. (84 с. табл. 14 – II – переменная)
