





Математическая модель асинхронного двигателя с переменными ψm – is на выходе апериодических звеньев в Simulink-Script
Емельянов Александр Александрович, доцент;
Бесклеткин Виктор Викторович, ассистент;
Антоненко Илья Александрович, студент;
Коновалов Илья Дмитриевич, студент;
Харин Вадим Сергеевич, студент;
Ченцова Екатерина Вячеславовна, студент;
Федосеев Павел Витальевич, студент;
Дугин Павел Игоревич, студент;
Некрасова Вероника Николаевна, студент;
Глух Константин Юрьевич, студент;
Солодова Александра Сергеевна, студент
Российский государственный профессионально-педагогический университет (г. Екатеринбург)
Данная работа является продолжением статьи [1], в которой были подробно даны способы и технологии получения пространственных векторов. В работах [2] и [3] приведено множество вариантов определения электромагнитных моментов комбинацией двух переменных (ψr – is, ψs – is, ψs – ψr и т. д.). В наших статьях за 2015 г. приведены математические модели с переменными ψr и is. В этой работе рассмотрим моделирование асинхронного двигателя с короткозамкнутым ротором с переменными ψm и is.
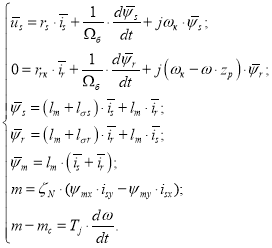
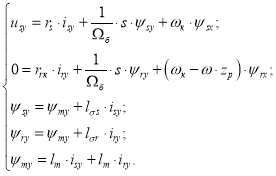
Векторные уравнения асинхронного двигателя с короткозамкнутым ротором имеют следующий вид:
Обозначим токи, потокосцепления и индуктивности:
![]()
![]()
![]()
![]()

![]()
![]()
Переводим систему уравнений к изображениям ![]() :
:
![]() (2)
(2)
![]() (3)
(3)
![]() (4)
(4)
![]() (5)
(5)
![]() (6)
(6)
![]() (7)
(7)
Схема замещения и векторная диаграмма переменных [3] приведены на рис. 1 и 2.
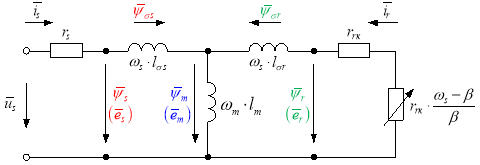
Рис. 1. Связь токов и потокосцеплений в асинхронном двигателе
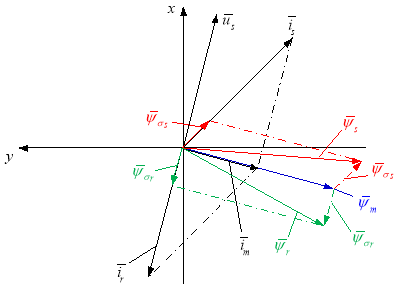
Рис. 2. Качественная картина расположения векторов в двигательном режиме асинхронного двигателя
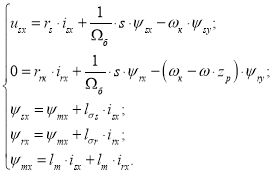
Расписываем векторы через проекции:
![]()
![]()
![]()
![]()
![]()
![]()
Записываем уравнения по проекциям.
Уравнение (1):
![]()
По оси (+1):
По оси (+j): ![]() (1”)
(1”)
Уравнение (2):
![]()
По оси (+1): ![]() (2’)
(2’)
По оси (+j): ![]() (2”)
(2”)
Уравнение (3):

По оси (+1): ![]() (3’)
(3’)
По оси (+j): ![]() (3”)
(3”)
Проекции потокосцепления ![]() и
и ![]() можно выразить и в следующей форме:
можно выразить и в следующей форме:
![]()
![]()
Уравнение (4):

По оси (+1): ![]() (4’)
(4’)
По оси (+j): ![]() (4”)
(4”)
Проекции потокосцепления ![]() и
и ![]() можно выразить и в следующей форме:
можно выразить и в следующей форме:
![]()
![]()
![]()
Уравнение (5):
![]()
По оси (+1): ![]() (5’)
(5’)
По оси (+j): ![]() (5”)
(5”)
Рассмотрим систему уравнений (1’), …, (5’) по оси (+1):
Из уравнения (5’):
![]() (6’)
(6’)
Подставим ![]() в уравнение (4’):
в уравнение (4’):
Обозначим ![]()
Рассмотрим систему уравнений (1”), …, (5”) по оси (+j):
Из уравнения (5”):
![]() (6”)
(6”)
Подставим ![]() в уравнение (4”):
в уравнение (4”):

![]() (7”)
(7”)
Для уравнений (1’) и (2’) по оси (+1):
![]()
![]()
Из уравнения (1’):

 (8)
(8)
Из уравнения (8) выделим ![]() :
:
![]() (8’)
(8’)
Подставим в уравнение (2’) выражения ![]() ,
, ![]() и
и ![]() из уравнений (6’), (7’) и (7”):
из уравнений (6’), (7’) и (7”):

Затем внесем в полученное уравнение выражение ![]() из (8’):
из (8’):


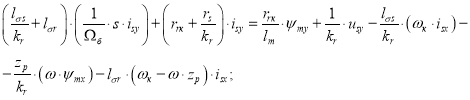
 (9)
(9)
Перенесем в левую часть слагаемые с


Обозначим:
![]()
![]()
![]()
Определим ![]() :
:

Структурная схема проекции статорного тока isx на ось +1 приведена на рис. 3.
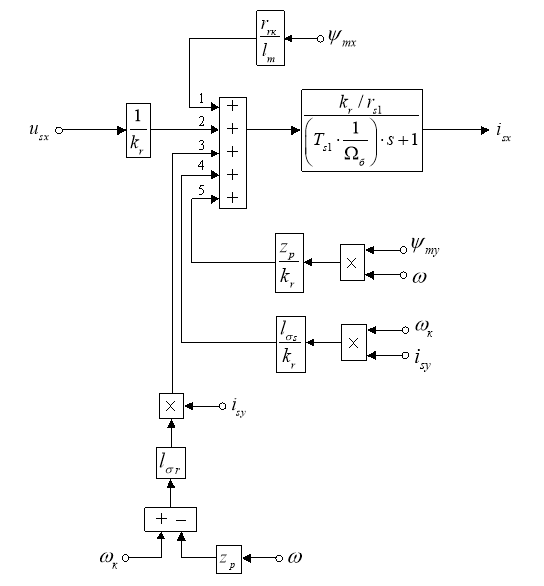
Рис. 3. Структурная схема проекции статорного тока isx на ось +1
Для уравнений (1”) и (2”) по оси (+j):
![]()
![]()
Из уравнения (1”):

 (10)
(10)
Из уравнения (10) выделим ![]() :
:
![]() (10’)
(10’)
Подставим в уравнение (2”) выражения ![]() ,
, ![]() и
и ![]() из уравнений (6”), (7”), (7’):
из уравнений (6”), (7”), (7’):

Затем внесем в полученное уравнение выражение


 (11)
(11)
Перенесем в левую часть слагаемые с ![]() :
:
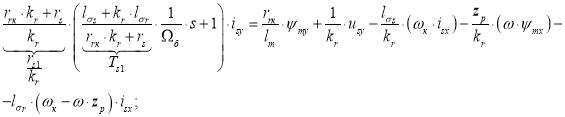

Структурная схема проекции статорного тока isy на ось +j приведена на рис. 4.
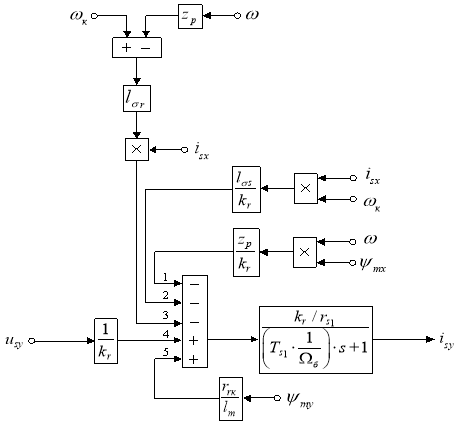
Рис. 4. Структурная схема проекции статорного тока isy на ось +j
Определение потокосцепления
Из уравнения (8) выделим ![]() :
:
![]() (12)
(12)
Подставим в уравнение (2’) выражения ![]() ,
, ![]() ,
, ![]() и
и ![]() из уравнений (6’), (7’), (7”) и (12):
из уравнений (6’), (7’), (7”) и (12):
 (13)
(13)
Перенесем в левую часть слагаемые с ![]() :
:

Обозначим ![]() .
.

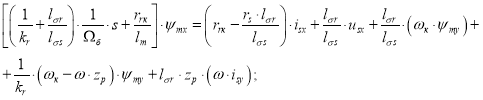
Структурная схема проекции потокосцепления ψmx на ось +1 приведена на рис. 5.
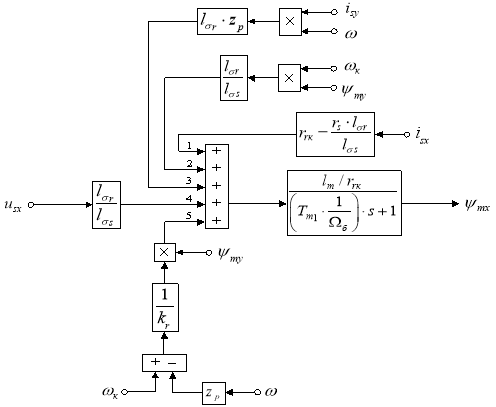
Рис. 5. Структурная схема проекции потокосцепления ψmx на ось +1
Определение потокосцепления ![]() по оси (+j).
по оси (+j).
Из уравнения (10) выделим ![]() :
:
![]() (14)
(14)
Подставим в уравнение (2”) выражения ![]() ,
, ![]() ,
, ![]() и
и ![]() из уравнений (6”), (7”), (7’) и (14):
из уравнений (6”), (7”), (7’) и (14):
 (15)
(15)
Перенесем в левую часть слагаемые с ![]() :
:

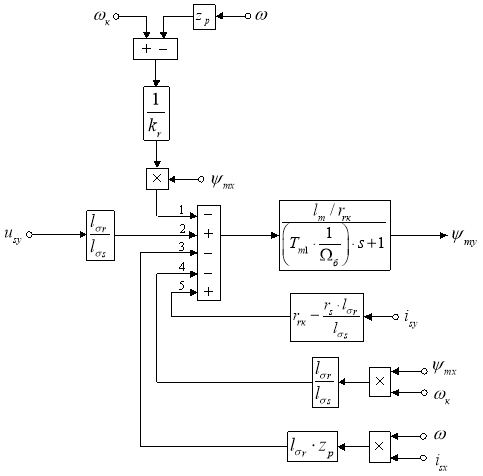
Рис. 6. Структурная схема проекции статорного тока ψmy на ось +j
На рис. 7 представлена структурная схема для реализации уравнения электромагнитного момента (6):
![]()
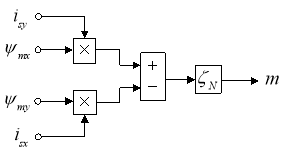
Рис. 7. Математическая модель определения электромагнитного момента m
Наконец, из уравнения движения (7) выразим механическую угловую скорость вращения вала двигателя:
![]()
![]() (16)
(16)
Структурная схема дана на рис. 8.
![]()
Рис. 8. Математическая модель уравнения движения
Математическая модель асинхронного двигателя с короткозамкнутым ротором с переменными ψm – is на выходе апериодических звеньев приведена на рис. 9. Параметры асинхронного двигателя рассмотрены в работах [2] и [3].
Расчет параметров производим в Script:
|
PN=320000; UsN=380; IsN=324; fN=50; Omega0N=104.7; OmegaN=102.83; nN=0.944; cos_phiN=0.92; zp=3; Rs=0.0178; Xs=0.118; Rr=0.0194; Xr=0.123; Xm=4.552; J=28; |
Ub=sqrt(2)*UsN; Ib=sqrt(2)*IsN; OmegasN=2*pi*fN; Omegab=OmegasN; Omegarb=Omegab/zp; Zb=Ub/Ib; Psib=Ub/Omegab; Lb=Psib/Ib; kd=1.0084; Mb=kd*PN/OmegaN; Pb=Mb*Omegarb; rs=Rs/Zb; lbs=Xs/Zb; rr=Rr/Zb; lbr=Xr/Zb; |
lm=Xm/Zb; SsN=3*UsN*IsN; ZetaN=SsN/Pb; ks=lm/(lm+lbs); kr=lm/(lm+lbr); Tj=J*Omegarb/Mb; betaN=(Omega0N-OmegaN)/Omega0N; wN=(1-betaN); lbe=(lbs+lbr+lbs*lbr*lm^(-1)); roN=0.9962; rrk=roN*betaN; le=lbs+kr*lbr; rs1=kr*rrk+rs; Ts1=le/rs1; Tm1=lm*(lbs+kr*lbr)/(rrk*kr*lbs); |
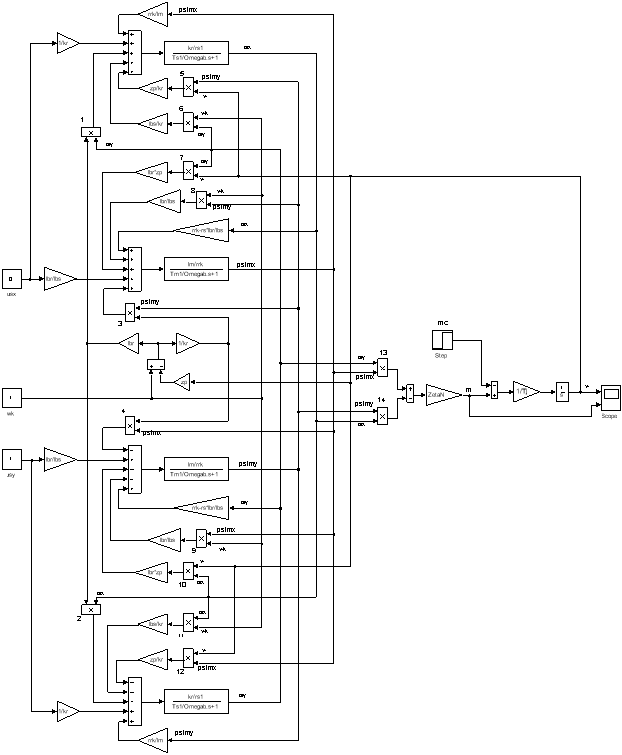
Рис. 9. Математическая модель асинхронного двигателя с переменными ψm – is на выходе апериодических звеньев
Результаты моделирования асинхронного двигателя представлены на рис. 10.
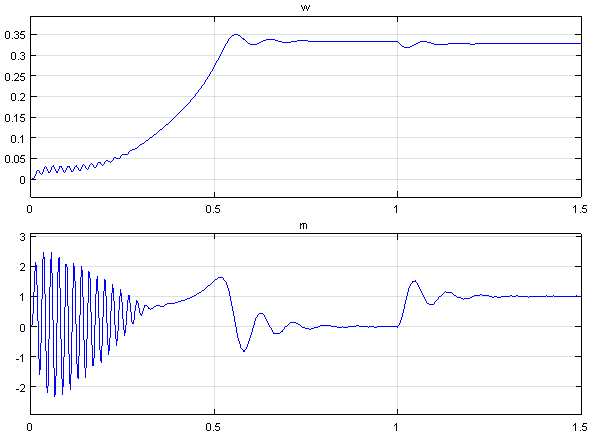
Рис. 10. Графики скорости и момента
Литература:
- Емельянов А. А., Козлов А. М., Бесклеткин В. В., Авдеев А. С., Чернов М. В., Киряков Г. А., Габзалилов Э. Ф., Фуртиков К. А., Реутов А. Я., Королев О. А. Пространственные векторы в асинхронном двигателе в относительной системе единиц // Молодой ученый. – 2015. – №11. – С. 133-156.
- Шрейнер Р. Т. Математическое моделирование электроприводов переменного тока с полупроводниковыми преобразователями частоты. – Екатеринбург: УРО РАН, 2000. – 654 с.
- Шрейнер Р. Т. Электромеханические и тепловые режимы асинхронных двигателей в системах частотного управления: учеб. пособие / Р. Т. Шрейнер, А. В. Костылев, В. К. Кривовяз, С. И. Шилин. Под ред. проф. д. т. н. Р. Т. Шрейнера. – Екатеринбург: ГОУ ВПО «Рос. гос. проф.-пед. ун-т», 2008. – 361 с.
