





Задача повышения достоверности данных, в том числе от первичных преобразователей (датчиков), является одной из наиболее важных в системах сбора и обработки информации. При этом наибольшую нестабильность вносят сенсоры и входные преобразователи восприятия информации. Применение одного из самых распространенных структурно-алгоритмических методов повышения точности — метода калибровки — требует прерывания взаимодействия с объектом, ограничивает использование метода. В методе прогнозирования такого недостатка нет, однако его применение требует значительных предварительных исследований. Индивидуальные зависимости нестабильности сенсора от влияющих величин описываются преимущественно сложными математическими функциями. Кроме того, индивидуальный характер прогноза вызывает проблемные вопросы, связанные со значительными случайными составляющими. В таких случаях целесообразно прогнозирование нестабильности сенсоров с помощью аппарата искусственных нейронных сетей (НС). Это особенно актуально для дистрибутивных сенсорных сетей, в которых используются разнородные сенсоры в различных условиях эксплуатации. Применение нейронных сетей для прогнозирования дрейфа сенсоров в дистрибутивной сенсорной сети рассмотрено ниже.
Использование нейронных сетей вдистрибутивной сенсорной сети. Интеллектуальная дистрибутивная сенсорная сеть (ИДСС) состоит из трех уровней обработки информации — сенсорных модулей нижнего уровня, интеллектуальных узлов обработки данных и компьютера-сервера верхнего уровня. Сенсорные модули превращают сигнал сенсора в код, но не имеют сетевых свойств. Поэтому целесообразно использовать расположенные вблизи сенсорных модулей интеллектуальные узлы, которые, во-первых, реализуют протоколы обмена данными с сенсорными модулями с одной стороны и сетью верхнего уровня с другой; во-вторых, реализуют все исполнительные операции интеллектуальных функций ИДСС относительно процесса восприятия информации.
Центральный компьютер (сервер) поддерживает функционирование всех компонентов системы, а главное — процедуры самоадаптации и самообучения в интересах интеллектуальных узлов. Его программное обеспечение состоит из программы-супервизора и специализированных программ пользователя. Основные функции программы-супервизора –инициализация сети, поддержка подключаемых интеллектуальных узлов, налаживания каналов восприятия информации и обеспечения заданной точности восприятия по всем каналам. Последнее базируется на прогнозировании нестабильности компонентов канала восприятия с помощью НС. Эффективность прогнозирования определяется качеством обучения НС и погрешностью вычисления прогнозируемых значений. Анализ процессов обучения и прогнозирования с помощью НС показал, что они несоизмеримы с требованиями к вычислительным ресурсам. Время персональных компьютеров Pentium-200 составляет от десятков секунд до десятков минут, а прогнозирование — десятки микросекунд. Обучение по алгоритму обратного распространения ошибки требует достаточного объема памяти и соответствующего процессора. Поэтому фазы обучения и прогнозирования целесообразно разделить: обучение выполнять на сервере, а прогнозирование — в интеллектуальном узле. Такое распределение вычислительных мощностей уменьшает потоки информации в сети и повышает ее живучесть. Алгоритм обучения нейронной сети на сервере ИДСС предлагается ниже.
Алгоритм обучения нейронной сети. Анализ показал, что для искусственного увеличения количества точек обучения НС могут использоваться следующие три группы данных:
– Реальные данные, которые формируются во время работы сенсора в составе ИДСС в реальных условиях использования;
– Исторические данные –представляют собой реальную нестабильность других сенсоров данного типа за предыдущие промежутки времени. В лучшем случае это нестабильность сенсоров в аналогичных условиях использования, в худшем — в близких условиях использования;
– Гипотетические данные — подаются как математические модели обобщенных дрейфов сенсоров этого или аналогичного типа (например, сенсоров, отличающихся по конструкции или номинальными параметрами). Они формируются по литературным источникам, результатами научно-технических исследований, информации производителя и тому подобное. Для обеспечения достаточно высокой доверительной вероятности допустимой погрешности ИДСС гипотетические данные должны отражать худшие варианты поведения функций дрейфа.
Обобщенный алгоритм, показывающий порядок первоначального использования этих трех групп данных, приведен на рис.1. Сначала анализируется тип имеющихся данных по иерархическому принципу, и в зависимости от результата, выполняются следующие процедуры:
– Объединение данных (при отсутствии реальных данных) — объединение исторических данных, хранящихся в архиве, с учетом условий эксплуатации сенсоров;
– Выбор гипотетической матмодели (при отсутствии исторических данных) с сложившейся ранее базы гипотетических данных о возможном дрейф сенсоров;
– Настройка НМ заключается в выборе базы знаний модели нейронной сети (количества нейронов, типа их функции активации, порога, весовых коэффициентов синапсов нейронов, количества уровней НМ и связей между нейронами) и алгоритма обучения, (согласно результатам анализа гипотетических данных) должны оптимально соответствовать будущему характера функции дрейфа конкретного сенсора;
– Передача обученной НС на нижний уровень предусматривает формирование соответствующего двоичного файла и реконфигурацию программного обеспечения интеллектуального узла.
Очевидно, что использование реальных данных обеспечивает высочайшую точность прогноза дрейфа. Однако их количество, особенно в начале эксплуатации сенсора, недостаточна для качественного обучения НС. Для замены реальных данных можно использовать исторические, но тогда точность прогноза ограничена случайной составляющей функции дрейфа сенсора и адекватностью условий получения исторических данных к условиям эксплуатации сенсора, дрейф которого прогнозируется. Поэтому необходимо постепенное вытеснение исторических данных реальными, в чем и заключается смысл самообучения ИДСС. Точность прогноза при использовании гипотетических данных еще ниже, поэтому они должны, по возможности, использоваться на начальном этапе эксплуатации сенсора.
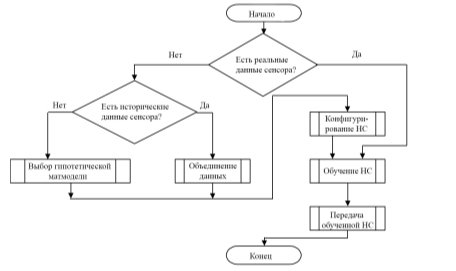
Рис. 1. Обобщенный алгоритм использования трех групп для обучения нейронной сети
Экспериментальные результаты. Использование исторических данных позволяет сделать достоверные выводы об эффективности прогнозирования, однако ограничивает их конкретными случаями имеющихся данных. Эти данные не позволяют исследовать возможности самообучения и адаптации ИДСС, сделать выводы о ее технических характеристиках и зависимости этих характеристик от поведения функции дрейфа сенсоров. Поэтому для исследования ИДСС целесообразно использовать гипотетические данные, которые должны отражать, по возможности, полную множество вариантов функций дрейфа сенсоров различного типа.
При проведении экспериментальных исследований гипотетическая нестабильность сенсоров моделировалась как сумма медленного дрейфа и различного вида внешних и внутренних помех. Медленный дрейф сенсора моделировался функцией квадратного корня. Детерминированы внутренние и внешние помехи моделировались с помощью суммы функций синуса различной амплитуды и частоты. Случайные помехи и случайная составляющая дрейфа сенсора моделировались с помощью генератора случайных чисел с равномерным (на интервале {0: 1}) и нормальным (математическое ожидание 0 и дисперсия 1) законами распределения.
Прогнозирование дрейфа сенсоров осуществлялось в системе MATLAB Neural Network Toolbox. Для прогнозирования использована модель трехуровневой персептрона, состоящая из 6 входящих, 10 скрытых нейронов с функцией активации гиперболического тангенса и одного выходного линейного нейрона. НМ училась на интервале {0:10} шаг обучающей выборки 0.1. Продолжительность обучения не превышала 180 эпох. Результаты обучения четырех исследуемых гипотетических функций приведены на рис.2–5. Прогнозируемые функции представлены под каждым рисунком, случайные составляющие распределены для функций рис. 2–4 согласно равномерным законом, а для функции рис.5 — по нормальному закону. Для функций рис. 2, 3 обучения НС осуществлялось в среднеквадратичной ошибке 10–2, для функций 4, 5 к — 10–3. Как видно из графиков, реальная и прогнозируемая кривые практически накладываются, относительная погрешность прогнозирования не превышает 2 %.
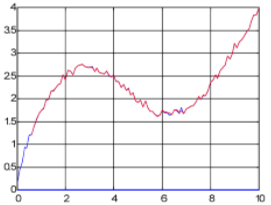
Рис. 2. Прогноз функции y=√x+sin(0.7x)+0.2rand
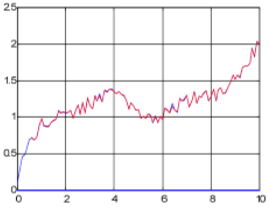
Рис. 3. Прогноз функции y=0.7√x+0.5sin(0.7x)+0.2rand
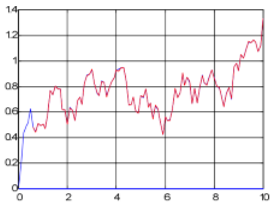
Рис. 4. Прогноз функции y=0.5√x+0.3sin(0.7x)+0.1sin(2x)+0.2rand
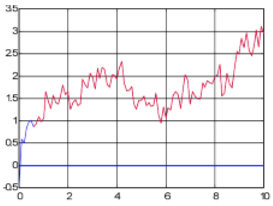
Рис. 5. Прогноз функции y=0.8√x+0.6sin(0.7x)+0.2sin(2x)+0.1sin(5x)+0.2rand
Выводы. Проведенные на группе гипотетических данных исследования и полученные результаты позволяют сделать вывод о возможности достижения высокой достоверности данных за счет прогнозирования нейронными сетями сложных функций дрейфа сенсоров со значительными случайными составляющими.
Литература:
- Горбань А. Н., Россиев Д. А. Нейронные сети на персональном компьютере. — Новосибирск: Наука. Сибирская издательская фирма РАН, 1996. — 276 с.
- Власов А. И. Аппаратная реализация нейровычислительных управляющих систем //Приборы и системы управления. 1999. 2. С. 6165.
- Власов А. И. Аппаратная реализация нейровычислительных управляющих систем // Приборы и системы. Управление, контроль, диагностика. — 1999. — № 2. — С. 61–65.
- Нейрокомпьютеры — архитектура и реализация // chipinfo. URL: http://www.chipinfo.ru/literature/chipnews/200005/34.html (дата обращения: 9.12.2016).
