





В статье рассмотрен шагающий робот, используемый для диагностики вредных примесей в воздухе.
Ключевые слова: робот, диагностика, датчик
Роботизация диагностики шахт и рудников является актуальной на сегодняшний день. Летального исхода на Воркутинских шахтах можно было бы избежать при использовании робота, способного определять загазованнность помещений. Он способен своевременно оповещать о повышении концентрации метана, опасного для жизни человека на конкретной территории.
Конструкция робота представляет собой паука (рис.1), который содержит в себе следующие подсистемы: газовый датчик, ультразвуковой датчик измерения расстояния, шагающий 8-ногий робот, система управления.

Рис 1. Корпус робота
Частью, обеспечивающей передвижение, является шагающий восьминогий робот. Шагающий робот — это машина относительно медленная в перемещении. Её скорость зависит от числа ног, которое имеет машина. Корпус робота вмещает все необходимые подсистемы робота и обеспечивает место для крепления 8 ног. При шагающем движении робот попеременно опирается на четыре из восьми ног: две несмежные ноги с одной стороны корпуса и две несмежные с другой. Корпус робота и расположение ног позволяют передвигаться по шахте. Для шагающего робота необходима нога, обеспечивающая контакт с землей в точке. Таким образом, можно использовать ногу с 3 степенями свободы.
У манипулятора робота имеется газовый датчик, который используется для обнаружения утечки газа в шахте. Данный датчик быстро распознает метан, природный газ, сжиженный природный газ, при этом он не реагирует на запах алкоголя и дыма.
При обнаружении роботом утечки газа, его местонахождение отмечается в базе данных системы. Затем следует анализ состава. В случае повышенной концентрации газа поступают сигналы тревоги.
Конструкция газового датчика показана на рис. 2, датчик состоит из керамической трубки, слоя, распознающего газ, измерительного электрода и нагревательной катушки, фиксируемых в корпусе сеткой из нержавеющей стали. Нагревательная пружина обеспечивает необходимые условия работы для чувствительных компонентов. Датчик имеет 6-контактов, 4 из них используются для распознавания сигналов, а оставшиеся 2 используются для подачи тока накаливания.
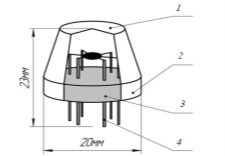
Рис. 2. Конструкция газового датчика
(1- Антивзрывная сеть, 2- Зажимное кольцо, 3- Смолистая база, 4- Ножки)
Для измерения расстояния до препятствия применяется бесконтактный ультразвуковой датчик. Используя ультразвуковые волны, он измеряет расстояние до объекта или просто обнаруживает препятствие на пути движения робота. На плате модуля размещается пьезоизлучатель ультразвука и воспринимающий отраженную волну микрофон.
Принцип действия локационного датчика показан на рис.3.
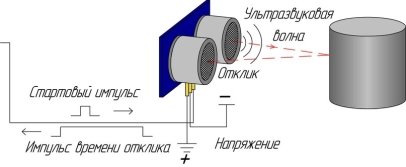
Рис. 3. Принцип действия ультразвукового датчика
Датчик отправляет ультразвуковые импульсы и слушает отклик. На цифровой вход для включения измерения датчика подаем импульс высокого уровня длительностью 10–15 микросекунд. Датчик отправляет ультразвуковой сигнал из восьми коротких импульсов частотой выше предела диапазона слуха человека. Электроника датчика знает скорость звука в воздухе. Измеряя время между отправленным и принятыми сигналами ультразвука, датчик формирует выходной сигнал.
Спустя примерно микросекунду ультразвуковой датчик сигнализирует на выходе «Отклик» — импульс высокого уровня длительностью до 38 миллисекунд. Если препятствий не обнаружено, то на выходе будет сигнал с длительностью 38 мс. Таким образом, для работы с датчиком от электроники прибора требуется один цифровой управляющий выход и один вход для сигнала датчика. Длина импульса на выходе «Отклик» пропорциональна расстоянию до препятствия. Расстояние вычисляется по формуле: ![]() , где S — расстояние в сантиметрах, F — продолжительность импульса в микросекундах.
, где S — расстояние в сантиметрах, F — продолжительность импульса в микросекундах.
Выводы:
Робот можно применять для исследования шахт и рудников в процессе работы шахтеров для диагностики загазованности пространства.
В настоящее время существует необходимость заблаговременного обнаружения и устранения утечки или наличия газа, поэтому робототехническая операция актуальна для проведения подобного рода работ.
Возможно использование в труднодоступных местах шахты или рудника для точного мониторинга состояния безопасности участка. В этом случае робот имеет преимущество перед другими видами контроля.
Литература:
- Поезжаева Е.В// Промышленные роботы: учеб. пособие: в 3 ч. / Е. В. Поезжаева. — Пермь: Изд-во Перм. Гос. техн. ун-та, 2009.-Ч.2.-185.
- Поезжаева Е. В., Новикова А. А., Поликарпова К. Н., Сайкинова В. А.,Робот для диагностики вредных примесей в воздухе // Строительные и дорожные машины. — 9/2016. — С. 43–45.
