





В настоящее время научно-техническое развитие способствует формированию новых технических систем компьютерного зрения, как одного из существенных направлений человеко-машинного взаимодействия. Одной из главных задач данных систем является задача распознавания объектов. При успешных решениях задач обнаружения будут развиваться технические производственные системы, которые смогут интеллектуально распознавать внешнюю среду и выполнять в ней некоторые действия [1]. Так же решение задач детектирования позволит развивать современные системы телевидения, системы идентификации, зрение роботов, компьютерные анимации и труднодоступные для человека глубоководные и космические системы.
Для разработки систем детектирования образов предлагается рассмотреть более детально процесс обнаружения объектов на изображении, как один из частных задач распознавания. Данные системы разрабатываются для того, чтобы обнаруживать объект на участках недоступных человеку, а также в современных системах телевидения и компьютерного зрения, это обусловлено отсутствием, так называемого «человеческого фактора», скоростью работы системы и обработки информации. Сущность существующей системы процесса обнаружения объектов на изображении состоит в том, что в систему поступают входные данные в виде изображения, на котором необходимо отследить тот или иной объект. После процесса выходными данными являются изображения с обнаруженным объектом, некая модель обнаружения объекта и результаты проведенного обнаружения.
Процесс обнаружения объектов (рис.1) состоит в том, что рассматриваются существующие методы детектирования, строится алгоритм, по которому будет проходить обнаружение объекта, создается механизм, в зависимости от метода, затем происходит процесс нахождения объекта на изображении и проводится анализ результатов для последующей работы. Управляющими документами будут существующие алгоритмы детектирования, методика обнаружения объектов и регламент тестирования (т. е. обнаружения). Для проведения данного процесса необходимы некоторые измерительно-вычислительные приборы, персональный компьютер, программные средства, позволяющие эффективно работать с задачей обнаружения, а так же человек, который занимается данным процессом [4].
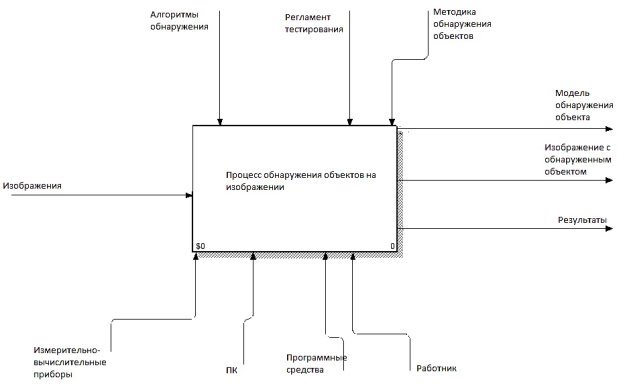
Рис. 1. Процесс обнаружения объектов на изображении
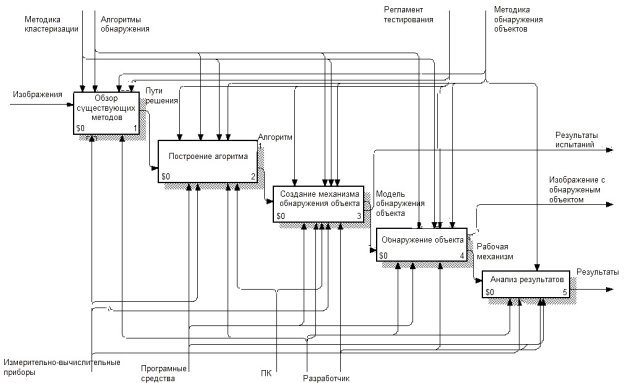
Рис. 2. Подпроцесс обнаружения объектов на изображении
Рассмотрим более детально подпроцесс обнаружения объектов на изображении. Подпроцесс состоит из пяти функций: обзор существующих методов, построение алгоритма для дальнейшей работы, разработка механизма обнаружения объекта, затем функция обнаружения объекта и анализ полученных результатов. Управляющие документы и необходимые инструменты такие же, как у основной функции [4]. Данный подпроцесс показан на рисунке 2.
В результате построения структурной и операционной модели процесса обнаружения объектов был выявлен ряд недостатков, который необходимо исправить. Проведя структурный анализ, выявлены следующие проблемы:
‒ Процесс происходит в условиях искажений, связанных с помехами и сжатием сигнала изображения;
‒ Низкий объем обрабатываемой информации;
‒ Низкие требования к качеству обработки изображений;
‒ Большая погрешность обнаружения объекта на изображении;
‒ Процесс содержит «человеческий фактор».
Выявив проблемы в ходе работы, предлагается сфокусировать внимание на одном важном этапе, а именно — модифицировать и разработать алгоритм кластеризации в машинном обучении, используя данные полученные с устройства eye-tracker [3] и разработать автоматизированную систему (АС) для обнаружения объектов на изображении.
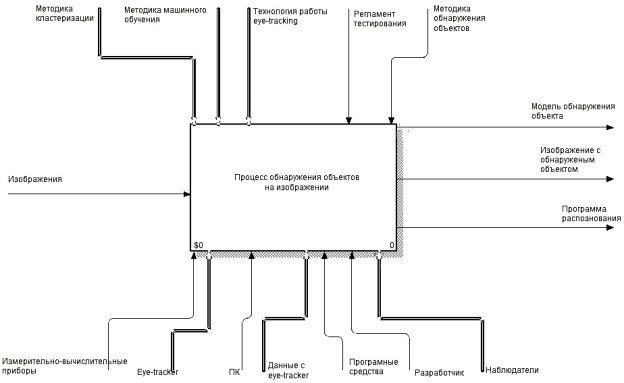
Рис. 3. Обновленный процесс обнаружения объектов на изображении
Процесс обнаружения объектов на изображении становится видоизмененным, так как используются информационные технологии и усовершенствованный математический аппарат. Входными данными для процесса будут являться изображения, выходными данными будут: некоторая модель обнаружения объектов, непосредственно изображения с обнаруженным объектом и программа распознавания объектов. Для обновленного процесса добавляется устройство eye-tracker [3], вместе с данными, которые снимает устройство, а также наблюдатели — респонденты, которые позволят обнаружить объект. К управляющим документам добавляется технология работы с устройством, а также методика кластеризации и машинного обучения. Данная методика основана на методах машинного обучения без учителя, то есть непосредственно проводится кластерный анализ, с использованием методов k-среднее и EM-алгоритм. Остальные управляющие документы остаются прежними. Обновленный процесс представлен на рисунке 3.
Процесс обнаружения объектов состоит из пяти функций: обзор существующих методов, построение алгоритма, проведение испытаний, разработка среды обнаружения объектов, апробация среды. Входными данными для процесса будут являться изображения, выходные данные: некоторая модель обнаружения объектов, изображения с обнаруженным объектом и программа распознавания объектов. Управляющее воздействие выполняют следующие документы: методика кластеризации, методика машинного обучения, технология работы с устройством eye-tracker, регламент тестирования и методика обнаружения объектов. Для осуществления данного процесса необходимы измерительно-вычислительные приборы (ИВП), eye-tracker, программные средства для обработки изображений, персональный компьютер (ПК), а также персонал, в данном случае разработчик и респонденты для проведения испытаний [4]. Процесс показан на рисунке 4.
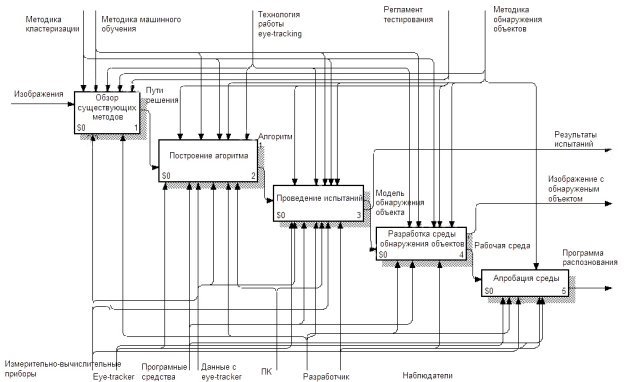
Рис.4. Обновленный подпроцесс обнаружения объектов на изображении
Опишем более подробно функцию разрабатываемой АС. На вход системы поступают изображения формата JPEG или PNG, которые поставляет заказчик. Они располагаются на ПК, входящего в АС, и загружаются в нее путем использования интерфейса разработанной программы. Первый этап подпроцесс заключается в подфункции «сбора информации» — загрузка изображения в программу. Далее происходит обработка, на этом этапе изображение проходит стадию преобразования формата, а так же масштабирование обучающих фрагментов до единого разрешения. Далее идет этап вычисления набора признаков, на котором совершается генерация по случайному закону матрицы коэффициентов. На четвертом этапе происходит обучение модели: вычисление признака для всех обучающих фрагментов, как суммы по строкам и столбцам поэлементного произведения матрицы изображения на матрицу и вычисление целевой функции оптимизации, как отношения квадрата разности, средних значений признака, вычисленных для наборов обучающих изображений. Так же на четвертом этапе в цикле до достижения фиксированного максимального значения итераций происходит генерация по случайному закону матрицы внутри фиксированной окрестности матрицы, вычисление признака для произвольного обучающего фрагмента и рассечет целевой функции, переход в другую точку и сохранение по истечении некоторого заданного числа итераций матрицы коэффициентов. В конце подфункции переход к генерации последующего признака [1]. На конечном этапе происходит принятие решения. В данной функции участвует разработчик, используется ПК и ИВП. Процесс регулируется методикой обнаружения объектов. На выходе автоматизированной системы имеем обнаруженный объект.
В заключении отметим, что разработка структурных и операционных моделей процесса обнаружения объекта на изображении позволит в дальнейшем разработать автоматизированную систему детектирования объектов, описать различные виды обеспечения и требования системы.
Литература:
- Голубев М. Н. Разработка и анализ алгоритмов детектирования и классификации объектов на основе методов машинного обучения // диссертация — 2012.
- Dim P. Papadopoulos, Alasdair D. F. Clarke, Frank Keller, Vittorio Ferrari Training object class detectors from eye tracking data, 2015 С.16
- Eye-Com Corporation [Электронный ресурс]. — URL: http://eyecomcorp.com
- Марка Д., Макгроуэн К. — Методология структурного анализа и проектирования: Пер. с англ.-М.:1993, С. 240
