





Приведены сведения по динамике грузоподъемного крана. Даны рекомендации по повышению устойчивости грузоподъемного крана.
Динамика колебательного процесса подъемного механизма стрелового крана рассматривается как система состоящая из массы груза, массы крана, массы ротора электродвигателя и элементов подъемного механизма, связанных между собой упругими звеньями и жесткостями подъемных канатов и металлоконструкции крана. В работе [4] сделано допущение, что упругость металлоконструкции значительно выше упругости каната. Эта обоснованность подтверждается экспериментально. При указанных допущениях подъем груза производится путем выбора слабины каната, упругой деформации всех элементов конструкции и отрыве с места.
Максимальные динамические нагрузки появляются при отрыве груза.
Процесс подъема груза механизмом подъема стоит из:
− выборки зазоров в канате;
− отрыва груза от земли;
− движения груза в установившемся режиме работы.
На рисунке 1 приведена двухмассовая динамическая схема подъема груза краном.
Груз поднимается поступательно в режиме неустановившегося движения. На первом этапе выбирается зазор Δ.
Процесс выборки зазоров описывается системой уравнений
 ,
,
 (1)
(1)
![]() .
.
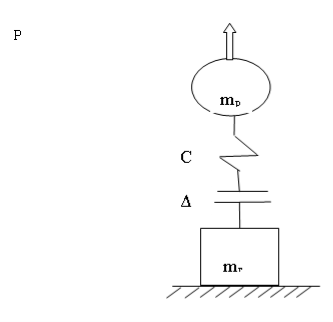
Рис. 1. Двухмассовая динамическая схема подъема груза: mг, масса груза и грузозахватного органа; mр — приведенная масса вращающихся частей привода; Δ — зазоры в механизме; С — коэффициент упругости полиспаста
На втором этапе в упругой связи возникает нагрузка F
 ,
,
 (2)
(2)
где xг, xр — перемещение груза и ротора привода; F — избыточная сила механизма.
 ,(3)
,(3)
 ;
; Избыточная сила механизма в виде синусоидальной составляющей амплитуды создает наиболее тяжелый нагрузочный режим. Появление синусоидальной составляющей не только увеличивает наибольшую динамическую нагрузку, но и может привести к качественным изменениям в характере движения оборудования крана. Для снижения динамической нагрузки требуется гашение колебаний в системе. При введении системы гашения наибольшая нагрузка упругого ускоренного подхвата определяется:
Р =abs(exp(-кu)Аsin(ωu))(4)
где ω — круговая частота колебаний; u — время протекания процесса.
Наибольшая нагрузка равномерного подхвата:
![]() (5)
(5)
где V — скорость подъема груза.
Для кранов, у которых соотношение массmр >= тг формула определения наибольшей нагрузки
 (6)
(6)
При определении нагрузки несостоявшегося подъема, такая нагрузка обычно аварийная, уравнение движения в этом случае:
![]() .(7)
.(7)
где mк — масса крана; mг — масса груза; с жестокость полиспаста; x — перемещение груза.
Обозначив  и
и  (8)
(8)
Имеем решение этого уравнения:
![]() .(9)
.(9)
Максимальное усилие подъема будет при ![]()
 ,(10)
,(10)
где  .
.
Этим выражением определяется динамическая загрузка как каната так и любого упругого элемента механизма подъема.
При подъеме груза с учетом податливости металлоконструкции стрелы крана динамическая модель системы приведена на рис. 2.
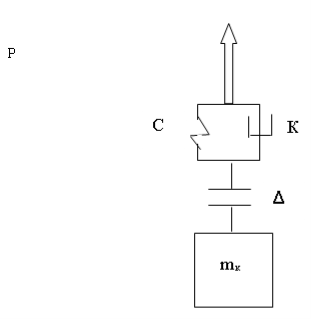
Рис. 2. Динамическая модель рабочего оборудования крана
При анализе динамики колебательного процесса, происходящего при подъеме груза с учетом податливости металлоконструкции приняты слудующие допущения.
- Масса крана и груза рассматривается как общая масса.
- Упругость металлоконструкции значительно больше упругости канатов и привода механизма.
Обоснованность таких допущений подтверждается экспериментально [4].
Подъем груза при принятых допущениях производится следующим образом.
Первый этап. После включения двигателя происходит выборка зазоров в канате.
Второй этап. Происходит упругая деформация всех элементов конструкции. Это продолжается пока усилие на крюке не станет равным грузоподъемности.
Третий этап. Подъем груза.
За обобщенную координату X принимается перемещение Xк массы крана mk, обладающей жесткостью kk.
Первый этап описывается уравнениями
 ,(11)
,(11)
![]() .
.
На втором этапе уравнение подъема груза имеет вид:
 .(12)
.(12)
В момент отрыва груза усилие подъема определится по уравнению:
Р =abs(exp(-u)Аsin(ω u))(13)
где ω — частота колебаний груза; ` u — время отрыва груза.
На третьем этапе усилие подъема груза равно грузоподъемности. Движение груза описывается уравнением гармонических колебаний. Уравнение подъема груза имеет вид
 .(14)
.(14)
Полная нагрузка на крюк равна сумме статической и динамической
 .(15)
.(15)
где 
Выводы.
Грузовая устойчивость грузоподъемного крана в области граничного равновесия обеспечивается рациональным сочетанием динамических свойств привода, полиспаста, металлоконструкции стрелы и времени срабатывания тормозной системы.
Литература:
- Емельянов Р. Т., Прокопьев А. П., Турышева Е. С., Постоев П. А. Реализация нейросетевого контроллера для управления организационно-технологическим комплексом // Вестник Сибирского аэрокосмического университета. 2011. Вып. 1. С. 20–24.
- Емельянов Р. Т, Спирин Е. С., Кириллов К. В., Циганкова А. В. Исследование автоматической системы управления с пропорционально-интегрально-дифференциальным регулированием // Вестник Красноярского государственного аграрного университета. № 10. 2013. с. 243–247.
- Емельянов Р. Т., Султанов Н. С., Закурдаев А. В., Скурихин Л. В. Моделирование динамики регулируемого гидромотора // Вестник Красноярского государственного аграрного университета, № 8, 2014. с. 181–185.
- Терехова И. И. Управление системой устойчивости башенного крана/ И. И. Терехова, Р. Т. Емельянов. // Совершенствование машин и ресурсосберегающих технологий: Межвуз. сб. науч. ст. – КФ Иркутский ГУПС, 2005. С. 36–44.
