





В статье рассматриваются системы типа «человек-машина», используемые для обучения. Приведена классификация таких систем. Обозначена важная роль инженерно-психологического обеспечения комплекса мероприятий, связанных с использованием обучающих человеко-машинных систем. Указаны особенности циклов проектирования, создания и эксплуатации обучающих человеко-машинных систем.
Ключевые слова: информационные системы, информационное взаимодействие, человеко-машинные системы, обучающие системы
Современные информационные системы обладают рядом общих признаков сложных организационно-технических систем искусственного происхождения. Основными из этих признаков являются [1, с. 17]:
‒ наличие целевых задач, определяющих желаемые результаты, которые должны быть получены в процессе функционирования информационной системы;
‒ большое количество объектов информационного взаимодействия и разнообразие решаемых целевых задач (многофункциональность);
‒ стохастический характер процессов информационного взаимодействия внутри системы между ее элементами и системы с объектами внешней среды;
‒ разветвленность структуры и пространственная распределенность элементов информационной системы;
‒ эволюционный характер процессов создания и модернизации информационных систем.
Для систем, используемых в процессе обучения, важными являются такие их признаки, как:
‒ цели и характер информационного взаимодействия с объектами внешней среды;
‒ способы взаимодействия с внешними объектами;
‒ общие структурные характеристики и внутренние процессы информационного взаимодействия.
Как правило, информационные системы создаются для достижения следующих целей:
‒ передача информации;
‒ извлечение информации;
‒ разрушение информации;
‒ информационная поддержка управления.
Согласованное информационное взаимодействие подразумевает единство целей, возникающих при функционировании информационной системы и объектов взаимодействия. Оно характеризуется наличием достаточно полных сведений об условиях, параметрах и характеристиках каналов передачи информации (больше подходит для систем передачи информации). Индифферентное информационное взаимодействие реализуется в ситуации безразличия участвующих в нем объектов по отношению к процессу получения информации об их состояниях в информационной системе (характерно для систем извлечения информации). Конфликтное информационное взаимодействие отличается наличием антагонизма целей участников взаимодействия. Это связано с реализацией одной из сторон (или обеими сторонами) специальных мероприятий по сокрытию или искажению информации, призванных затруднить работу другой стороны (относится к системам разрушения и извлечения информации) [1, с. 19–20].
Обучающие информационные системы — это такие, которые включают программно-методические комплексы с методической, учебной и организационной поддержкой процесса обучения, проводимого на базе информационных технологий. Они могут решать следующие задачи:
‒ задачи, связанные с регистрацией и статистическим анализом усвоения учебного материала (определение времени выполнения заданий, определение общего числа ошибок и т. д.),
‒ задачи управления учебной деятельностью;
‒ задачи, связанные с проверкой уровня знаний, умений и навыков учащихся до и после обучения, их индивидуальных способностей и мотивации;
‒ задачи автоматизации обучения, связанные с подготовкой и предъявлением учебного материала, адаптацией материала по уровням сложности, подготовкой динамических иллюстраций, контрольных заданий, лабораторных работ, самостоятельных работ учащихся и т. п.;
‒ задачи администрирования системы, доставки учебного материала на учебные места;
‒ задачи обратной связи с учащимися.
Под программным обеспечением таких систем в рамках этой статьи мы будем иметь в виду компьютерные программы, реализующие учебные компьютерные модели [4], тренажеры, тесты и т. п., а также другие, в том числе обеспечивающие функционирование компьютера (операционные системы, драйверы и т. п.). Ясно, что компьютеризированное обучение реализуются с помощью программных и аппаратных средств. Программное обеспечение можно выделить в отдельный компонент, обеспечивающий взаимодействие, происходящее внутри системы (рис. 1, 2). Аппаратная часть является посредником между человеком и программным обеспечением.
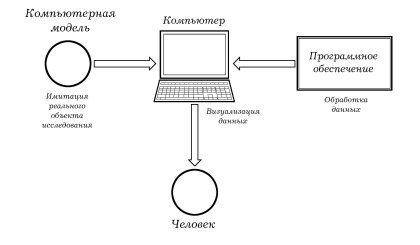
Рис. 1. Прямая связь в обучающей человеко-машинной системе
Перед тем, как перейти к рассмотрению обучающих систем «человек-машина», приведем сначала общую классификацию всех таких систем, в которую входят и обучающие системы.
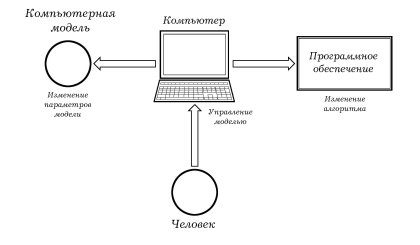
Рис. 2. Обратная связь в обучающей человеко-машинной системе
По целевому назначению можно выделить следующие классы систем «человек-машина»:
‒ управляющие, в которых основной задачей человека является управление машиной;
‒ обслуживающие, в которых человек контролирует состояние машинной системы;
‒ обучающие, или вырабатывающие у человека определенные умения и навыки;
‒ информационные, обеспечивающие поиск, накопление или получение необходимой для человека информации;
‒ исследовательские, используемые при анализе тех или иных явлений, поиске новой информации, новых знаний.
Три последних типа систем относятся к системам, которые могут использоваться в современном образовании. При определенных условиях их можно объединить в один класс, который можно назвать «обучающие системы» (при этом в него вкладывается более общий смысл образовательной системы). Машина в обучающей системе превосходит обучающего человека по следующим параметрам:
‒ быстрота ответа на сигнал;
‒ выполнение повторных стереотипных действий и задач;
‒ хранение информации в сжатой форме и полное освобождение от ненужной информации;
‒ скорость расчетов;
‒ способность выполнять одновременно несколько различных функций.
При разработке обучающих человеко-машинных систем необходимо применять системный подход, а именно: выяснять взаимосвязи и свойства совокупности объектов, входящих в систему [5]. Необходимо помнить, что человек в такой системе плохо обучается как при дефиците, так и при избытке времени и информации. Система должна быть создана такой, чтобы обучающийся мог непрерывно принимать участие в ее функционировании на уровне, соответствующем его возможностям. Низкий уровень интереса к учебе и морального состояния обучающегося может быть связан с двумя причинами: 1) когда машина требует высокой образованности от низкообразованного обучающегося; 2) когда машина требует низкой образованности от высокообразованного обучающегося. Стоит отметить, что максимальная автоматизация не всегда полезна; активность обучающегося должна занимать центральное место в системе. В связи с этим, задача создания обучающей системы «человек-машина» состоит не в том, чтобы показать, что система поддается высокой автоматизации, а в том, чтобы доказать, что она нуждается в ней. В связи с этим, можно говорить о том, что современные методисты зачастую злоупотребляют автоматизацией (компьютеризацией) обучения, используя ее там, где она совсем не нужна. Кроме того, машинная часть обучающей системы не всегда применяется для полного вытеснения и замены учителя, а, в первую очередь, для увеличения «мощности» обучения.
Важным качеством современных обучающих систем является интерактивность, в них передача и обмен информацией происходят в режиме диалога. Темп обмена при этом должен быть соизмерим с темпом обработки данных человеком.
Особенность управляющих и обслуживающих человеко-машинных систем, упомянутых ранее, заключается в том, что объектом целенаправленных воздействий в них является машинная часть системы. В обучающих человеко-машинных системах направление воздействий противоположное: они ориентированы на человека. Возможно создание и таких систем, в которых воздействие имеет и ту, и другую направленность.
По количественной характеристике человеческой составляющей систем «человек-машина» можно выделить два их класса:
‒ моносистемы, в состав которых входит один человек и одно или несколько технических устройств;
‒ полисистемы, в состав которых входит некоторая общность людей и взаимодействующие с ней одно или несколько технических устройств.
Полисистемы можно разделить на одноуровневые и многоуровневые. В одноуровневых системах при взаимодействии людей с машинными компонентами не устанавливается какая-либо подчиненность и приоритетность отдельных членов коллектива. В отличие от этого в многоуровневых (или иерархических) системах устанавливается организационная (или приоритетная) иерархия взаимодействия [3].
По типу и структуре машинного компонента можно выделить инструментальные человеко-машинные системы, в состав машинной части которых входят инструменты и приборы [2]. Такие системы могут использоваться в обучении физике, математике, химии, биологии и другим естественнонаучным дисциплинам.
Другим важным типом являются сложные человеко-машинные системы, включающие помимо человека некоторую совокупность связанных, но различных по своему функциональному назначению, программируемых устройств, предназначенных для осуществления какой-то сложной деятельности. В этих системах, как правило, связанность всего технологического процесса обеспечивается локальными системами автоматического управления. В задачу человека в таких системах входит общий контроль за ходом технологического процесса, изменение режимов работы, оптимизация, настройка, пуск и остановка отдельных частей процесса. К таким системам можно отнести современные электронные образовательные среды.
Еще более сложным типом являются системотехнические комплексы. Они представляют собой сложную техническую систему, в которой присутствуют не полностью детерминированные связи и коллектив людей, участвующих в ее использовании. Для систем такого типа характерным является взаимодействие не только по связи «человек-машина», но и по линиям типа «человек-человек-машина», «человек-машина-человек» и т. п. Другими словами, в процессе деятельности человек взаимодействует внутри системы не только с техническими устройствами, но и с другими людьми. При всей сложности системотехнических комплексов их в большинстве случаев можно представить в виде иерархии более простых человеко-машинных систем. К ним относятся автоматизированные комплексы управления процессом обучения, включающие, в том числе, и электронные образовательные среды.
В основу классификации систем по типу взаимодействия человека и машины может быть положена степень непрерывности этого взаимодействия. По этому признаку различают системы непрерывного и эпизодического взаимодействия. Последние, в свою очередь, делятся на системы регулярного и нерегулярного взаимодействия. В них информационные взаимодействия определяются характером решаемых задач, то есть режимы взаимодействия во времени регламентируются характером и объемом машинных вычислений.
Однако несмотря на большое разнообразие обучающих систем «человек-машина», они имеют целый ряд общих черт и особенностей. Эти системы являются, как правило, динамическими, целеустремленными, самоорганизующимися и адаптивными.
Обучающие системы «человек-машина» относятся к классу динамических систем, то есть систем, состоящих из связанных и взаимодействующих элементов различной природы и характеризующихся изменением во времени структуры и взаимных связей. Из этого следуют характерные особенности, присущие сложной динамической системе:
‒ разветвленность структуры (или информационных связей) между элементами (человеком и машиной);
‒ разнообразие природы элементов (в состав могут входить человек, коллектив людей, автоматы, машины, комплексы машин и т. д.);
‒ гибкость структуры и изменение связей между элементами;
‒ автономность элементов, то есть способность их самостоятельно выполнять часть своих задач.
Как уже было сказано ранее, обучающие системы «человек-машина» относятся также к классу целеустремленных систем. Считается, что система является целеустремленной, если она продолжает преследовать одну и ту же цель, изменяя свое поведение при изменении внешних условий. Существенной особенностью таких систем является их способность получать требуемые результаты различными способами. Системы этого класса могут изменять свои задачи и выбирать средства их реализации. Целеустремленность системы обусловлена тем, что в нее включен человек, — он ставит цели, определяет задачи и выбирает средства достижения цели.
Обучающие системы «человек-машина» можно рассматривать также и как адаптивные системы. Их свойство адаптации заключается в приспособлении системы к изменяющимся условиям обучения, и в результате — в изменении режима функционирования в соответствии с новыми условиями. Для повышения эффективности системы предусматривается возможность адаптации как внутри самой системы, так и по отношению к внешней среде. Еще недавно это свойство реализовалось благодаря приспособленности человека, гибкости и возможности изменения его поведения в зависимости от конкретной обстановки. Сейчас же речь идет о создании систем, в которых свойство адаптации реализуется путем соответствующего технического решения. Можно говорить о создании таких технических средств, которые могут изменять свои параметры и условия деятельности в зависимости от текущего конкретного психофизиологического состояния человека и показателей эффективности его деятельности.
Наконец, обучающие системы «человек-машина» можно отнести к классу самоорганизующихся систем, то есть систем, способных к уменьшению неопределенности после вывода их из устойчивого, равновесного состояния под действием различного рода факторов. Это свойство обусловлено целенаправленной деятельностью человека, способностью его планировать свои действия, принимать правильные решения и реализовывать их в соответствии с возникшими обстоятельствами. Способность к адаптации и самоорганизации определяет такое важное свойство систем «человек-машина», как их живучесть, которая определяется длительностью периода их массовой эксплуатации.
Из всего сказанного видно, что рассмотренные особенности систем определяются наличием в их составе человека.
В заключении скажем несколько слов о таком новом направлении в науке, как инженерная психология. Иногда ее считают чисто проектировочной отраслью. Действительно, проектировочная сущность инженерной психологии имеет в настоящее время большое значение. Однако этим не ограничивается круг задач, решаемых этой дисциплиной. Для того чтобы был реализован весь потенциал обучающих возможностей систем «человек-машина», необходим правильный учет инженерно-психологических требований к таким системам в процессе их создания и применения. При этом под инженерно-психологическим обеспечением понимаются все мероприятия, связанные с организацией учета человеческого фактора в процессе проектирования, производства и эксплуатации систем. В проблеме инженерно-психологического обеспечения можно выделить два аспекта: целевой и организационно-методический, как это показано в табл. 1.
Таблица 1
Инженерно-психологическое обеспечение обучающих систем «человек-машина»
|
Этап жизненного цикла |
Целевой аспект |
Организационно-методический аспект |
|
Проектирование |
Определение функций обучающегося и оценка его психофизиологических возможностей |
Разработка справочно-методических материалов по проектированию деятельности обучающегося. Организация труда создателя обучающих программ |
|
Создание |
Учет психофизиологических свойств обучающегося в процессе обучения (условия обучения, режимы обучения, взаимосвязь обучающихся) |
Разработка нормативных материалов по учету человеческого фактора в обучении |
|
Эксплуатация |
Учет психофизиологических возможностей обучающегося при использовании техники (организация обучения) |
Разработка методик обучения. Разработка нормативных документов, регламентирующих применение этих методик |
Литература:
- Алгазинов Э. К. Анализ и компьютерное моделирование информационных процессов и систем / Э. К. Алгазинов, А. А. Сирота; Под общ. ред. А. А. Сироты. — М.: Диалог-МИФИ, 2009. — 416 с.
- Данилов О. Е. Автоматизация учебных экспериментальных исследований / О. Е. Данилов // Дистанционное и виртуальное обучение. — 2014. — № 12. — С. 43–49.
- Данилов О. Е. Обучение в человеко-машинных системах / О. Е. Данилов // Дистанционное и виртуальное обучение. — 2015. — № 2. — С. 84–90.
- Данилов О. Е. Создание систем виртуальной реальности для обучения физике / О. Е. Данилов // Дистанционное и виртуальное обучение. — 2015. — № 4. — С. 20–27.
- Данилов О. Е. Эргономика обучающих человеко-машинных систем / О. Е. Данилов // Дистанционное и виртуальное обучение. — 2016. — № 8. — С. 25–31.
