





Наиболее применяемые последовательные интерфейсы. За долгие годы их использования разработано большое количество изделий, элементная база, программные модули.
Стандарты на эти интерфейсы имеют статус рекомендуемых, поэтому часто возникают проблемы в стыковке изделий разных производителей. Благодаря очень простой реализации, эти проблемы легко решаются.
Популярность интерфейсов RS232, RS485 и RS422 определяется невысокой стоимостью портов и кабелей, а также стабильностью использования данных стандартов в различных областях техники, в течение длительного времени, разными производителями. Поддерживаются асинхронный и синхронный режимы обмена данными.
Таблица 1
Наименования и назначения сигналов интерфейса RS232C
|
Наименование* |
Назначение |
|
PG (Protected Ground) |
Защитная земля |
|
SG (Signal Ground) |
Сигнальная земля |
|
TD (Transmit Data) |
Данные. От контроллера к оконечному устройству |
|
RD (Receive Data) |
Данные. От оконечного устройства к контроллеру |
|
RTS (Request To Send) |
Запрос передачи данных. Сигнал готовности данных для передачи из контроллера к оконечному устройству. В полудуплексном режиме используется для управления направлением передачи данных |
|
CTS (Clear To Send) |
Готовность регистра приёма оконечного устройства |
|
DSR (Data Set Ready) |
Готовность оконечного устройства к обмену данными |
|
DTR (Data Terminal Ready) |
Готовность контроллера к обмену данными |
|
DCD (Data Carrier Detected) |
Готовность удалённой аппаратуры оконечного устройства к обмену данными |
|
RI (Ring Indicator) |
Прерывание от оконечного устройства |
Интерфейс RS232 построен на униполярных линиях передачи данных. Поэтому его производительность и максимальная длина кабеля невелики. RS232 применяется для подключения периферийного оборудования к персональным компьютерам. Кабельное хозяйство этого интерфейса недорогое, что даёт возможность использовать отдельные линии для квитирования, синхронизации и прерывания. RS232 является радиальным интерфейсом, поэтому понятие адреса в нём отсутствует. Эти факторы способствуют повышению эффективности работы интерфейса в системах сбора данных и с периферийным оборудованием
Наименования указаны в соответствии с документацией на интерфейс RS232C. Аналогичные ему интерфейсы RS232 и «Стык-2» имеют менее мнемоничные наименования сигналов.
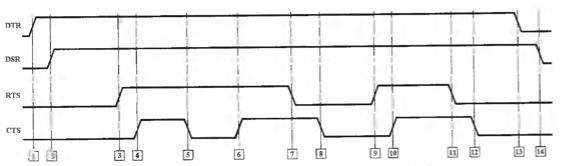
Рис. 1. Последовательность управляющих сигналов интерфейса RS232C
На рис. 1. показана последовательность управляющих сигналов интерфейса RS232C. Она имеет следующий физический смысл:
- Установкой DTR контроллер указывает на желание использовать оконечное устройство.
- Установкой DSR оконечное устройство сигнализирует о своей готовности к работе.
- Установкой RTS контроллер запрашивает разрешение на передачу и заявляет о своей готовности принимать данные от оконечного устройства.
- Установкой CTS оконечное устройство уведомляет о своей готовности к приёму данных.
- Снятием CTS оконечное устройство сигнализирует о невозможности дальнейшего приёма (например, буфер приёма заполнен) — контроллер должен приостановить передачу данных.
- Установкой CTS оконечное устройство разрешает компьютеру продолжить передачу (например, в буфере появилось место).
- Снятием RTS контроллер информирует оконечное устройство о своей неготовности к обмену данными. Это может означать как заполнение буфера приёма контроллера, так и отсутствие данных для передачи в оконечное устройство.
- Оконечное устройство подтверждает снятие RTS снятием CTS.
- Контроллер повторно устанавливает RTS для возобновления обмена данными.
- Оконечное устройство подтверждает готовность к обмену установкой CTS.
- Снятием RTS контроллер указывает на завершение обмена.
- Оконечное устройство подтверждает снятие RTS снятием CTS.
- Контроллер снимает DTR для перевода оконечного устройства в автономный или «спящий» режим.
- Оконечное устройство подтверждает снятие DTR снятием DSR.
На линиях обмена данными в промежутки времени 4–5, 6–7 и 10–11, когда разрешён обмен, циркулируют последовательные данные. Они передаются побайтно. Для синхронизации приёмника с передатчиком и отделения байтов друг от друга в поток вставляются стартовые и стоповые биты.
Литература:
- Локотков А. Интерфейсы последовательной передачи данных. Стандарты EIA RS-422A/RS-485 // СТА. № 3,1997.
- Стешенко В. Проектирование устройств обработки сигналов.
- Интерфейсы систем обработки данных: Справочник / А. А. Мячев, В. Н. Степанов В. К. Щербо; Под ред. А. А. Мячева. — М.: Радио и связь,1989.
- Ольховский И. RS-протоколы.
- Уолрэнд Дж. Телекоммуникационные и компьютерные сети. Вводный курс. — М.: Постмаркет, 2001.
- Авдеев В. А., Гузик В. Ф. Компьютеры: шины, контроллеры, периферийные устройства: Учебное пособие. — М.: Радио и связь, 2001.
