





Ключевые слова: естественный постуральный баланс, стабилограф, центр давления
Многие функции оператор экзоскелета должен выполнять сам. В частности, поддержание равновесия. Все изученные нами образцы современных патентованных экзоскелетарных конструкций имеют общую особенность — правильным биомеханическим функционированием опорно-двигательной системы человека (например, способность сводов стопы гасить энергию удара, свободный перекат от пятки к носку, способность суставов стопы смещаться во всех плоскостях для сохранения заданной позы) пренебрегают в угоду упрощения, уменьшения количества узлов внешнего каркаса. Из-за этого долгая и продолжительная работа с использованием такого устройства невозможна в силу возникновения ощущения сильного дискомфорта у оператора.
Удобно ввести понятия состояния «естественного постурального баланса», при котором человек способен поддерживать тело в стабильном положении, и в котором все силы, действующие на тело, сбалансированы в состоянии покоя и «биомеханического функционирования»: т. е. обеспечения правильных движений, полноценного кровообращения, смягчение толчков и сотрясений.
Ставиться задача — анализа и разработки такой нижней конечности экзоскелетона, которая давала бы максимальную степень свободы оператору, не нарушая его естественного постурального баланса и биомеханического функционирования скелетно-мышечного аппарата.
Для успешного решения этой задачи необходимо проведение ряда экспериментов, с целью исследования влияния внешних конструкций на функционирование нижней конечности человека.
Ранее уже проводились исследования по тематике «Регуляция позы человека». В частности, в работе А. В. Терехова «Математическое моделирование регуляции позы человека» [1] выделяется частота, близкая к периодической составляющей, соответствующая «основным колебаниям», с частотой порядка 0.35 Гц. Так же, говорится о характерных основных колебаниях отклонения тела, составляющей доли градуса, что расценивается как порог чувствительности. Стороннее воздействие со стороны экзоскелета также может повлиять на порог чувствительности.
Предлагаемая программа испытаний состоит из 2 фаз:
1) Испытуемый встаёт на стабилограф «босой ногой» (в носке), далее стоит неподвижно в течение 2 минут. Испытуемый стоит с открытыми глазами, совершая лишь колебательные компенсаторные движения для поддержания вертикального положения, стоя обеими ногами на платформе. Все свои ощущения испытуемый должен чётко описывать исследователю (например: покалывание, отекание, чувство усталости). В это время стабилограф совершает запись движения проекции центра масс (Рис.1), а также развертку движения в двух плоскостях (пятка — носок, левая нога — правая нога) по времени. По истечении 2 минут эксперимент заканчивается, и испытуемый садится для восстановления.
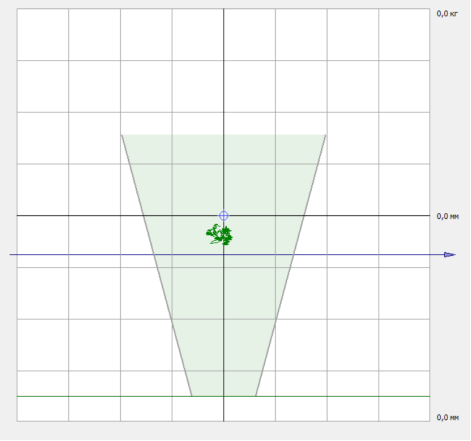
Рис. 1. Вид стабилограммы
Стоит отметить, что учитывается психологическая составляющая эксперимента. Высказывается предположение, что в начале проведения эксперимента испытуемый адаптируется к окружающей обстановке, а также, проявляется излишняя концентрация внимания на поддержании равновесия. Но, как показали натурные испытания, данное предположение не подтвердилось: не было зафиксировано хотя бы одного явного изменения измеряемого параметра (нагрузка на правую конечность, нагрузка на левую конечность, нагрузка на носки, нагрузка на пятки, среднеквадратическое отклонение центра давления (ЦД) в фронтальной плоскости, среднеквадратическое отклонение ЦД в сагиттальной плоскости, отношение среднеквадратических отклонений сагиттальной плоскости к фронтальной, максимальная амплитуда колебаний ЦД в фронтальной плоскости, максимальная амплитуда колебаний в ЦД сагиттальной плоскости, длина статокинезиограммы, длина статокинезиограммы в фронтальной плоскости, длина статокинезиограммы в сагиттальной плоскости, скорость ЦД в обеих плоскостях).
2) Испытуемый встаёт на стабилограф с зафиксированным голеностопным суставом. Фиксация осуществляется путём наложения лонгеты на верхнюю часть стопы и голень. Условия равносильны условиям из первой фазы, за исключением количества повторов: эксперимент повторяется 2 раза.
Таким образом, мы получаем данные, позволяющие сделать вывод о движении и колебаниях системы «оператор» и «оператор-экзоскелет».
В исследовании приняли участие молодые люди от 18 до 21 года, полностью здоровые, примерно одинаковой комплекции: ростом 180 см. и весом 80 кг.
Сравнительные результаты испытаний следующие:
1) Изменение развесовки в плоскости пятка-носок (сагитальная плоскость): давление на пятки возросло на 33 %.
2) Максимальная амплитуда колебаний ЦД в фронтальной плоскости упала на 34 %
3) Максимальная амплитуда колебаний ЦД в сагиттальной плоскости изменилась незначительно: примерно 1.5 %
4) Скорость ЦД во фронтальной плоскости упала на 40 %
5) Скорость ЦД в сагиттальной плоскости возросла на 11.5 %
Как видно из приведённых ниже примеров, развёрнутых стабилограмм (рис.2 и рис. 3), график колебаний ЦД с наложенной лангетой стал более плавным. Колебания в фронтальной плоскости совершаются с меньшей амплитудой. По показаниям прибора, человек с наложенной лангетой сохраняет более устойчивое положение.
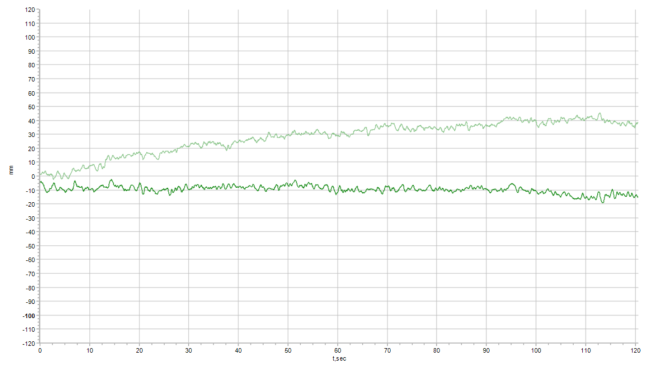
Рис. 2. Статокинезеограмма свободной ноги
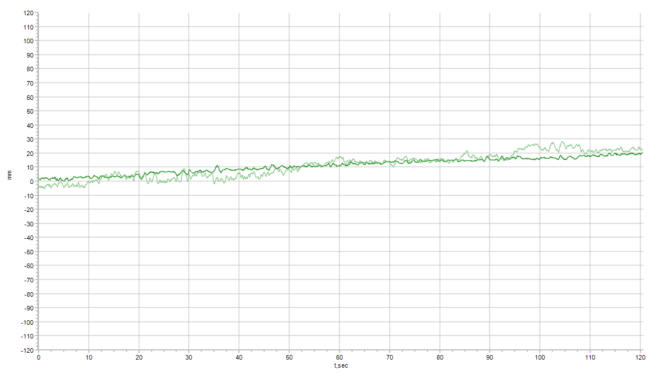
Рис. 3. Статокинезеограмма зажатой ноги
В то же время, испытуемыми был отмечен дискомфорт, выраженный сильным напряжением икроножной мышцы, а также неестественным напряжением остальных мышц ног.
Высказывается теория, что при наложении дополнительных фиксаторов на голеностопный сустав происходит перераспределение нагрузки на другие мышцы. Для решения этой задачи недостаточно использование одного стабилографа.
Фактически данные представляют интерес как с медицинской точки зрения, позволяя понять поведение прямостоящего человека с «отнятыми» фалангами пальцев и голеностопа, так и с технической, позволяя сделать вывод о влиянии сторонних механизмов на человека.
Литература:
- Терехов А. В. Математическое моделирование регуляции позы человека: дис.... канд. физ.-мат. наук: 01.02.01 Москва, 2007 147 с. РГБ ОД, 61:07–1/729
