





Поскольку пассажирский лифт предназначен для транспортировки людей по этажам высотных жилых и административных зданий, соответственно к электроприводу будут предъявляться особые требования: двигатель должен иметь плавный пуск и плавное торможение; диапазон регулирования скорости не менее 10: 1; жесткие обратные связи по напряжению, скорости, току статора. Согласно основным требованиям, предъявляемым к электроприводу пассажирского лифта, выбираем частотно-регулируемый асинхронный электропривод с соответствующими обратными связями. Разрабатываемая его функциональная схема представлена на рис.1.
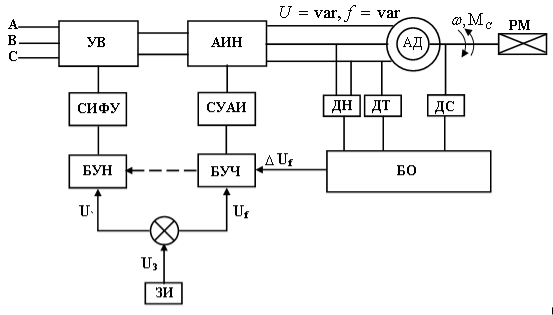
Рис. 1. Функциональная схема автоматизированного частотно-регулируемого асинхронного электропривода пассажирского лифта
На рис. 1 приняты следующие условные обозначения: УВ — управляемый выпрямитель; АИН — автономный инвертор напряжения; АД — асинхронный двигатель; РМ — рабочий механизм — кабина лифта; СИФУ — система импульсно-фазового управления; СУАИ — система управлении автономным инвертором; ДН — датчик напряжения; ДС — датчик скорости; ДТ — датчик тока статора; БУН — блок управления напряжением; БУЧ — блок управления частотой; БО — блок оптимизации; ЗИ — задатчик интенсивности; U` — сигнал управления напряжением; Uf — сигнал управления частотой; UЗ— сигнал задания; ![]() Uf— корректирующее значение частоты.
Uf— корректирующее значение частоты.
Автоматизированный частотно-регулируемый асинхронный электропривод работает следующим образом. Пуск асинхронного двигателя осуществляется регулированием частоты от нуля до номинального значения заданием сигнала управления, получаемого от задатчика интенсивности ЗИ c контролем скорости от датчика скорости ДС с блока оптимизации БО. Напряжение, соответствующее частоте, вычисляется в блоке БУН по экономичному закону частотного управления, то есть ![]() (где
(где  относительное изменение напряжения статорной обмотки,
относительное изменение напряжения статорной обмотки,  относительное изменение частоты тока статорной обмотки). Когда двигатель достигает номинального значения скорости, начинают действовать датчики ДТ и ДН, а также датчик ДС. В соответствии нагрузки на валу двигателя и скорости, то есть частоты, в БО формируется напряжение по выражению
относительное изменение частоты тока статорной обмотки). Когда двигатель достигает номинального значения скорости, начинают действовать датчики ДТ и ДН, а также датчик ДС. В соответствии нагрузки на валу двигателя и скорости, то есть частоты, в БО формируется напряжение по выражению ![]() , и соответственно определяются значения напряжения в блоке БУН.
, и соответственно определяются значения напряжения в блоке БУН.
Основу автоматизированного частотно-регулируемого асинхронного электропривода составляет тиристорный преобразователь постоянного тока серии VFD-VL для преобразователей частоты (компания DELTA ELECTRONICS), предназначенный для использования в лифтах и подъемных механизмах.
Кроме того, современные лифты обладают высокой грузоподъемностью, т. е. сильно меняется масса лифта, что меняет нагрузку на приводном электродвигателе в большом диапазоне. При этом скорость движения и ускорение лифта при разгоне/торможении должны оставаться постоянными величинами, не реагируя на значительные изменения нагрузки. Также нужно отметить необходимость экономии электроэнергии и сокращения объемов эксплуатационно-ремонтных работ.
Все вышеперечисленные проблемы решает применение в электроприводе лифта преобразователя частоты данного типа.
Особенностями преобразователей частоты серии VFD-VL являются:
- Высокоэффективный алгоритм векторного управления — управление ориентацией поля (FOC — field oriented control).
- Управление асинхронными и синхронными двигателями переменного тока, проведение автоматического тестирования двигателя при старте.
- Возможность питания от резервного источника питания
48/96 В постоянного тока.
- Наличие автоматической настройки и функции компенсации пускового момента.
- Встроенное управление процессом пуска и остановки лифта.
- Встроенная настройка работы выходного тормозного реле для управления внешним электромагнитным тормозом.
- Поддержка управления от внешнего цифрового пульта.
- Автоматическая настройка статических и динамических параметров двигателя.
- Встроенный тормозной ключ для всех типономиналов данной серии (для внешних тормозных резисторов).
- Возможность работы с энкодерами, имеющими выход Line Drive, а также Sin, Cos.
- Встроенный порт RS485 с поддержкой стандартного протокола Modbus.
- Программное обеспечение для компьютера, обеспечивающее мониторинг, управление, загрузку и сохранение параметров.
- Полный комплекс защитных функций. Высокоточное измерение тока, многоуровневая защита от перегрузки (oL, oL1, oL2), от перенапряжения и сверхтока, от короткого замыкания, функция поиска скорости, подключение датчика перегрева двигателя и еще ряд других функций.
Помимо кардинального улучшения потребительских качеств лифтов, применение частотных преобразователей позволяет сократить потребление электроэнергии в среднем на 50%, а также за счет плавности разгонов и остановок продлить срок службы основных узлов привода (электродвигатель, редуктор, шкив, тормоз) с 5–10 до 25 лет. Монтажная схема частотно-регулируемого асинхронного электропривода представлена на рис. 2.
Современные пассажирские лифты выполняются противовесом. Противовес для лифтов выбирается с таким расчетом, чтобы он уравновешивал вес кабины и часть номинального поднимающего груза.
В лифте установлен асинхронный двигатель из единой серии 5А со следующими номинальными данными: тип асинхронного двигателя 5А (Ф)225L6, номинальная мощность PH = 17,5 кВт, номинальная скорость nH = 940 об/мин; номинальное напряжение UH = 380 В; номинальный ток статора I1H = 36,1 А; максимальная перегрузочная способность по моменту Mmax =2,2–2,7; кратность пускового тока Iпуск = 6,5; отношение максимального тормозного момента к номинальному — ![]() = 2,2–2,7; допустимое число включения в час 90; номинальный КПД
= 2,2–2,7; допустимое число включения в час 90; номинальный КПД ![]() 84,5 %; номинальный коэффициент мощности cos
84,5 %; номинальный коэффициент мощности cos ![]() = 0,87; масса 439 кг.
= 0,87; масса 439 кг.
По представленным номинальным данным асинхронного двигателя определим потребляемую полную мощность:
 .
.
Приведенный номинальный ток ротора ![]() .
.
Ток намагничивания магнитной системы асинхронных двигателей определяется по универсальной кривой намагничивания асинхронных машин.
Номинальный ток намагничивания асинхронного двигателя можно приблизительно определить по выражению
![]() .
.
Потребляемая активная мощность двигателя из сети
![]()
и потребляемая реактивная мощность двигателя из сети
![]() .
.
Определим номинальное значение скольжения
 ;
;
определим критическое значение скольжения
![]()
Определим значения номинального момента
определим значения максимального момента
![]()
определим значения пускового момента
определим значения пускового тока
![]() .
.
Рассчитанные номинальные механические параметры для основной скорости режима работы асинхронного двигателя данного типа нанесем в табл. 1.
Таблица 1
|
s |
1 |
0,06 |
0,03 |
0 |
|
|
0 |
98,4 |
101,6 |
104,7 |
|
|
2,4 |
1,0 |
2,6 |
0 |
|
M, Нм |
426,7 |
462,3 |
177,8 |
0 |
При частотном управлении асинхронным двигателем лифта будем использовать экономичный закон управления частоты
![]() ,(1)
,(1)
где  относительное изменение момента сопротивления на валу двигателя,
относительное изменение момента сопротивления на валу двигателя,  относительное изменение линейного напряжения статорной обмотки двигателя,
относительное изменение линейного напряжения статорной обмотки двигателя,  относительное изменение частоты напряжения статорной обмотки двигателя.
относительное изменение частоты напряжения статорной обмотки двигателя.
На основании полученных данных напряжения асинхронного двигателя лифта, построим график изменения напряжения в функции частоты (рис. 2 — характеристика).
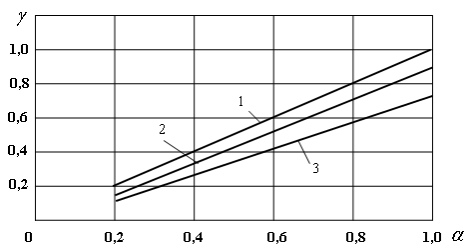
Рис. 2. График изменения напряжения в функции частоты при экономичном законе частотного управления асинхронного двигателя типа 5А (Ф)225L6 при различных значениях момента сопротивления: ![]()
Если асинхронный двигатель работает с нагрузкой, отличной номинальной, т. е. при моменте ![]() (МС — момент сопротивления на валу двигателя), то кратность максимального момента по отношению к этому значению момента сопротивления будет равна:
(МС — момент сопротивления на валу двигателя), то кратность максимального момента по отношению к этому значению момента сопротивления будет равна:
 (2)
(2)
Критическое скольжение будет изменяться обратно пропорционально частоте
 (3)
(3)
Формулу Клосса для частотно-регулируемого асинхронного двигателя с учетом выражений (4.14), (4.15) запишем в упрощенном виде:
 (4)
(4)
где sкр определено при номинальной частоте.
Для значений частоты ![]() рассчитываем механические характеристики асинхронного двигателя лифта по (8) для номинального режима
рассчитываем механические характеристики асинхронного двигателя лифта по (8) для номинального режима ![]() и построим механическую характеристику (рис. 3).
и построим механическую характеристику (рис. 3).
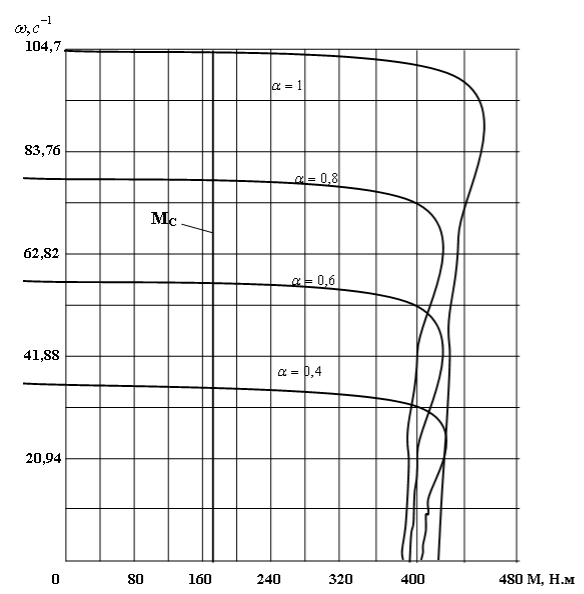
Рис. 3. Механическая характеристика частотно-регулируемого асинхронного двигателя типа 5А (Ф)225L6 и момент сопротивления лифта для номинального режима нагрузки ![]()
Для значений частоты
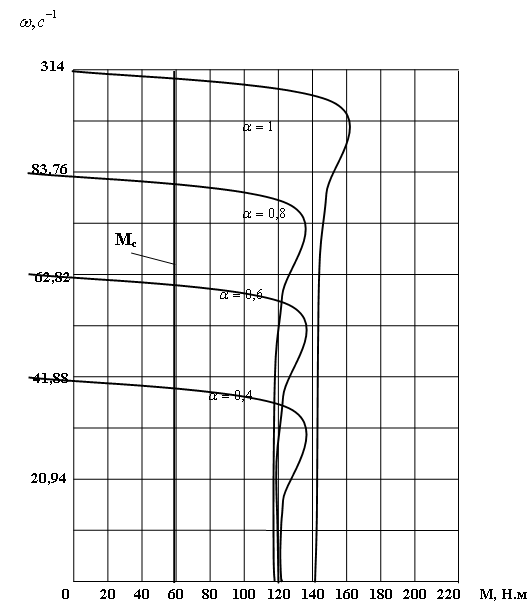
Рис. 4. Механическая характеристика частотно-регулируемого асинхронного двигателя типа 5А (Ф)225L6 и момент сопротивления лифта для номинального режима нагрузки ![]()
Таким образом, использованиеэкономичного закона частотного управления асинхронным электроприводом пассажирского лифта позволяет значительно экономить электроэнергию пассажирского лифта, и это представляет примерно 25–30%.
Литература:
- Imomnazarov A. T. Neft va gaz konlarining elektr jihozlari. О`quv qo`llanma. — Toshkent: «CHO`LPON», 2007. — 145 b.
- Блантер, С. Б.; Суд, И. И. Электрооборудование нефтяной и газовой промышленности. — М.: Недра, 1990.
- Hoshimov O. O., Imomnazarov A. T. Ekektr mexanik tizimlarda energiya tejamkorlik. 2- nashr. Дarslik. — Тoshkent: Fan va texnologiya, 2015. — 155 b.
- Имомназаров, А. Т.; Аъзамова, Г. А. Асинхрон моторларнинг энергия тежамкор иш режимлари. Монография. — Тошкент: ТошДТУ, 2014. — 140 б.
