





Первым этапом была разработана модель станка с уже определенными элементами механики. Этот шаг дал уже точно понять какие размеры будут у станка, где можно купить направляющие, подшипники и так далее.
На рис. 1 представлена функциональная модель сборки станка. Стенки, дно и крышка будут выполнены из акрилового стекла, возможно изготовление в различной цветовой гамме. Добавление кнопок и usb разъема на корпус станка ещё не решено, так как ещё нет полной уверенности, на какой плате будет базироваться данный станок.
Также представляю чертеж с габаритными размерами станка (рис. 1).
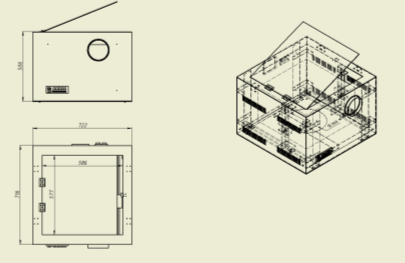
Рис. 1. Габаритные размеры
Из рисунков видно, что корпус станка будет неразъемный, заготовка будет помещаться через верхнюю крышку, которая будет раскрываться на 180 градусов.
Основной проблемой разработки данного станка была разработка программного обеспечения, которое позволит без особой сложности генерировать управляющий код. Сложность заключалась в том, что обычная генерация кода под 3d принтер или фрезерный станок не подходит. Поэтому было принято решение разработать собственную программу, которая будет являться узко направленной, специально для данного оборудования. Работать данная программа будет только с файлами STL формата ASCII. Данный формат один из самых распространённых, и присутствует во всех программах, которые позволяют проектировать 3d модели.
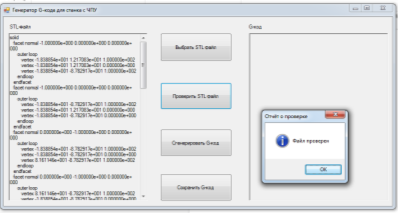
Рис. 2. Проверка STL
На рис. 2 представлена проверка STL файла, данное окошко показывает, что файл исправен и из него можно сгенерировать код.
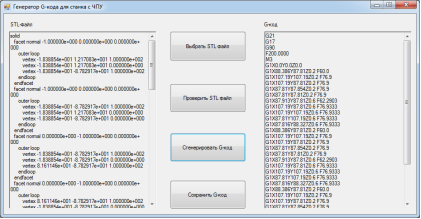
Рис. 3. Генерация g-code
На рис. 3 представлена генерация управляющего кода по stl модели. Пока модель в данной программе представлена в виде набора координат точек, располагается слева. Справа у нас выдается сам код, в котором у нас ось z служит как координата поворота.
После проверки модели и генерации кода нам остается нажать на кнопку сохранить код.
Литература:
- Аверьянов И. Н., Болотеин А. Н., Прокофьев М. А., Проектирование и расчет станочных и контрольно-измерительных приспособлений / И. Н. Аверьянов, А. Н. Болотеин, М. А. Прокофьев // Рыбинск: — РГАТА 2010–220 с.
- Гурин В. В., Замятин В. М., Попов А. М., Детали машин и основы конструирования / В. В. Гурин, В. М. Замятин, А. М. Попов. // Томск: — ТПТУ, 2010–427 с.
- Пупков К. А., Егупов Н. Д. Методы классической и современной теории автоматического управления. Учебник в 5-и тт.; 2-е изд., перераб. и доп. / Под ред. К. А. Пупкова, Н. Д. Егупова. — М.: Издательство МГТУ им. Н. Э. Баумана, 2004. — 656 с
