





Построена математическая модель типовой гидравлической системы, Построение и исследование программных моделей выполнено с использованием Matlab/ Simulink r2015b и его расширения — SimScape/SimHydraulics. Разработан графический интерфейс в Matlab для проведения экспериментов с моделью. Получены результаты экспериментов, не противоречащие известным законам физики.
Ключевые слова: гидравлическая система, моделирование, движение жидкости
Введение
Создание нового технического объекта — сложный и длительный процесс, в котором стадия проектирования имеет решающее значение в осуществлении замысла и достижении высокого технического уровня. Моделирование является одним из важнейших этапов проектирования любого технического объекта, в том числе и современных гидравлических систем, позволяя заменить или значительно сократить этапы наладки и натурных испытаний [1]. Роль моделирования особенно высока, когда натурные испытания слишком дороги или опасны, как, например, при работе с космическими аппаратами, химическими и ядерными реакторами и другими объектами [2].
Моделирование гидросистемы может быть выполнено в двух режимах [3]:
- В стационарном режиме движения жидкости.
- В нестационарном, то есть динамическом режиме движения жидкости.
Стационарный режим — это режим, при котором система находится в состоянии покоя вследствие того, что все внешние воздействия и параметры самой системы не меняются во времени.
Динамический стационарный режим — это режим, возникающий тогда, когда приложенные к системе внешние воздействия изменяются по какому-либо установившемуся закону, в результате чего система приходит в режим установившегося вынужденного движения.
Развитие гидравлической техники создало условия для нового качественного скачка в функциональных возможностях технических систем, связанных с движением механических устройств, что привело к возникновению новой науки — гидравлики [4].
Гидравлика — прикладная наука о равновесии и движении жидкостей и о способах их практического применения.
1. Характеристика гидравлических систем
К гидравлическим системам относятся технологические схемы трубопроводов, для которых принимаются следующие допущения [5]:
‒ во всех трубах протекает однофазный поток жидкости,
‒ температура жидкости одинакова на всех участках;
‒ все трубы располагаются на одном уровне,
‒ в системе нет обратных потоков (рециклов),
‒ не учитываются местные сопротивления и перепады давлений в трубах,
‒ рассматриваются, короткие трубопроводы;
‒ системы включают только: клапаны (вентили) с постоянными неизменяющимися коэффициентами пропускной способности; закрытые емкости (аккумуляторы), давление газа в которых подчиняется идеальным законам.
2 Среда Matlab
Программа Simulink [6] является приложением к пакету Matlab [7] и тесно связана с ним. Simulink — самостоятельный инструментом Matlab и при работе с ним не требуется знание самого Matlab и остальных его приложений. С другой стороны, доступ к функциям Matlab и другим его инструментам остается открытым и их можно использовать в Simulink [8]. Часть входящих в состав пакетов имеет инструменты, встраиваемые в Simulink (например, LTI-Viewer приложения Control System Toolbox — пакета для разработки систем управления). Имеются также дополнительные библиотеки блоков для разных областей применения (например, Power System Blockset — моделирование электротехнических устройств, Digital Signal Processing Blockset — набор блоков для разработки цифровых устройств и т.д).
2.1 SimHydraulics вSimulink
Simulink включает много проблемно-ориентированных библиотек, таких как SimHydraulics, SimMechanics и пр., с помощью которых можно создать модель и провести моделирование.
Для моделирования гидравлического привода можно использовать SimHydraulics — набор моделирования для инженерного проектирования и имитации гидравлических систем в Simulink и Matlab. Он содержит полную библиотеку гидравлических блоков, которая является расширением Simscape-библиотек базовых гидравлических, электрических и механических вспомогательных блоков. SimHydraulics выполняет анализ переходных процессов в гидромеханических системах. Можно использовать блоки высокоуровневых библиотек или сконструировать приводы, не входящие в эти библиотеки. SimHydraulics разработан специально, чтобы охватить сценарии моделирования с гидравлическими приводами, являющимися частью системы управления. Он также подходит для систем, которые допускают сосредоточенные параметры.
К достоинствам моделирования гидравлических систем при помощи SimHydraulics в Simulink могут быть отнесены простота создания моделей, наглядность и высокая скорость вычислений при моделировании систем с большим числом элементов.
В отличие от большинства других блоков Simulink, которые выполняют математические действия или обрабатывают сигналы, блоки SimHydraulics представляют собой непосредственно элементы гидросистем или связи между ними. При этом набор стандартных блоков достаточно широк и позволяет моделировать практически любые гидравлические системы.
В современном машиностроении используются гидросистемы двух типов:
- гидросистемы для подачи жидкости;
- гидравлические приводы.
Для гидросистем, обеспечивающих подачу жидкости к потребителям, характерно отсутствие в них устройств, преобразующих энергию движения жидкости в механическую работу. К этим системам относятся: системы жидкостного охлаждения, системы пожаротушения, системы подачи топлива, смазки и другие. Такие гидросистемы, как правило, принадлежат к классу разомкнутых гидросистем, в которых движение жидкости обеспечивается за счет работы насоса.
Гидравлическим приводом называется совокупность устройств, предназначенная для передачи механической энергии и (или) преобразования движения посредством рабочей жидкости. Такие гидросистемы обычно относятся к классу замкнутых гидросистем.
В литературе также встречается термин «гидропередача», под которым понимается силовая часть гидропривода, включающая насос, гидродвигатель и соединительные трубопроводы с рабочей жидкостью.
Как правило, даже самый простейший гидравлический привод включает в себя:
‒ гидробак для хранения и охлаждения рабочей жидкости;
‒ насос для подачи рабочей жидкости из бака и создания давления в системе;
‒ различные клапаны (предохранительные, переливные, редукционные, обратные, гидрозамки и другие);
‒ исполнительный механизм (гидродвигатель, поворотный гидродвигатель или гидромотор);
‒ фильтр для очистки рабочей жидкости от твердых частиц;
‒ гидролинии, соединяющие элементы гидросистемы между собой.
Функции гидроприводов непрерывно расширяются, повышаются требования к их рабочим характеристикам, а следовательно, усложняются и конструкции, что вызывает увеличение сроков проектирования, экспериментальных исследований и доводочных испытаний.
2.2 Пример моделирования гидравлических систем вMatlab
Рассмотрим примеры моделирования гидравлической системы в Matlab в стационарном режиме и динамическом.
На рисунке 1 представлена схема моделируемой гидросистемы с двумя закрытыми ёмкостями. Модель в Matlab включает 11 переменных для стационарного и динамического движения жидкости на основании входных данных. Для каждой из 11 переменных можно построить график изменения для заданного диапазона изменения и входных параметров.
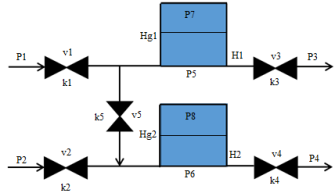
Рис. 1. Схема гидравлической системы с двумя закрытыми емкостями
Математическая модель гидросистемы
Система в стационарном режиме может быть описана следующим образом. Скорости потоков жидкости определяются состояниями клапанов как [9]:
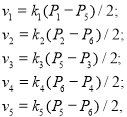
где k1-k5 — коэффициенты пропускной способности клапанов, P1-P4 — давления жидкости на входе в систему и на выходе из нее соответственно, P5-P8 — давления жидкости в емкостях, v1-v5 — расходы жидкости через клапаны.
Уравнения баланса принимают следующий вид:
![]() ;
;
![]() .
.
Давления жидкости и газа в закрытых ёмкостях представляются как:
![]()
![]() ;
;
![]()
![]() ,
,
где ρ — плотность жидкости,
Нестационарный режим моделируется обыкновенными дифференциальными уравнениями [10]:
![]() ;
;
![]() ,
,
где ![]() — объемы жидкости в верхней и нижней емкостях.
— объемы жидкости в верхней и нижней емкостях.
Стационарный режим движения жидкости может быть рассчитан в разработанном редакторе модели. На рисунке 2 изображено главное окно редактора, в котором могут быть заданы все параметры гидросистемы, а на рисунке 3 представлены средства построения графиков по результатам моделирования. На рисунке 4 показаны результаты расчёта стационарного режима — зависимость уровня жидкости во второй ёмкости от плотности жидкости.
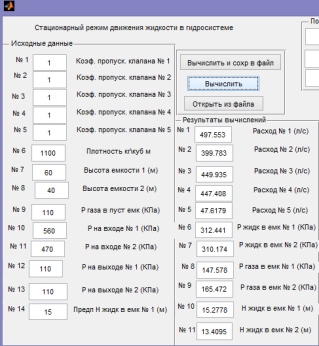
Рис.2. Главное окно редактора модели
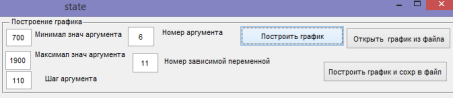
Рис.3. Построение графика в редакторе модели
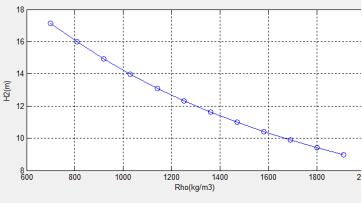
Рис. 4. Зависимости уровня жидкости во второй емкости от плотности жидкости
Для расчёта нестационарного режима используется интерфейс аналогичный изображённому на рисунке 2.
2.3 Моделирование вSimulink
Построенная модель гидравлического привода в пакете Simulink с помощью SimScape представлена на рисунке 5. Результат эксперимента представлен на рисунке 6.
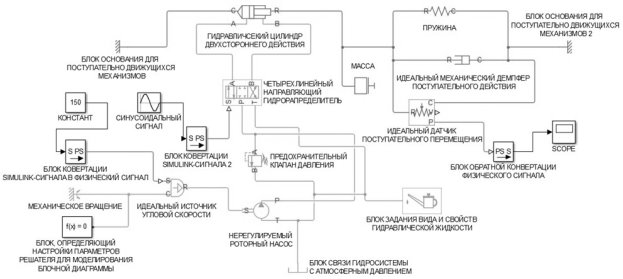
Рис.5. Модель гидравлического привода в SimScape
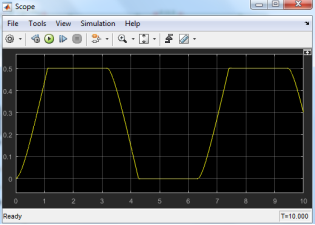
Рис. 6. Результат моделирования гидравлического привода
На рисунке 7 изображена модель гидросистемы с рисунка 1, выполненная с применением типовых звеньев теории автоматического управления в Simulink [11]. На рисунке 8 представлен результат моделирования системы — возрастающий уровень жидкости в ёмкости с течением времени.
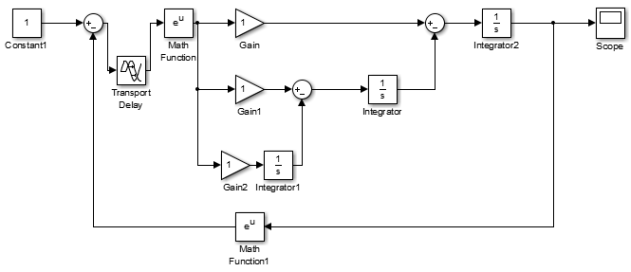
Рис. 7. Модель гидросистемы с рисунка 1 в Simulink
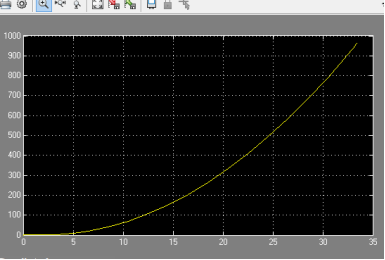
Рис. 8. Результат моделирования гидросистемы в Simulink
Заключение
Рассмотрена типовая гидросистема с двумя закрытыми ёмкостями и гидропривод. Разработана программная графическая модель гидравлического привода и проведён вычислительный эксперимент в SimScape. Построена модель гидравлической системы в Simulink, получены результаты эксперимента, не противоречащие теоретическим ожиданиям. В Matlab создан графический интерфейс, в котором можно проводить эксперименты с моделью гидросистемы в стационарном и динамическом режиме движения жидкости.
Литература:
- Воронин А. В. Моделирование мехатронных систем. Учебное пособие. Издательство Томского политехнического университета. 2008–137 с.
- Оборудование водопроводно-канализационных сооружений / Под ред. Москвитина А. С. — М.: Стройиздат, 1979.
- Кроу К. и др. Математическое моделирование химических прозводств. — М.: Мир, 1973.
- Абрамов Н. Н. Водоснабжение. — 3-е изд., перераб. и доп. — М.: Стройиздат, 1982.
- Кафаров В. В., Мешалкин В. М. Принципы математического моделирования химико-технологических систем. — М.: Химия, 1974.
- Дьяконов В. П. Simulink 4. — М.: Солон-ПРЕСС, 2004.
- Дьяконов В. П. MatLab 6/6.1/6.5 + Simulink 4/5. Основы применения. –М.: Солон-ПРЕСС, 2004.
- Герман-Галкин С. Г. Matlab и Simulink. Проектирование мехатронных систем на ПК. Санкт-Петербург. КОРОНА-Век. 2008.
- Шевелёв Ф. А., Шевелёв А. Ф. Таблицы для гидравлического расчёта водопроводных труб: Справ. пособие. — 6-е изд., доп. и перераб. — М.: Стройиздат, 1984.
- Проектирование водозаборных сооружений из поверхностных источников / Сост.: Быкова П. Г., Гальперин Е. М., Осипова Т. В.; Самарск. гос. арх.-строит. акад. Самара, 1999.
- Воронов А. А. Основы теории автоматического регулирования и управления. Учебное пособие для вузов Москва, «Высшая школа», 1977–519с.
