





Программирование изменения скважности импульсов ШИМ на микроконтроллере STM32 с помощью кнопки
Емельянов Александр Александрович, доцент;
Бесклеткин Виктор Викторович, ассистент;
Иванин Александр Юрьевич, студент;
Пестеров Дмитрий Ильич, студент.
Российский государственный профессионально-педагогический университет
(г. Екатеринбург)
Целью данной работы является программирование студентами на лабораторном стенде изменения скважности импульсов ШИМ с помощью кнопки. Программирование осуществляется в среде CooCox CoIDE.
Для реализации этой цели необходимо решить следующие задачи:
‒ Ввод значений для кнопки в положении «ON» и в положении «OFF»;
‒ Ввод структур для использования портов ввода-вывода и таймера;
‒ Включение тактирования периферийных устройств;
‒ Ввод функции инициализации:
а) Назначение портов ввода-вывода (GPIO – General Ports Input/Outputs);
б) Инициализация таймера (TIM4);
в) Инициализация ШИМ;
‒ Описание поведения ШИМ при нажатой кнопке с помощью структуры «if…else».
Порты ввода-вывода (GPIO) - это основной элемент любого микроконтроллера. Они используются для «общения» микроконтроллера с внешним миром. Устройство портов ввода-вывода представлено на рис. 1.
Как видно из рис. 1, выводы микроконтроллера можно сконфигурировать как на вход, так и на выход:
- Входной драйвер (Input driver) – позволяет сконфигурировать порт микроконтроллера как вход (аналоговый вход, альтернативная функция) с возможностью чтения входных данных и включает в себя:
а) Триггер Шмитта (TTL Schmitt trigger);
б) Стягивающий резистор (Pull-down) – подключен к выводу G (земля), позволяет получить на выводе низкое напряжение (логический ноль);
в) Подтягивающий резистор (Pull-up) – подключен к питанию микроконтроллера, позволяет получить на выводе высокое напряжение (логическую единицу);
г) Защитный диод (Protection diode) – защищает микроконтроллер от перенапряжения.
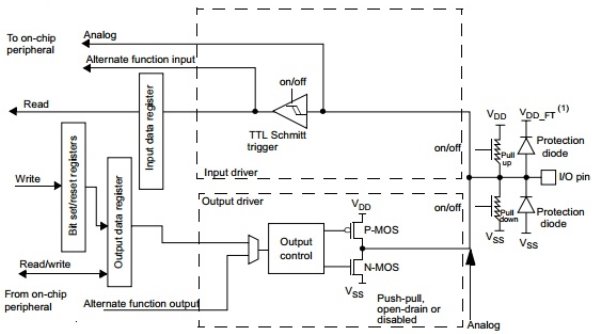
Рис. 1. Устройство портов ввода-вывода (GPIO)
- Выходной драйвер (Output driver) – позволяет сконфигурировать порт микроконтроллера как выход с возможностью чтения и записи выходных данных. Кроме того, возможна конфигурация порта в виде выхода альтернативной функции (например, для генерации ШИМ-сигналов). Выходной драйвер включает в себя:
а) Управление выходом (Output control);
б) Транзисторы (PMOS и NMOS) - используются для определения на выходе микроконтроллера высокого напряжения (логической единицы), либо низкого напряжения (логического нуля);
в) Защитный диод (Protection diode) – защищает микроконтроллер от перенапряжения.
В данной работе для изменения скважности импульсов ШИМ необходимо подключить кнопку. Кнопка – это устройство, при нажатии на которое происходит замыкание контактов. Для подключения кнопки к микроконтроллеру необходимо сконфигурировать порт микроконтроллера как вход и включить чтение входных данных.
Алгоритм набора кода в программе CoIDE состоит в следующем:
- Запускаем среду программирования CooCox CoIDE.
- После запуска CooCox CoIDE в строке меню нажать: Project → New Project.
- В появившемся окне в поле «Project name» ввести имя своему проекту.
- Далее нужно выбрать поле с надписью «Chip».
- Появится окно с выпадающими списками различных фирм микроконтроллеров (рис. 2). Необходимо открыть список ST, затем из выпадающего списка открыть подсписок STM32F103x, после чего найти микроконтроллер STM32F103C8, выбрать его левым щелчком мыши и нажать Finish (рис. 3).
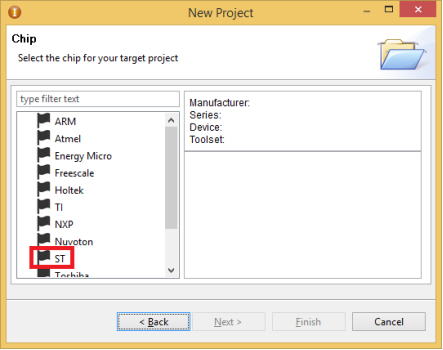
Рис. 2. Выбор фирмы микроконтроллера
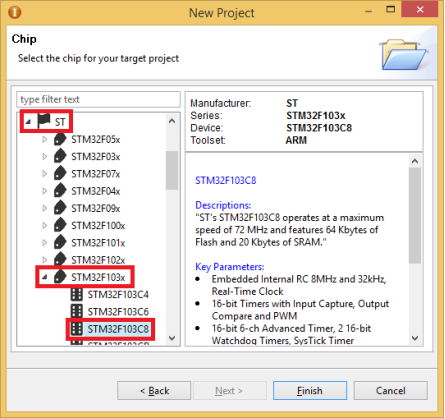
Рис. 3. Выбор микроконтроллера
- После проделанных действий появится главное окно с репозиторием для выбора необходимых для проекта библиотек (рис. 4). Необходимо подключить следующие библиотеки:
а) RCC – для управления тактовым генератором;
б) GPIO – для управления портами ввода-вывода;
в) TIM – для управления таймерами.
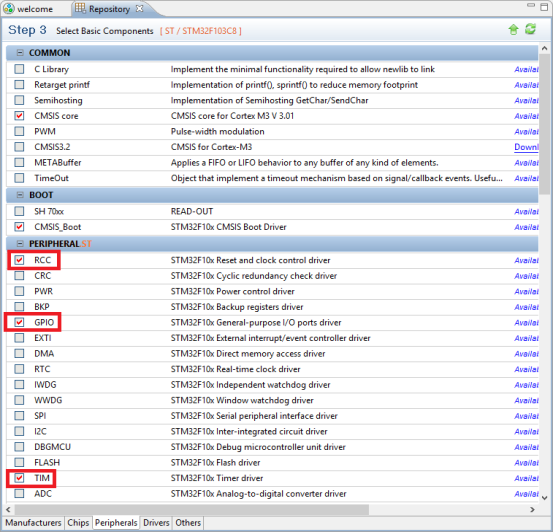
Рис. 4. Выбор библиотек в репозитории
- После выбора необходимых библиотек в панели файлов нужно выбрать файл «main.c», весь код будет находится здесь.
- С помощью директивы «#include <>» необходимо подключить заголовочные файлы (рис. 5).
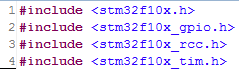
Рис. 5. Подключение заголовочных файлов
- После подключения заголовочных файлов необходимо с помощью директивы «#define» ввести значения для положения кнопки «ON» - нажата и «OFF» - не нажата (рис. 6).
![]()
Рис. 6. Ввод значения для положений кнопки
- Необходимо включить тактирование периферийных устройств. Для этого нужно создать и заполнить функцию «InitRCC()» (рис. 7).

Рис. 7. Функция включения тактирования периферийных устройств
- Следующим шагом будет создание и заполнение функции инициализации периферийных устройств «InitAll()»:
а) Необходимо ввести структуры для инициализации портов ввода-вывода (GPIO) и таймера (рис. 8);
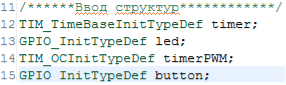
Рис. 8. Ввод структур
б) Провести инициализацию и настройку портов ввода-вывода (рис. 9);
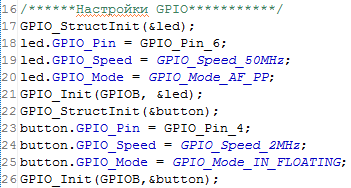
Рис. 9. Инициализация GPIO
в) Инициализация и настройка таймера TIM4 (рис. 10);
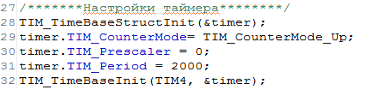
Рис. 10. Инициализация таймера (TIM4)
г) Инициализация и настройка ШИМ (рис. 11);
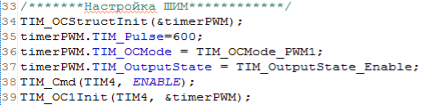
Рис. 11. Настройка ШИМ
- После того как функции «InitRCC()» и «InitAll()» были введены, необходимо объявить их перед функцией «main()» (рис. 12).
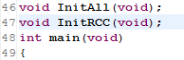
Рис. 12. Объявление функций
- Следующим шагом необходимо записать функци «InitRCC()» и «InitAll()» между фигурными скобками в функцию «main()», а также в цикле «while(1)» с помощью структуры «if…else» задать параметры для кнопки и регистров сравнения таймера TIM4 (рис. 13). После проделанных действий код можно считать завершенным.
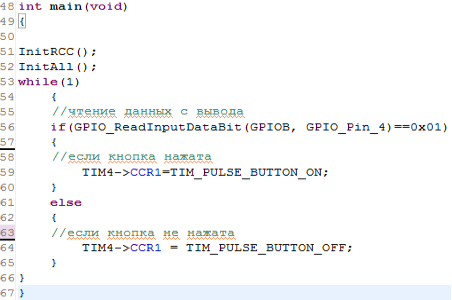
Рис. 13. Заполнение функции «main()»
- После написания кода программы, его необходимо скомпилировать. Для этого в панели инструментов нужно нажать «Build». В случае успешной компиляции в консоли появится надпись «BUILD SUCCESSFUL», а также будет указан размер программы. Если же в коде присутствуют ошибки, то в консоли будет указано, где именно находятся эти ошибки, а также появится надпись «BUILD FAILED».
- После завершения компиляции последним этапом станет загрузка рабочей программы в микроконтроллер. Для этого нужно через специальный кабель (удлинитель USB) подключить программатор, расположенный на лабораторном стенде, к компьютеру. После подключения в панели инструментов нажать «Download Code to Flash» и дождаться окончания загрузки. В случае удачной загрузки в консоли появятся надписи: «Erase: Done»; «Program: Done»; «Verify: Done». Если существуют проблемы с подключением платы к компьютеру, то появится надпись «Error: Connect failed, check config and cable connection». Необходимо проверить кабель, к которому подключено устройство.
Результаты изменения скважности импульсов ШИМ с помощью кнопки даны на рис. 14.
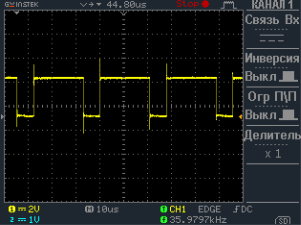
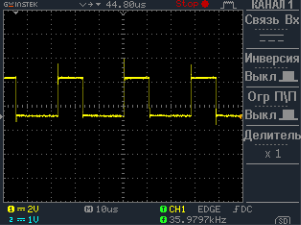
Рис. 14. Осциллограммы изменения скважности импульсов ШИМ с помощью кнопки
Литература:
- Анучин А. С. Системы управления электроприводов: учебник для вузов / А. С. Анучин. – М.: Изд. дом МЭИ, 2015. – 373 с.
- Огородников И. Н. Микропроцессорная техника: введение в Cortex-M3: учеб. пособие / И. Н. Огородников. – Екатеринбург: изд-во Урал. Ун-та, 2015. – 116 с.
- Джозеф Ю. Ядро Cortex-M3 компании ARM. Полное руководство / Ю. Джозеф; пер. с англ. А. В. Евстифеева. – М.: Додэка-XXI, 2012. – 552 с.
- ST Microelectronics. RM0008 Reference manual. STM32F101xx, STM32F102xx, STM32F103xx, STM32F105xx and STM32F107xx advanced ARM-based 32-bit MCUs. Rev 16 - 2015.
