





В статье описана возможность повышения скорости вывешивания и горизонтирования платформы и упрощения работы оператора, при использовании лазера нивелира соединённого интерфейсом с системой «СКАУТ» и системой «СКИФ».
Ключевые слова: вывешивание, горизонтирование, лазер, нивелир
Possibility of increase of speed of hanging out and leveling of platform and simplification of work of operator is described in the article, at the use of laser of level connected by an interface with the system SKIF and SCOUT
Keywords:hanging out, leveling, laser, level
В настоящее время при строительстве зданий, а также конструкций больших размеров, при использовании специальной техники (краны, подъёмники, буровые установки и т.д.) происходит большое количество аварий.
По данным Департамента мониторинга Национального объединения строителей, который подвел итоговое количество аварий и происшествий на стройках зданий и крупных сооружения за последние годы, цифры удручающие — число погибших возросло по сравнению с 2014 — 2016 годом в два раза, количество аварий — в полтора. Одной из причин аварий является опрокидывание платформы с грузом. В связи с этим предлагается система, состоящая из устройств контроля вертикального и горизонтального расположения связанная с системой ГЛОНАСС (СКАУТ). Задачей горизонтирования подвижной установки является обеспечение нулевых (или близких к ним) отклонений горизонтируемой плоскости подвижной установки по тангажу (в продольном направлении) и крену (в поперечном направлении). В связи с этим предлагается альтернативная система вывешивания и горизонтирования платформы с применением лазерной технологии, позволяющая производить постоянный мониторинг устойчивости при использовании специальной техники. Так же данная система обладает способностью подавать сигнал опасности и задействовать механизмы для предотвращения опрокидывания.
Лазер нивелир необходим там, где рабочий процесс требует точного задания осей и плоскостей на местности, что обеспечивает система ГЛОНАСС (СКАУТ), в виду того, что лазер нивелир работает в автоматизированном процессе горизонтирования и осуществлять контроль за этим процессом, но лазерное нивелирование возможно и в полуавтоматическом режиме, что позволяет в ручном режиме изменять горизонтальную и вертикальную плоскости. В данной работе предлагается возможное использование лазера нивелира различного исполнения ручного и стационарного, в зависимости от постановки задачи, при работе служб М.Ч.С. и техники специального назначения. [1] Установка лазера нивелира на мобильные или стационарные краны, позволит не только осуществлять постоянный контроль за горизонтальной и вертикальной плоскостями крана, но и получать информацию о возможном изменении данных, при этом в случае потери контроля или же возникновения критических ситуаций (сигнал СОС), оповещать о них вышестоящее руководство (рис. 1) [1, 2].
Схема горизонтального позиционирования.
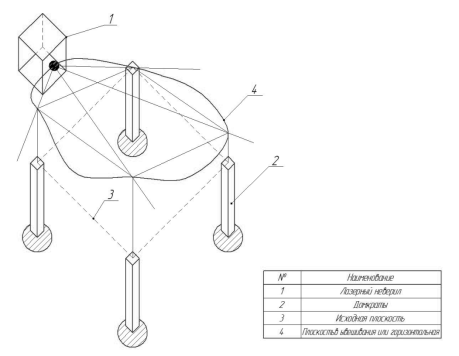
Рис. 1.
Сигнал лазера нивелира, подаётся на приводы гидровинтовых или же пневмодомкратов и моделирует горизонтальную плоскость и осуществляет постоянный контроль. Предложенная система позволяет обеспечивать быстроту вывешивания, а также обеспечивать постоянный контроль горизонтирования плоскости [3].
Принцип работы системы СКАУТ.
Пользователи видят данные спутникового контроля в программе «СКАУТ-Платформа». Здесь представлена информация о текущем положении, история перемещений с указанием на карте, аналитические отчеты в виде графиков и таблиц. Все это доступно на ПК, планшетах и мобильных устройствах. А чтобы постоянно быть в курсе происходящего на площадке, где находится рабочее специальное оборудование, над которым ведется контроль вертикального и горизонтального позиционирования [5].
Все данные об объекте выводятся на монитор ноутбука или планшета и дублируются на контрольном диспетчерском пункте. В случае отклонения от заданных плоскостей звучит сигнал СОС что даёт возможность оперативно решить задачу по устранению данного происшествия.
Программа СКИФ
«Скиф-навигатор» Pro позволяет:
Главное меню (рис. 2).
– Контролировать перемещение автомобилей в режиме реального времени;
– Формировать отчеты и графики;
– Экспортировать отчеты в форматы PDF, xlsx, html;
– Формировать путевые листы;
– Отправлять отчеты по электронной почте и на FTP сервер по заданному графику [4, 6] (рис. 2);
– Отправлять сообщения по СМС, e-mail при отклонении от заранее настроенных параметров контроля;
– Создавать, редактировать на карте геозоны различной формы, контрольные точки прохождения маршрута и получать информацию о посещении определенной геозоны или о отклонении от маршрута;
– Просматривать маршрут следования автомобиля за определенный промежуток времени.
– Осуществлять ретрансляцию данных на другие сервера;
– Осуществлять доступ к системе со смартфонов iOS и Android при помощи мобильного приложения [6] (рис. 3);
Вид программы СКИФ.
Главное меню
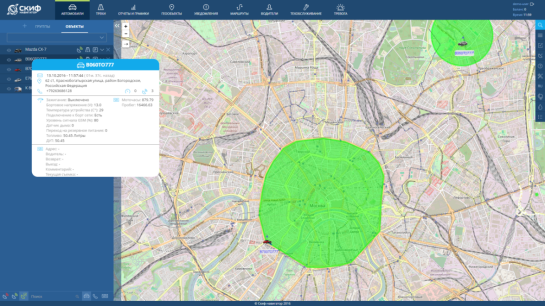
Рис. 2. Главное меню
Основные настройки
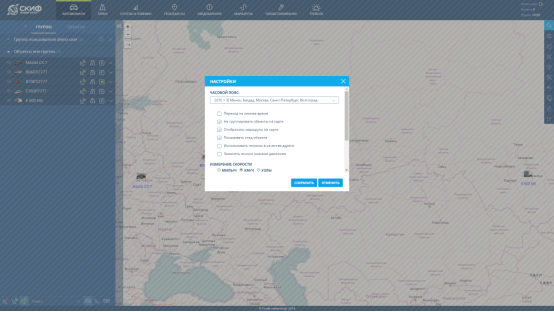
Рис. 3. Основные настройки
– Контролировать перемещение автомобилей в режиме реального времени;
– Формировать отчеты и графики;
– Экспортировать отчеты в форматы PDF, xlsx, html;
– Формировать путевые листы [7];
– Отправлять отчеты по электронной почте и на FTP сервер по заданному графику;
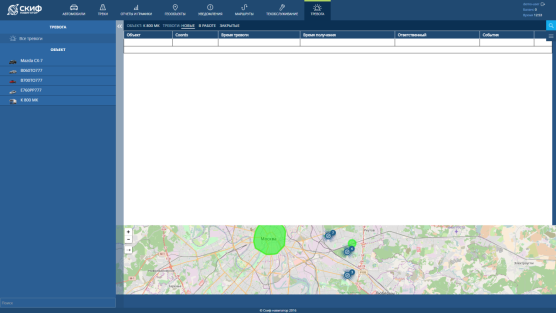
Рис. 4. Тревожные сообщения
Отчет, исходные данные
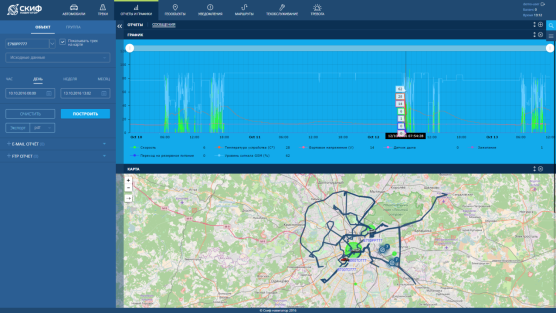
Рис. 5. Исходные данные
– Отправлять сообщения по СМС, e-mail при отклонении от заранее настроенных параметров контроля;
– Создавать, редактировать на карте геозоны различной формы, контрольные точки прохождения маршрута и получать информацию о посещении определенной геозоны или о отклонении от маршрута;
– Просматривать маршрут следования автомобиля за определенный промежуток времени.
– Осуществлять ретрансляцию данных на другие сервера;
– Осуществлять доступ к системе со смартфонов iOS и Android при помощи мобильного приложения [8];
Всё это даёт возможность увеличить безопасность и надёжность техники специального назначения, при работе в обычных и экстремальных условиях, то есть при боковом ветре или же высокой вертикальной нагрузки, при проседании грунта или перераспределении груза.
Литература:
- Григорьев М. Г. Обоснование информационных параметров для стабилизации поворотной платформы грузоподъемного автомобильного крана / М.Г. Григорьев // Сборник научных трудов. — Омск: НГАВТ, 2008. — Вып.6. — С. 120 — 125.
- Пат. 2367762 Pоссийская Федеpация, МПК Е 21 В 7/02, B 66 F 7/20. Способ ориентации-установки несущей грузовой платформы и устройство для его осуществления/ Артёмов В. В., Говоров Н. С., Говоров С. Н. № 2008100702/03; заявл. 17.01.08; опубл. 20.09.09, Бюл. № 26. 12 с.
- Щербаков В. С. Алгоритм работы системы автоматического горизонтирования опорной платформы строительной машины / В. С. Щербаков, М. С. Корытов, М. Г. Григорьев // Вестник ВГТУ. — Воронеж: ВГТУ, 2010. — Т.6. — № 3. — С. 88 — 91.
- Артюшин А.А., Смирнов И.Г, Марченко Л.А., оценка эффективности методов составления электронных карт полей // Инновационные технологии и техника нового поколения — основа модернизации сельского хозяйства: Сб. докл. Междунар. Науч.-техн. Конф. Ч. 2. — М.: ВИМ, 2011. — С. 208-220.
- И. Ф. Куштин Инженерная геодезия: учебник для вузов / И. Ф. Куштин, В. И. Куштин. Ростов- на Дону: издательство ФЕНИКС, 2002. — 416 с.
- Ямбаев Х.К. Геодезическое инструментоведение: Учебник для вузов. — М.: Академический Проект; Гаудеамус, 2011. — 583 с. — (Gaudeamus).
- Горбунова В. А. Инженерная геодезия: учеб. пособие [Электронный ресурс] : для студентов направления подготовки бакалавров 270800 Строительство, профиль Автомобильные дороги / В. А. Горбунова. — Электрон. дан. — Кемерово: КузГТУ, 2012.
- Дементьев В. Е. Современная геодезическая техника и ее применения: Учебное пособие для вузов. — Изд. 2-е. — М.: Академический Проект, 2008. — 591 с. — (Фундаментальный учебник).
