





Изложены основные результаты исследований, направленных на совершенствование научно-методического аппарата для оценки эффективности оптико-электронных систем с тепловизионными приборами. Приведены результаты оценки возможностей по обнаружению малоразмерных воздушных целей с применением тепловизора на основе неохлаждаемого фотоприёмного устройства матричного типа.
Ключевые слова: беспилотный летательный аппарат, противовоздушная оборона, обнаружение малоразмерных воздушных целей, тепловизор, микроболометрическое матричное фотоприёмное устройство, эквивалентная шуму разность температур
За последнее десятилетие в сфере построения и использования авиационной техники произошёл настоящий прорыв. Почти во всех крупных странах большое распространение получили воздушные робототехнические комплексы — беспилотные летательные аппараты (БЛА). Беспилотники успешно выполняют разведывательные, поисковые, охранные, боевые (ударные), транспортные и другие задачи. Особую роль они сыграли и продолжают играть в вооружённых конфликтах и военных операциях.
Современные БЛА отличаются небольшими габаритами, имеют специальную окраску и малую радиолокационную и оптическую заметность. Разнообразные по конструкции машины могут совершать бесшумные полёты на различных высотах: от нескольких метров до 20 км. Разведывательные и боевые воздушные роботы могут представлять угрозу для многих наземных объектов, подлежащих охране и защите. Беспилотные аппараты относятся к важным целям для средств противовоздушной обороны (ПВО).
Обнаружение, сопровождение и поражение БЛА в воздухе является сложной комплексной задачей. Для её решения создаются и применяются радиолокационные станции, оптико-электронные системы (ОЭС) с телевизионными, инфракрасными и тепловизионными камерами, а также акустические комплексы.
Важной и актуальной научно-технической проблемой является разработка, создание и применение эффективных и сравнительно недорогих тепловизионных приборов (ТПВП).
В данной статье приведены результаты изучения принципов создания и характеристик современных оптико-электронных приборов и вариантов построения тепловизионного канала ОЭС на основе неохлаждаемого фотоприёмного устройства матричного типа.
Тепловизионные приборы в зависимости от типа устанавливаемых в них фотоприёмных устройств (ФПУ) подразделяются на два класса — охлаждаемые и неохлаждаемые.
Изучение работ, посвящённых конструированию и возможностям применения тепловизоров, свидетельствует о том, что основной недостаток приборов с охлаждаемыми ФПУ заключается в необходимости иметь сложную систему агрегирования низких температур. Для выхода на рабочий режим требуется понизить температуру ФПУ до минус 190 °С. В настоящее время существует три основных типа охлаждающих систем: брызгающего типа, Джоуля-Томсона, замкнутая микрокриогенная система Стирлинга. Наибольшее распространение в силу обеспечения функциональной автономности получили приборы Стирлинга. Но реализуемое в них техническое решение замкнутого цикла охлаждения существенно увеличивает стоимость охлаждающей системы и накладывает ряд ограничений: длительное время выхода на рабочий режим и относительно небольшой эксплуатационный ресурс.
Изготавливаемые серийно неохлаждаемые фотоприёмники значительно уступали охлаждаемым по показателям чувствительности, поэтому они находили практическое применение лишь в гражданских тепловизорах для инфракрасной термографии. В конструкциях современных средств ПВО также традиционно использовались и продолжают применяться тепловизионные приборы на основе охлаждаемых ФПУ.
Вместе с тем за последние годы различные фирмы-производители стали выпускать новые матрицы и неохлаждаемые фотоприёмники. Появились высокочувствительные микроболометрические матричные фотоприёмные устройства (МФПУ) с компактной электроникой обработки сигнала, которые по стоимости в 1,5–2 раза дешевле охлаждаемых аналогов. У таких появившихся на мировом рынке модулей значение эквивалентной шуму разности температур (ЭШРТ) составляет менее 50 мК. В линейке образцов представлены МФПУ формата 320 × 256, 640 × 512 и 1024 × 768, с размером чувствительных элементов 25 и 17 мкм [1].
Можно предположить, что появление новых матричных модулей и создание на их основе тепловизионных приборов позволит значительно расширить возможности систем обнаружения и сопровождения не только воздушных целей (самолётов, вертолётов, БЛА), но и малоразмерных наземных и надводных объектов.
Порядок оценки характеристик и возможностей применения в конструкциях тепловизоров неохлаждаемых МФПУ рассмотрим на примере прибора с матрицей фирмы OPGAL формата 640 × 480 элементов с размером пикселей 17 × 17 мкм. Производителем заявлено, что при использовании объектива с относительным отверстием 1:1 значение ЭШРТ не превышает 50 мК [1].
Основные характеристики тепловизора для оценки показателей эффективности обнаружения малоразмерных объектов (целей) приведены в таблице 1.
Таблица 1
Характеристики тепловизора снеохлаждаемым матричным фотоприёмным устройством
|
Формат МФПУ |
640 × 480 |
|
Поле зрения, град. |
2,9 × 2,2 |
|
Размер элемента, мкм |
17 × 17 |
|
Диаметр входного зрачка объектива, мм |
210 |
|
Фокусное расстояние объектива, мм |
210 |
|
Материал чувствительного слоя МФПУ |
amorphous silicon |
|
Спектральный диапазон, мкм |
7,5–14 |
|
Эквивалентная шуму разность температур, K |
0,05 |
|
Время выхода на режим, с |
6 |
|
Габаритные размеры модуля МФПУ (длина × ширина × высота), мм |
48 × 33 × 40 |
|
Масса модуля МФПУ, г |
80 |
Оценка показателей эффективности применения тепловизоров с неохлаждаемыми МФПУ проводится на основе преобразования основных (базовых) параметров типовых целей и варьируемых величин, характеризующих возможные или выбранные условия функционирования тепловизионных приборов.
Обозначим: N — отношение сигнал/шум на различных дальностях до объекта обнаружения; Т![]()
![]() — коэффициент пропускания атмосферы для заданного спектрального диапазона; ΔТЭШ — эквивалентная шуму разность температур; ΔТ — типовые значения радиационного контраста объекта наблюдения.
— коэффициент пропускания атмосферы для заданного спектрального диапазона; ΔТЭШ — эквивалентная шуму разность температур; ΔТ — типовые значения радиационного контраста объекта наблюдения.
Формула для расчёта величины сигнал/шум имеет вид:
N = ΔТ · Т![]()
![]() / ΔТЭШ(1)
/ ΔТЭШ(1)
Определение коэффициента Т![]()
![]() выполняется по методике, изложенной в работе [2]. Методика позволяет учитывать спектральный диапазон ТПВП, климатический регион применения тепловизора, абсолютную влажность воздуха, метеорологическую дальность видимости и протяжённость трассы наблюдения.
выполняется по методике, изложенной в работе [2]. Методика позволяет учитывать спектральный диапазон ТПВП, климатический регион применения тепловизора, абсолютную влажность воздуха, метеорологическую дальность видимости и протяжённость трассы наблюдения.
Средняя величина коэффициента пропускания атмосферы для спектрального диапазона
Т![]()
![]() = Т
= Т![]()
![]() М · Т
М · Т![]()
![]() А(2)
А(2)
где Т![]()
![]() М — коэффициент пропускания атмосферы, характеризующий поглощение тепла атмосферными газами, Т
М — коэффициент пропускания атмосферы, характеризующий поглощение тепла атмосферными газами, Т![]()
![]() А — коэффициент пропускания атмосферы, характеризующий тепловые потери из-за аэрозольного воздействия (влажности воздуха).
А — коэффициент пропускания атмосферы, характеризующий тепловые потери из-за аэрозольного воздействия (влажности воздуха).
Практически все современные станции комплексов ПВО оснащены автоматом захвата тепловизионного изображения целей. В работе [3] показано, что для уверенного обнаружения и сопровождения воздушных целей необходимо обеспечить, соотношение сигнал/шум (N) в тепловизионных каналах не менее 6 единиц. Эта величина является пороговой характеристикой тепловизионного автомата (ТА) захвата целей на различных дальностях.
Для определения величин по формулам (1) и (2) и входящих в них характеристик принимались следующие исходные данные: модель, описывающая дисперсный состав континентального умеренного воздуха в летний сезон; спектральный диапазон 8–12 мкм, абсолютная влажность воздуха 10 г/м³; метеорологическая дальность видимости 20 км, протяжённость трассы от 1 до10 км.
Полученные соотношения сигнал/шум в видеосигнале тепловизора с ТЭШ = 50 мК при условии обнаружения малоразмерных объектов (целей) с радиационными контрастами ΔТ от 0,5 до 2 К на дальностях до 10 км показаны на графиках рисунка 1.
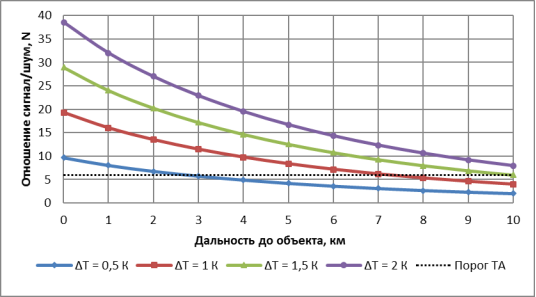
Рис. 1. Зависимость величины сигнал/шум для объектов с различными тепловыми контрастами на дальностях до 10 км
Известно, что для наблюдения за малоразмерными объектами на дальностях 3–5 км необходимо использовать объектив с фокусным расстоянием не менее 210 мм. Значения максимальной дальности обнаружения тепловизором малоразмерных воздушных объектов можно определять по методике, приведенной в работе [4]. Согласно методике с использованием критерия Джонсона устанавливается: на какой дальности минимальный (критический) размер объекта в плоскости МФПУ будет равен размеру двух чувствительных элементов.
Схема преобразования размеров объекта обнаружения в каналах тепловизора с МФПУ показана на рисунке 2.
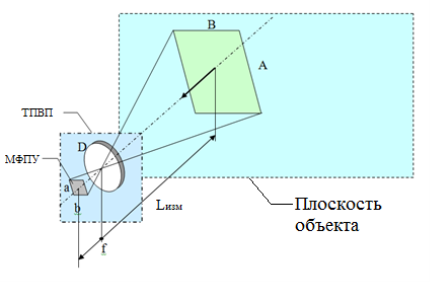
Рис. 2. Схема получения видеоизображения объекта в тепловизионном канале прибора с МФПУ
Площадь объекта в пределах поля зрения прибора на плоскости МФПУ определяется по формуле
Sab = SAB·f² / Lизм²,(3)
где f — фокусное расстояние объектива, Lизм — дальность наблюдения или измерения, SAB — площадь проекции объекта наблюдения.
Количество элементов МФПУ, воспринимающих и фиксирующих тепловое излучение от объекта (цели), определяется соотношением
Nэл = Sab / Sэл,(4)
где Sab — размер объекта (цели) на чувствительной плоскости МФПУ, Sэл — размер одного чувствительного элемента МФПУ.
Значения Nэл, рассчитанные по формулам (3) — (4) для малогабаритных объектов — БЛА площадью 0,5 и 0,25 м², — показаны на графиках рисунка 3.
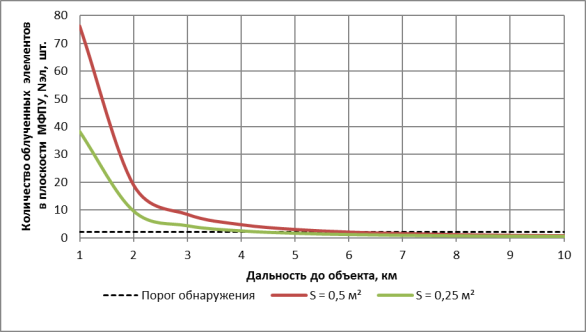
Рис. 3. Распределение количества облучённых элементов в плоскости МФПУ
По результатам проведённых расчётов, можно сделать следующие выводы.
Тепловизионный прибор, имеющий неохлаждаемую матрицу формата 640 × 480 элементов и объектив с фокусным расстоянием 210 мм может обеспечить обнаружение и сопровождение низкоконтрастных воздушных целей с ΔТ = 0,5 К на дальностях до 2,5 км. При значениях ΔТ ≥ 1 К дальность обнаружения и сопровождения малоразмерных объектов площадью 0,25 м² может достигать 4 км, а объектов площадью 0,5 м² — 5 км. Для увеличения дальности действия тепловизора, возможно использовать объектив с большим фокусным расстоянием (более 210 мм). Применение МФПУ формата 1024 × 768 позволит увеличить углы поля зрения тепловизора, тем самым расширить зону сканирования и уменьшить время тепловизионного обнаружения воздушных объектов (целей).
Использование в ОЭС тепловизоров с микроболометрическими матричными фотоприёмными устройствами, по сравнению с охлаждаемыми фотоприёмниками, может иметь ряд преимуществ: обеспечить малое время выхода на рабочий режим (менее 10 с), компактные габариты и меньшие стоимости производства и эксплуатации.
Литература:
- Opgal family catalog Document P/N TS-ENE17VJ00 2012.
- Иванов В. П. Прикладная оптика атмосферы в тепловидении. Казань: Новое Знание, 2000. — C. 127–157.
- М. М. Трестман, К. В. Егошин, Н. М. Камашева, Н. И. Харькова. Алгоритм прогноза дальностей обнаружения объектов наблюдения автоматом захвата тепловизионного канала. / НТЦ «Информатика» / Оборонная техника, 2007, № 12. — C. 48–55.
- Дж. Ллойд. Системы тепловидения. / Монография, Мир, 1978. — С. 352 –362.
