





Для решения задач мониторинга территорий и объектов, как в военной, так и в гражданской сфере применяются сверхлегкие беспилотные летательные аппараты. Главным критерием гарантии выполнения поставленной задачи является точность его позиционирования в пространстве.
Как правило, основным оборудованием для определения местоположения беспилотного летательного аппарата является GPS/ГЛОНАСС приёмник. Использование автономной системы ориентирования и методов обработки изображений и распознавания объектов, являются альтернативой спутниковым системам и технологиям навигации и наведения.
В данной статье изложены основные результаты исследований в области системного инжиниринга и проектирования, сложных приборно-функциональных систем. Проведен анализ инженерных решений, характеристик и возможностей построения систем навигации, ориентирования и наведения БЛА с лазерным приборным модулем. Предложена схема построения и алгоритм функционирования бортового модуля, включающего камеру, лазерный сканер и инерциальный измерительный блок. Приборы работают совместно, синхронно и создают в формате 3D зону с характерными точками вокруг БЛА.
Ключевые слова: беспилотный летательный аппарат (БЛА), навигационная система, автономная система ориентирования, камера, лазерный сканер, эталонное изображение, дальномеры, формат 3D.
С середины 1990-х годов благодаря появлению и началу эксплуатации Глобальной навигационной спутниковой системы GPS США стали стремительно развиваться беспилотные летательные аппараты (БЛА). Современные беспилотные машины предназначены для совершения полётов в воздушном пространстве (атмосфере) и выполнения различных задач. Отличительной чертой данного вида авиационной техники является отсутствие человека, экипажа на борту.
По сообщениям зарубежных и отечественных средств массовой информации, основным предназначением беспилотных комплексов является ведение воздушной разведки. Беспилотные машины могут оказать действенную помощь во время катаклизмов, в случаях обнаружения и ликвидации последствий, геофизических и техногенных катастроф: вести съёмку местности, находить пострадавших людей, доставлять им еду и медикаменты, патрулировать маршруты движения транспорта, осуществлять мониторинг зданий и промышленных сооружений, уточнять состояние объектов энергетики, инфраструктуры и коммуникаций [1, 2].
Для определения местоположения и управления полётом БЛА используются американская система глобального позиционирования GPS, российский аналог — ГЛОНАСС, которые обеспечивают высокую навигационную точность. Отклонения позиционирования аппаратов в полёте не превышают 10 метров [2]. Однако существуют зоны и места, в которых из-за искусственных и естественных помех сигналы GPS недоступны или имеют низкое качество приёма, например, в городах с высотными застройками и источниками (полями) сильного электромагнитного излучения. Возникает необходимость применения средств и методов управления, информационно-сигнального обеспечения, навигации и ориентирования роботизированных летательных аппаратов, прежде всего малоразмерных и маловысотных БЛА без привязки к спутниковым системам. К одним из таких средств могут относиться предназначенные для применения в специализированных навигационных системах или комплексах с БЛА оптико-электронные системы с лазерными приборами и устройствами, обеспечивающими управляемый полёт с построением и реализацией 3D моделей местности и пространства.
Сегодня беспилотные машины строятся с использованием разнообразных аэродинамических схем и функциональных компонентов. В зависимости от используемой системы управления они подразделяются на два класса: БЛА с автоматизированным радиокомандным управлением и БЛА с системами программного управления. Особенностью аппаратов с дистанционным управлением (1 класса) является участие в процессе управления полётом человека-оператора, который располагается, как правило, в наземном пункте управления. Программно-пилотируемые БЛА (2 класса) — автономные воздушные роботы. Они способны совершать полёт и решать задачи по заранее составленной программе без участия человека-оператора [1, 2].
Подавляющее большинство созданных и применяемых образцов БЛА имеют радиокомандную и комбинированную системы управления. Как сообщали зарубежные источники, при эксплуатации БЛА возникают трудности, связанные с управлением аппаратами в воздухе. Значительное число аварий машин произошли из-за ошибок операторов. По данным ВВС США, за 2012 год потери составили 70 беспилотных самолётов. Они объясняются, в первую очередь ошибками и недостаточным уровнем подготовки операторов. Радиоуправление остаётся задачей, решение которой требует достижения высоких профессиональных навыков. Например, в армии США операторами БЛА становятся действующие пилоты ВВС после годичной переподготовки [3].
Проектирование, построение и применение полностью автономных воздушных роботов, «умных» БЛА различного назначения является одним из приоритетных направлений развития авиационной техники и технологий двойного назначения. Многие производители пытаются создать программно-пилотируемые аппараты с применением искусственного интеллекта. При этом большую роль играет совершенствование оптико-электронных систем, создание и внедрение приборов и технологий 3D моделирования местности, получения голографических изображений объектов, миниатюрных комплексов сверхскоростной обработки и передачи информации.
Цель работы — на основе принципов системного инжиниринга и методов проектирования оптико-электронных систем определить состав и схему функционирования автономной лазерной системы ориентирования БЛА для моделирования процессов управления полётом и оценки параметров функционирования воздушных роботов в формате 3D.
АСО БЛА являются одним из главных средств развития автоматических систем управления движением в условиях, когда объём поучаемой информации в полёте минимален и для решения задач управления необходимо проводить анализ внешней обстановки в режиме реального времени [4].
АСО находят применение в современных космических, авиационных, наземных, надводных и подводных мобильных объектах. Поэтому определение позиционирования и построение маршрута БЛА при помощи АСО на основе 3D моделирования, является актуальной темой для исследования.
Использование технологий АСО для управления инаведения БЛА
Использование технологий АСО и методы обработки изображений и распознавания образов в формате 3D, являются альтернативой GPS/ГЛОНАСС технологиям систем навигации и наведения БЛА.
Понятие «D» (от англ. Dimension — измерение), где разделяют:
‒ 1D — одномерное пространство с одной пространственной характеристикой — длина;
‒ 2D — двухмерное пространство с двумя пространственными характеристиками — длина и ширина;
‒ 3D — трёхмерное пространство с тремя пространственными характеристиками — длина, ширина и высота.
Таким образом, представление объектов в 2D является плоским, а в 3D многомерным.
Для ориентации в пространстве используются различные АСО: дальномеры, сонары, стереозрение и прочее. Сканирующие сонары и дальномеры формируют области точек, которые они получили. Стереозрение формирует видеоинформацию с каждой видеокамеры стереопары.
На рис.1 показана принципиальная схема передачи изображения от датчика до устройства предобработки и процессор, информация от которого поступает к системе управления и оператору.
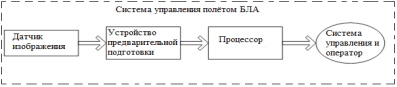
Рис. 1. Состав и принципиальная схема работы ОЭС БЛА
Основные задачи, возлагаемые на ОЭС с лазерными приборами, относят [5]:
‒ формирование модели окружающей внешней среды;
‒ фиксирование отдельных объектов и определение их параметров;
‒ идентификация критических (опасных) объектов при выполнении поставленных задач полёта.
Сущность технологии АСО для ориентирования и наведения БЛА заключается в сопоставлении текущего и эталонного изображений, с локализацией и сенсоризацией на текущем изображении заданных объектов и определением значений текущих координат этих объектов для формирования сигналов управлении полётом летательного аппарат с использованием:
‒ априорной информации для построения эталонного изображения;
‒ апостериорной информации, представляющей собой текущее и изображение на выходе.
На рис. 2 показаны состав и структурно-функциональная схема автономной системы наведения [2].
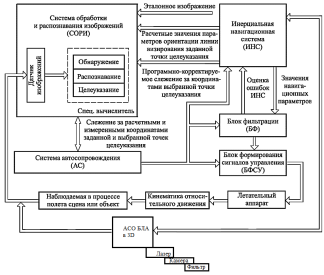
Рис. 2. Состав и структурно-функциональная схема наведения БЛА и место в ней АСО
Процесс формирования эталонных изображений объектов ориентирования в формате 3D можно представить в виде поэтапного выполнения следующих процедур (рис. 3):
1-й этап — Выбор объекта изображения;
2-й этап — формирование форма 2D (2D-описание);
3-й этап — Преобразование рассеянного изображения в трехмерные структуры (3D-описание);
4-й этап — получение трехмерной геометрической модели.
Начальное входное изображение может представлять собой одиночное черно-белое или цветное изображение, стереопару. Примером двумерных элементов, выделенных из исходного изображения, могут служить вершины объектов, линии и области равномерной яркостной интенсивности. К трехмерным структурам, соответствующим двумерным элементам предыдущего уровня, относятся возвышения, границы объектов, участки земной поверхности и т. п.

Рис. 3. Схема формирования реального изображения в АСО в формате 3D
При построении таких структур из двумерных элементов суммируются данные о разрешающей способности аппаратуры, знания о рассматриваемой области и данные, полученные из изображения, что позволяет получить в результате преобразований на 3 этапе трёхмерное так называемое «рассеянное» контурное изображение сцены. При построении геометрической модели из набора трёхмерных структурных компонентов используются методы описания границ, поверхностей, объёмов [6].
Лазерные приборы иошибки измерений вформате 3D
В качестве средств для создания 3D модели окружающего пространства могут рассматриваться лазерные дальномеры японского и американского производства. На сегодняшний день перспективными являются АСО на базе сканирующих лазерных дальномеров — 2D или 3D лазерных дальномеров (рис.4) [7,8].

Рис. 4. Внешних вид лазерных дальномеров
Основные технические характеристики лазерных дальномеров приведены в таблице 1.
Таблица 1
Технические характеристики лазерных дальномеров
|
Название |
Hokuyo UTM-30LX |
HDL-32e |
|
Производитель |
Япония |
США |
|
Дальность действия, м |
60 |
100 |
|
Точность измерения, см |
± 5 см |
± 2 см |
|
Вертикальный угол обзора, ° |
25 |
-10÷30 |
|
Горизонтальный угол обзора, ° |
270 |
360 |
|
Масса, г |
210 |
1000 |
|
Габариты, мм |
60 × 60 × 87 |
Ø85 × 144 |
|
Скорость сканирования |
25 мс/скан в горизонтальной плоскости |
700000 точек в секунду |
|
Количество лазерных лучей, шт. |
1 |
32 |
|
Цена (ориентировочно), руб. |
478 500 |
850 000 |
Если 3D-лазерные сканеры, дают возможность получать 3D-модель окружающей среды, то 2D-лазерные сканеры позволяют создать 3D-модель в процессе полёта БЛА [9].
Данные обработки и определения дальности с помощью дальномеров и сонаров могут аппроксимироваться в системе при помощи метода Ramer-Douglas-Peucker [10, 11]. Обработка и определение дальности распределённых по ломаной линии предусматривает аппроксимацию кривой, позволяет строит ломаную с меньшим числом точек. Это позволяет строить и рассматривать области точек и представлять их в виде прямых.
Для стереозрения обработка данных и получение изображений объекта, выполняется с использованием библиотеки алгоритмов компьютерного зрения OpenCV. Алгоритм из этой библиотеки позволяет строить карту глубины по двум изображениям стереопары [12].
Определение текущих координат проводится по результатам обработки информации, поступающей от бортового 3D-лазерного сканера и малогабаритных трёхосных акселерометра и гироскопа. Измерение абсолютных значений углов наклона и крена возможно с помощью акселерометра, а гироскоп даёт значения углов наклона, крена и курса с погрешностью, из-за ухода «нуля» и ошибки интегрирования угловых скоростей. Изображения, создаваемые 3D-лазерным сканером при измеренном угле наклоне и крена БЛА позволяют измерять высоту, а последовательность изображений-точек в формате 3D с учётом условий полёта и параметров, — приращения долготы, широты (или приращения горизонтальных линейных координат Δx, Δy) и уточнять курс (Δφ) методами экстремальной навигации. В согласовании с данными сканирующих лазерных сенсоров рассогласование измерений дальности может находиться в пределах 3–5 см. [12]. Следовательно, ошибка вычисления приращения координат в одном цикле измерений может составлять не более 0,5 см по линейным координатам и не более 0,2 градусов по курсу. Пороговые значения ошибок приведены на графиках рисунка 6.
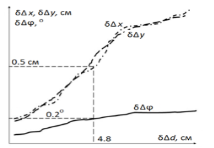
Рис. 6. Распределение ошибки вычисления приращения координат от точности измерения дальности
Основные условия ифакторы обеспечения полёта
При моделировании необходимо учитывать основные условия и факторы полёта, поэтому выделяется три основных этапа автономного полёта БЛА:
- Разработка и анализ полётного задания;
- Определение и построение маршрута полёта (ПМП);
- Автономный управляемый полёт БЛА с корректировкой траектории по результатам работы АСО в формате 3D.
Определение маршрута полёта — это поиск наиболее рациональной траектории полёта БЛА от начальной (стартовой) позиции до конечной, с учётом необходимости решать задачи облёта встречных преград различного типа и динамических характеристик объекта поиска (цели). Маршрут рассчитывается и определяется его задаваемыми параметрами, достигающих экстремальных значений, в качестве которых с выполнением требований от постановки задачи, например, выбираются такие характеристики, как время полёта, затрачиваемый ресурс на полёт БЛА, отклонение (промах) в конце маршрута и т. п.
В процессе полёта беспилотного аппарата, с его начала и до конца маршрут от начального до конечного положения параметры нахождения аппарата в пространстве определяются на каждом установленном расчётном этапе. Считается на основе метода управления с прогнозирующими моделями. Причём каждый отдельный участок маршрута полёта получается на временном, ограниченном интервале в результате решения задач оптимизации. Данный цикл оптимизации повторяется и продолжается в течение всего полёта. Таким образом, можно наблюдать ряд вероятных опорных точек полёта, по очереди, соединив которые, определяется полная траектория полёта БЛА (рис. 7). При этом происходит сглаживание полученных точек в режиме реального времени, чтобы возможно было рассчитать допустимую 3D пространственную траекторию с учётом динамики (эволюции) полёта БЛА.
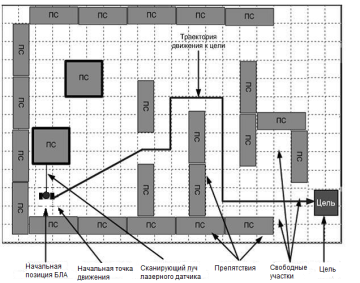
Рис. 7. Планирование полёта с учётом возникающих препятствий
В условиях, когда дистанционное управление БЛА затруднительно или невозможно находить применение автономной оптической навигации при помощи АСО с 3D моделированием местности, навигация и наведение БЛА происходит следующим образом:
Сопоставляются полученные в АСО текущее и эталонное 3D изображения, с последующим выделением на текущем изображении заданных объектов с целью формировании сигналов управлении движением летательного аппарат. Объекты выделяются на трёхмерной сцене по мере обработки данных системой и нахождения новых во внешней среде. После сканирования и обработки всей видимой области внешней среды образуется трехмерная сцена из видимых частей объектов, описанных плоскостями обнаруженных сторон объектов.
АСО должна сканировать с достаточной частотой по времени для того, чтобы быть в состоянии улавливать изменения положения и ориентации объекта для дополнения его формы и обновления его на трехмерной сцене.
Литература:
- Исламов В. К. История создания и применения БЛА / Труды I-й Военно-научной конференции «Роботизация ВС РФ» — М.: ФГБУ ГНИИЦ РТ МО РФ, 2016. — 470 с.: ил. — С. 118–130.
- Управление и наведение беспилотных манёвренных летательных аппаратов на основе современных информационных технологий / Учеб. пособие. Под ред. М. Н. Красильщикова и Г. Г. Себрякова. — М.: ФИЗМАТЛИТ, 2003. — 280 с.
- Nick Turse статья в журнале TomDispatch.com «American empire project» 2012 // URL: americanempireproject.com/blog/the-crash-and-burn-of-robot-warfare
- Техническое зрение в системах управления мобильными объектами. Труды научно-технической конференции-семинара. Вып. 4 / Под ред. Р. Р. Назирова. — М.: КДУ, 2011. — 328 с.
- Юревич Е. И. Сенсорные системы в робототехнике / Учеб. пособие. СПб.: Изд-во Политехнического университета, 2013. — 100 с.
- Современные информационные технологии в задачах навигации и наведения беспилотных маневренных летательных аппаратов / Под. ред. М. Н. Красильщикова, Г. Г. Себрякова. — М.: ФИЗМАТЛИТ, 2009. — 556 с.
- Scanning Rangefinder Distance Data Output/UTM-30LX Product Details // URL: https://www.hokuyo-aut.jp/02sensor/07scanner/utm_30lx.html
- HDL-32E // URL: http://velodynelidar.com/hdl-32e.htm
- Загоруйко С. Н., Носков В. П. Навигация БЛА и 3D-реконструкция внешней среды по данным бортовой АСО // Мехатроника, автоматизация, управление. 2014. № 8. — С. 62–67.
- U. Ramer. An iterative procedure for the polygonal approximation of plane curves // Computer Vision, Graphics, and Image Processing, 1. 1972. 244–256 s.
- David Douglas, Thomas Peucker. Algorithms for the reduction of the number of points required to represent a digitized line or its caricature // The Canadian Cartographer. № 10(2). 1973. S.112–122.
- Носков В. П., Носков А. В. Навигация мобильных роботов по дальнометрическим изображениям // Мехатроника, автоматизация, управление. 2005, № 12. — С. 16–21.
- Носков В. П., Рубцов И. В. Формирование объединённой модели внешней среды на основе информации видеокамеры и дальномера // Мехатроника, автоматизация, управление. 2007, № 8. — С. 2–5.
