





Выполняется модернизация робота-сиделки «RIBA». Данный робот будет не только перемещать человека на кровать или кресло, он сам сможет служить инвалидным креслом-коляской. Это значительно сэкономит место в палатах больниц, а также денежные средства.

Рис. 1. Робот-сиделка
Ключевые слова: медицина, робот-сиделка, помощь инвалидам, кресло-коляска.
Сидение или кресло будет иметь четыре степени свободы (подвижности). Суть такого кресла в том, что оно находится прямо на роботе, пациенту не придётся самому крутить колёса и прилагать какие-либо усилия, чтобы доехать до своей цели. Робот может перемещаться самостоятельно, а значит, что и возить человека будет робот, а не врач, это сэкономит время и силы тех, кто раньше возил людей используя кресло-коляску.
Пациенту или пожилому человеку достаточно дождаться пока робот перенесёт его и усадит в кресло, находящееся на роботе-сиделке. Находясь в кресле человеку будет достаточно использовать одну руку для управления роботом, поскольку перемещения этого робота могут контролироваться рычагом и кнопками, находящимися возле сенсорного дисплея. Если же пациент или пожилой человек не может использовать даже руки для передвижения робота, то он может воспользоваться голосовыми командами, которые уже имеются в этой модели робота.
Таким образом для создания компактного кресла нам понадобится четыре степени подвижности в сумме. Но мы рассмотрим основательно только две из них, поскольку другие две не так сильно влияют на предназначение кресла, они могут быть созданы для удобства пациентов, а основные три влияют именно на перемещение кресла и динамику подвижности (рис. 2).
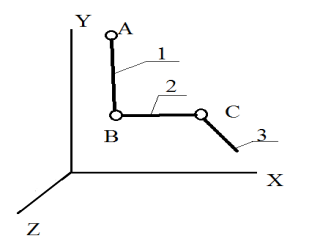
Рис. 2. А — Соединяет верх спинки и тело робота. В — Соединяет спинку и сидение. С — Соединяет сидение и подножку. 1 — спинка, 2 — сидение, 3 — подножка
В точке А возможно лишь вращательное движение относительно оси Z. В точке В имеется две степени подвижности, вокруг оси Z и вдоль оси X. В точке C имеется одна степень подвижности это вокруг оси Z. Поскольку все точки звеньев описывают траектории, лежащие в параллельных плоскостях, то этот механизм является плоским. Тогда степень подвижности этого механизма можно вычислить по формуле:
W = 3*n — 2*P5 — Р4 = 3*3–2*2–1 = 4.
Где P5 — количество кинематических пар 5 класса, а Р4 — количество кинематических пар 4 класса.
Степени подвижности приводятся в движение с помощью электродвигателей, передающих силу и вращающий момент этим звеньям.
Плюсы модернизации:
‒ С помощью регулируемой подножки пациенту смогут поставить рекомендуемый угол наклона ног.
‒ Кресло складывается и благодаря этому не сильно увеличивает габариты робота.
‒ Человеку и врачам не надо прилагать физических усилий на передвижение сидящего в кресле.
‒ Благодаря хорошей подвижности кресла можно подобрать подходящие углы наклона спинки и сидения для каждого пациента индивидуально.
‒ Такое кресло намного удобнее, надёжнее и практичнее, чем обычное кресло-коляска.
Используя робота-сиделку врачи и пациенты могут не волноваться, ведь робот удачно справится со своей предназначенной работой, пациенты могут не волноваться о том, что врач не сможет их удержать, ведь в наше время доверие технике куда больше, чем людям. Это принесёт дополнительные удобства врачам и пациентам, а также сэкономит время и затраты на оборудование.
Литература:
- Поезжаева Е. В., Теория механизмов и механика машин. Промышленные роботы: учеб. Пособие: Изд-во Перм. Гос. техн. ун-та, 2016.-Ч.2.-185с. Гриф УМОАМ.
- Поезжаева Е. В. Промышленные роботы: учеб. пособие 3 кн.– Пермь: Издательство ПГТУ. Пермь 2009. Гриф МГТУ им. Н. Э. Баумана.
- Поезжаева Е. В. Концепция развития робототехники: учеб. Пособие: Изд-во Перм. Гос. техн. ун-та, 2017.-480с. Гриф МГТУ им. Н. Э. Баумана.
