





Моделирование асинхронного двигателя с переменными IS – IR на выходе апериодических звеньев в системе абсолютных единиц в Simulink-Script
Емельянов Александр Александрович, доцент;
Пестеров Дмитрий Ильич, студент;
Вотяков Александр Сергеевич, студент;
Захаров Александр Олегович, студент;
Соснин Александр Сергеевич, студент;
Гусев Владимир Михайлович, магистрант
Российский государственный профессионально-педагогический университет (г. Екатеринбург)
Бесклеткин Виктор Викторович, магистрант
Уральский федеральный университет имени первого Президента России Б. Н. Ельцина (г. Екатеринбург)
Быстрых Денис Анатольевич, начальник конструкторско-технологического бюро
АО «Уральский турбинный завод» (г. Екатеринбург)
Габзалилов Эльвир Фиргатович, магистрант.
Уральский государственный горный университет (г. Екатеринбург)
В работе [1] дано математическое моделирование асинхронного двигателя с переменными is – ir в системе относительных единиц. В данной работе приведена модель асинхронного двигателя с этими же переменными в системе абсолютных единиц.
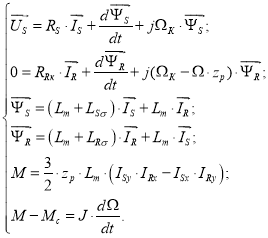
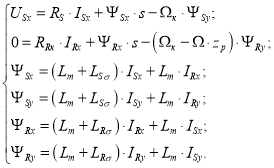
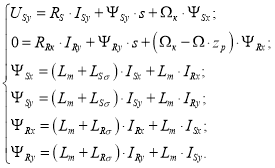
Векторные уравнения асинхронного двигателя имеют следующий вид:
Переведем систему уравнений к изображениям ![]() :
:
|
|
(1) |
|
(2) |
|
|
(3) |
|
|
(4) |
|
|
(5) |
|
|
(6) |
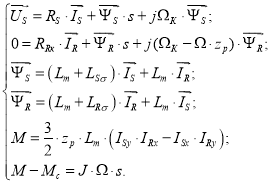
Схема замещения и векторная диаграмма в системе абсолютных единиц [3] приведены на рис. 1 и 2.
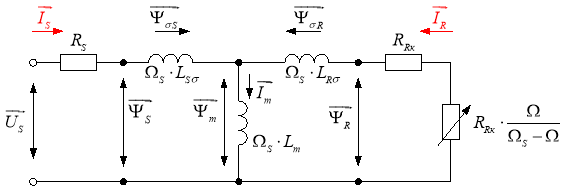
Рис. 1. Схема замещения асинхронного двигателя в системе абсолютных единиц
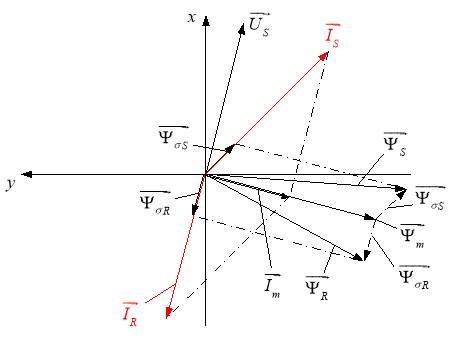
Рис. 2. Качественная картина расположения векторов в двигательном режиме в системе абсолютных единиц
Разложение векторных величин по проекциям:
![]()
![]()
![]()
![]()
![]()
Записываем уравнения (1), …, (4) по проекциям.
Уравнение (1):
![]()
|
По оси (+1): |
|
(1’) |
|
По оси (+j): |
|
(1”) |
Уравнение (2):
![]()
|
По оси (+1): |
|
(2’) |
|
По оси (+j): |
|
(2”) |
Уравнение (3):
|
По оси (+1): |
|
(3’) |
|
По оси (+j): |
|
(3”) |
Уравнение (4):
![]()
|
По оси (+1): |
|
(4’) |
|
По оси (+j): |
|
(4”) |
Рассмотрим систему уравнений (1’), …, (4’) по оси (+1):
Подставим (3’), (3”), (4’) и (4”) в уравнения (1’) и (2’):
|
|
(7) |
|
|
(8) |

Исключим слагаемые с ![]() . Для этого умножим уравнение (7) на (Lm+LRσ), а уравнение (8) – на Lm:
. Для этого умножим уравнение (7) на (Lm+LRσ), а уравнение (8) – на Lm:


Наконец, вычтем второе уравнение из первого:
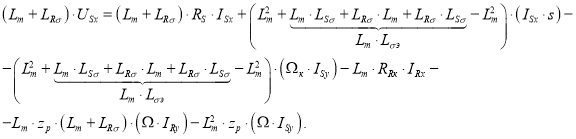
Разделим обе части уравнения на (Lm+LRσ):

Обозначим:
![]()
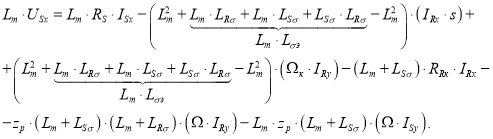
Получим:

Перенесем слагаемые с ISx в левую часть:

Обозначим:
![]()
Отсюда проекция статорного тока по оси x:

Структурная схема для определения статорного тока ISx приведена на рис. 3.
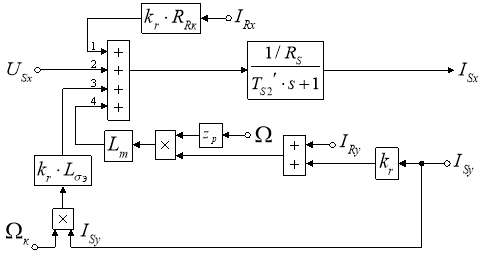
Рис. 3. Структурная схема для определения статорного тока ISx
Повторим уравнения (7) и (8):
![]()

Исключим слагаемые с ![]() . Для этого умножим уравнение (7) на Lm, а уравнение (8) – на (Lm+LSσ):
. Для этого умножим уравнение (7) на Lm, а уравнение (8) – на (Lm+LSσ):
![]()

Вычитаем второе уравнение из первого:
Разделим обе части уравнения на (Lm+LSσ):

Обозначим:
![]()
Получим:
Перенесем слагаемые с IRx в левую часть:

Обозначим:
![]()
Определим проекцию тока ротора по оси x:

Структурная схема для определения тока IRx приведена на рис. 4.
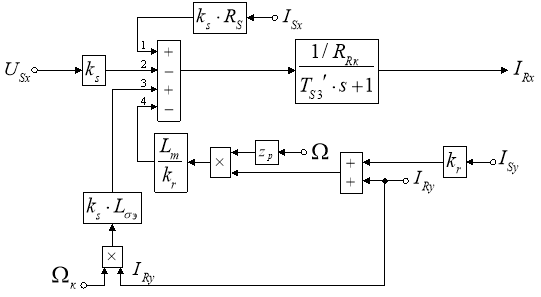
Рис. 4. Структурная схема для определения тока IRx
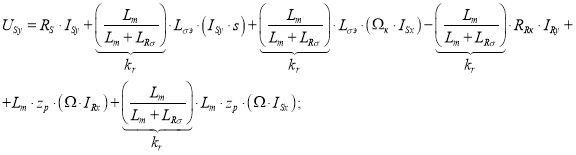
Рассмотрим систему уравнений (1”), …, (4”) по оси (+j):
Подставим (3”), (3’), (4”) и (4’) в уравнения (1”) и (2”):
|
|
(9) |
|
|
(10) |

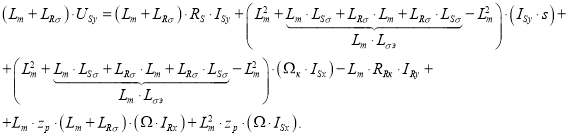
Исключим слагаемые с ![]() . Для этого уравнение (9) умножим на (Lm+LRσ), а уравнение (10) – на Lm.
. Для этого уравнение (9) умножим на (Lm+LRσ), а уравнение (10) – на Lm.


Вычтем второе уравнение из первого:
Разделим обе части уравнения на (Lm+LRσ):
![]()
Перенесем слагаемые с ISy в левую часть:

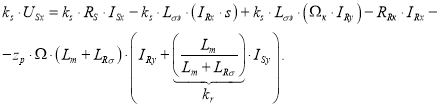
Проекция статорного тока на ось y определится следующим образом:

Структурная схема для определения статорного тока ISy приведена на рис. 5.
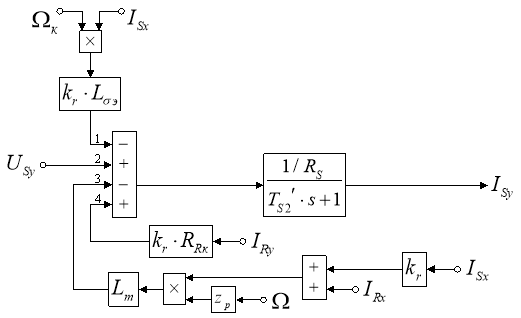
Рис. 5. Структурная схема для определения статорного тока ISy
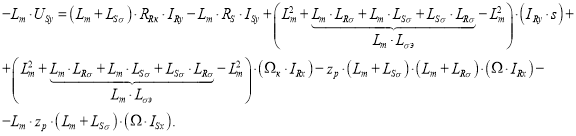
Повторим уравнения (9) и (10):
![]()

Исключим слагаемые с ![]() . Для этого умножим уравнение (9) на Lm, а уравнение (10) – на (Lm+Lσs).
. Для этого умножим уравнение (9) на Lm, а уравнение (10) – на (Lm+Lσs).
![]()

Вычтем первое уравнение из второго:
Разделим обе части уравнения на (Lm+LSσ):
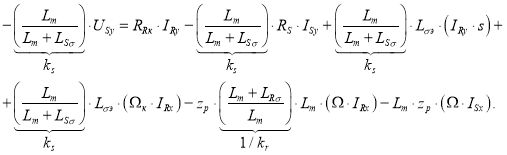
Получим:
![]()
Перенесем слагаемые с IRy в левую часть:

Определим проекцию тока ротора по оси y:

Структурная схема для определения тока IRy приведена на рис. 6.
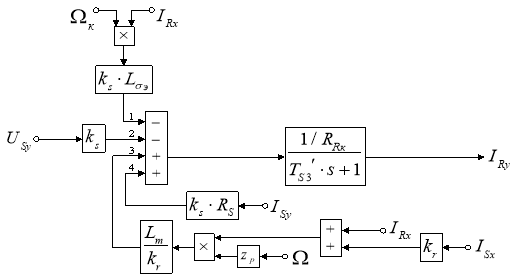
Рис. 6. Структурная схема для определения тока IRy
На рис. 7 представлена структурная схема для реализации уравнения электромагнитного момента (5):
![]()
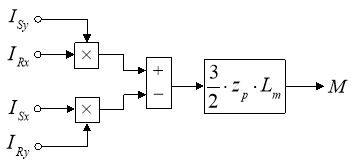
Рис. 7. Математическая модель определения электромагнитного момента M
Наконец, из уравнения движения (6) выразим механическую угловую скорость вращения вала двигателя (рис. 8):
![]()
![]()

Рис. 8. Математическая модель уравнения движения
Математическая модель асинхронного двигателя с короткозамкнутым ротором с переменными IS – IR на выходе апериодических звеньев в системе абсолютных единиц приведена на рис. 9. Параметры асинхронного двигателя рассмотрены в работах [2] и [3].
Расчет параметров производим в Script:
|
PN=320000; UsN=380; IsN=324; fN=50; Omega0N=104.7; OmegaN=102.83; nN=0.944; cos_phiN=0.92; zp=3; Rs=0.0178; Xs=0.118; Rr=0.0194; Xr=0.123; |
Xm=4.552; J=28; Ub=sqrt(2)*UsN; Ib=sqrt(2)*IsN; OmegasN=2*pi*fN; Omegab=OmegasN; Zb=Ub/Ib; Psib=Ub/Omegab; Lb=Psib/Ib; rs=Rs/Zb; lbs=Xs/Zb; rr=Rr/Zb; lbr=Xr/Zb; |
lm=Xm/Zb; Lm=lm*Lb; ks=lm/(lm+lbs); kr=lm/(lm+lbr); betaN=(Omega0N-OmegaN)/Omega0N; lbe=lbs+lbr+lbs*lbr*lm^(-1); Lbe=lbe*Lb; roN=0.9962; rrk=roN*betaN; RRk=rrk*Zb; Ts2=kr*Lbe/Rs; Ts3=ks*Lbe/RRk; |
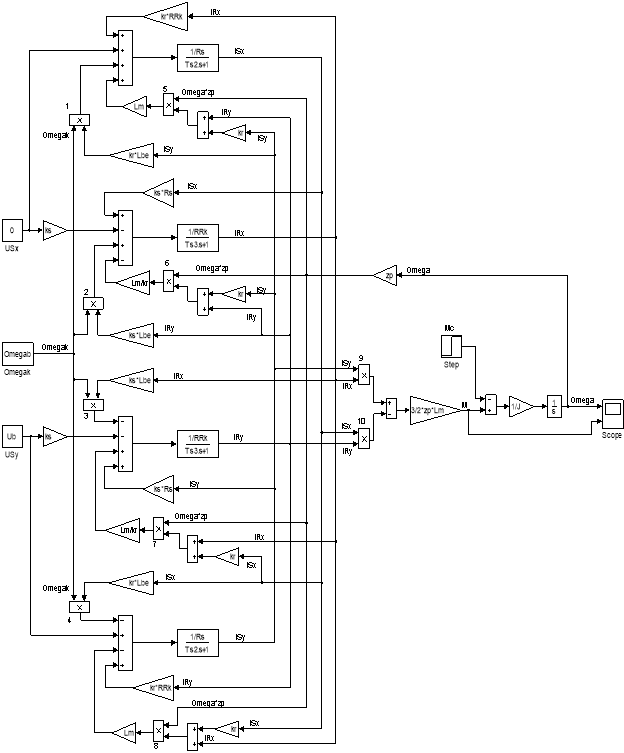
Рис. 9. Математическая модель асинхронного двигателя с переменными IS – IR на выходе апериодических звеньев в системе абсолютных единиц
Числовые значения параметров выводятся в окне Workspace (рис. 10).
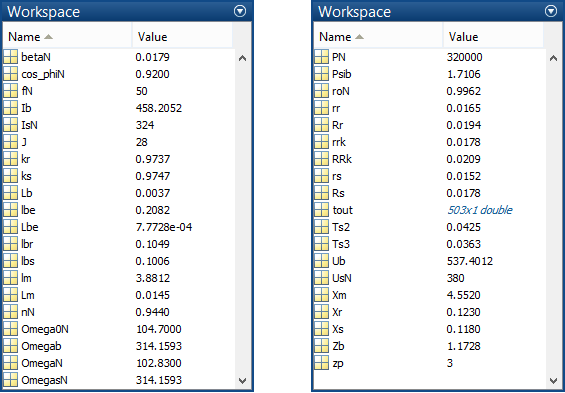
Рис. 10. Числовые значения параметров в окне Workspace
Результаты моделирования асинхронного двигателя представлены на рис. 11.
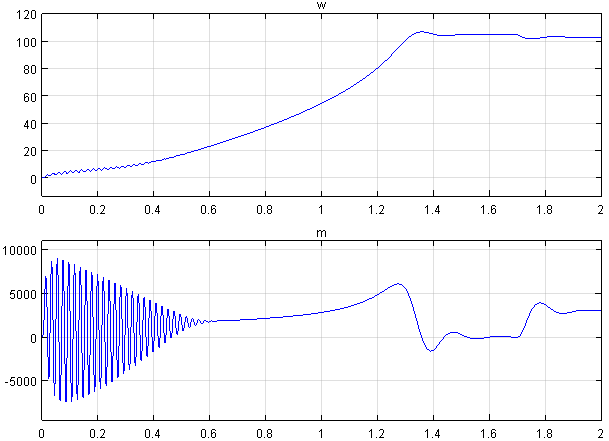
Рис. 11. Графики скорости и момента
Литература:
- Емельянов А.А., Бесклеткин В.В., Пестеров Д.И., Юнусов Т.Ш., Воротилкин Е.А., Камолов И.И., Карпенко К.Д., Попов С.Ю., Зашихин Е.В., Серебров А.А., Власова А.А. Математическая модель асинхронного двигателя с переменными is – ir на выходе апериодических звеньев в Simulink-Script // Молодой ученый. - 2016. - №30. - С. 14-28.
- Шрейнер Р.Т. Математическое моделирование электроприводов переменного тока с полупроводниковыми преобразователями частоты. – Екатеринбург: УРО РАН, 2000. - 654 с.
- Шрейнер Р.Т. Электромеханические и тепловые режимы асинхронных двигателей в системах частотного управления: учеб. пособие / Р.Т. Шрейнер, А.В. Костылев, В.К. Кривовяз, С.И. Шилин. Под ред. проф. д.т.н. Р.Т. Шрейнера. - Екатеринбург: ГОУ ВПО «Рос. гос. проф.-пед. ун-т», 2008. - 361 с.
