





В статье рассмотрен алгоритм построения Байесовой сети, на основании которой в дальнейшем предполагается управлять транспортным потоком.
To control traffic flow Bayesian network consists of nodes and directional causality between variables. Each node has a finite set of mutually exclusive states. Directed edges represent the causal relationship between variables. Tops and directed bonds form a directed graph without cycles.
В настоящее время развитие транспортной сети и увеличение количества автомобилей сделало актуальной задачу создания автоматизированной системы дорожного движения (АСУ ДД), которая бы осуществляла функции контроля дорожной ситуации и управления транспортным потоком. В решения этой задачи для мониторинга состояний и свойств сложных объектов непрерывном изучении свойств и характеристик этих объектов путем обобщения прошлого опыта работы и вновь поступающей информации с позиций измерительного подхода, принципиальную основу которого составляет метрологическое обоснование получаемых решений в данной работе предлагается использование байесового сетевого подхода. Новые знания, получаемые в ходе такого измерительного процесса, объединяются с массивами прошлых и служат априорной информацией для будущих экспериментов мониторинга. Байесова сеть для управления транспортным потоком состоит из вершин и направленных причинно-следственных связей между переменными. Каждая вершина имеет конечное множество взаимоисключающих состояний. Направленные рёбра отражают причинно-следственную связь между переменными. Вершины и направленные связи образуют ориентированный граф без циклов. Для каждой переменной А с родителями В1….Вn задаётся таблица условных вероятностей Р (А|В1…., Вn), численно выражающая причинную связь между ними. На рис. 1 показан пример байесовой сети.
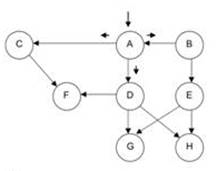
Рис. 1 Байесова сеть
Допустим, что U – пространство переменных. Предположим, что мы имеем беспрепятственный доступ к P(U), объединённой таблице вероятностей, тогда распределение вероятностей Р(А) для любой переменной А из U можно легко вычислить при помощи маргинализации.
 (1)
(1)
Байесова сеть на U - это более компактное представление P(U), т.е., это способ хранения информации, исходя из которой, при необходимости можно вычислить P(U). Допустим, что BN - Байесова сеть на основе U = {A1, …An}. Если условные независимости в BN действительны и для U, тогда P(U) является результатом произведения всех условных вероятностей, заданных в BN [14].
 (2)
(2)
где pa(Ai) – это родительский комплект Ai, а pa(Ai| pa(Ai)) – наше априорное знание об Ai в U.
Допустим, что А – переменная в U с n состояниями. Вывод f по A – это n-мерная таблица нулей и единиц. Способ введения f в BN можно представить как перемножение Рa(А) с таблицей f, в результате чего получается Рa(А,е), где е – это свидетельство того, что в вершине произошло некоторое событие.
Используя уравнение (1) и обновлённое распределение вероятностей P(U|e), можно вычислить апостериорное распределение вероятностей любой переменной А в U, P(A|e).
Для построения таблицы условных вероятностей байесовой сети, сеть делится на несколько кластеров, которые содержат пары узлов родитель-дочка. В каждом кластере узлов из каждого элемента знания, касающегося взаимоотношений между определённым параметром дорожного движения и событиями, относящимися к состоянию движения, составляется субъективные правила движения. Наконец, этим правилам присваиваются численные значения, и они преобразуются в элементы таблицы условной вероятности, которые прикрепляются к узлам данного кластера. Важным моментом в управлении потоком является выбор пороговых значений параметров дорожного движения (интенсивности движения, заполненность определённого пространства и скорость). Пороговые величины используются для определения состояний параметров дорожного движения.
Прозрачность байесовой сети обеспечивает полный доступ к её таблицам условных вероятностей. Путём обновления определённых элементов байесовой сети можно на любой стадии эффективно учесть любые изменения условий дорожного движения. Эта особенность может рассматриваться как субъективное обучение сети, а выбор пороговых величин параметров дорожного движения как субъективная оценка конкретных обстоятельств дорожного движения.
Литература
- Woolley, J.E., Taylor, M.A.P., Zito, R., 2001. Modelling of the Southern Expressway using Paramics mirosimulation software. Journal of the Eastern Asia Society for Transportation Studies 4 (4), 279–295.
- Zhang, K., Taylor, M.A.P., 2002. Automated incident detection – Bayesian networks approach. In: Proceedings of the 24th Conference of Australian Institutes of Transport Research, Sydney.
- Zhang, K., Taylor, M.A.P., 2004. Incident detection on freeways: a Bayesian network approach. In: Proceedings of the 27th Australasian Transport Research Forum, Adelaide.
- Thomas, K., Dia, H., Cottman, N., 2001. Simulation of arterial incident detection using neural networks. In: 8th World Congress on ITS,Sydney.
- Woolley, J., Dyson, C., Taylor, M.A.P., 2001. Evaluation of a South Australian 40 km/h urban speed limit. Transport Engineering in Australia 7 (1–2).
- Yuan, F., Cheu, R.L., 2003. Incident detection using support vector machines. Transportation Research C 11, 309–328.
