





В данной работе производится компьютерное моделирование системы солнечной батареи я фиксированного типа с системой отслеживания солнца. На основе сравнения двух моделей делается заключение об эффективности использования конкретного типа солнечных батарей на территории города Ташкент, Республика Узбекистан. Моделирования производится на основе программного обеспечения SAM=System Advisor Model.
Ключевые слова: солнечная батарея, модуль, инвертор, трекерная система.
Как известно, продуктивность работы солнечных панелей напрямую зависит от количества получаемой солнечной энергии. Максимального значения генерация электричества достигает в момент, когда рабочая поверхность солнечных модулей (пластин) располагается перпендикулярно потоку солнечного излучения.
С учетом особенности траектории ежедневного движения солнца, оптимальным расположением неподвижной (стационарной) солнечной батареи по азимуту является угол порядка 150°. Практические опыты показывают, что зафиксированный в таком положении (в направлении, проходящем по середине между точками восхода и заката) солнечный модуль в вечернее и утреннее время теряет порядка 75 % генерации от максимально возможного объема.
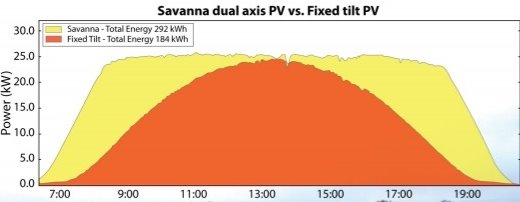
Динамические системы крепления PV панелей (подвижные трекеры) служат для обеспечения автоматического слежения за положением солнца на протяжении всего светового дня и ориентации закрепленных на них солнечных батарей, а так же обеспечивают коррекцию угла наклона панели в зависимости от времени года. Установка трекерной системы позволяет добиться увеличения выработки электроэнергии на 30–40 % по сравнению с солнечными электростанциями, использующими неподвижно закрепленные солнечные батареи.
Рисунок ниже наглядно иллюстрирует как изменяется типовой дневной график генерации электроэнергии при переходе со стационарных опорных металлоконструкций для солнечных батарей на подвижные двухосевые трекерные системы [4]:
Для моделирования вводим все необходимые данные:
- Метеорологические данные для города Ташкент «SAM» загрузит с National Solar Radiation Database (NSRDB). Так, например, среднегодовая температура Ташкента равна T=14.6 °С, а средний уровень прямой и рассеянной горизонтальной радиаций в день 4.63 Квт*час/день и 1.69 Квт*час/день соответственно.
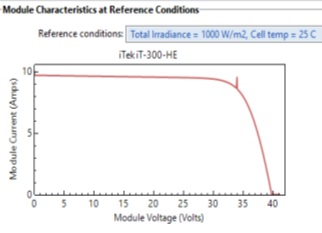
- Далее выбираем модуль iTek iT-300-HE, американского производства. Общая площадь 1.62 м2, Номинальной мощностью 325 Вт и с КПД до 20 %. Номинальная температура 25 °С. И с температурным коэффициентом 0.420 % или -1.367 Вт/°С.
- Затем выбираем инвертор. Инвертора модели «Solis-1.5 R-2G-US» от компаний Ningbo Ginlong Technologies.нам подойдет. Ниже приведены и характеристики инвертора. КПД=95 %, Uмин=100 Вольт, Uмакс=400 Вольт, Мощность 1400 Вт. Инвертор преобразует постоянный ток от солнечных батарей в переменный 220 вольт с частотой 50/60 Гц.
Вольтамперная характеристика модуля
Краткий вывод по трем выше выполненным пунктам:
Мы выбрали 4 модуля по 325 Вт мощности (итого 1300 Вт) для обеспечения потребности дома в часы пик, подключили их последовательно и к ним подключили инвертор. Общая площадь, занимаемая панелями более 1.6*4=6.4 м2. В первом случае панели фиксированы на месте, во втором случае установлена система слежения за солнцем. аккумулятор отсутствует, излишек выработанной энергий за счет современного ПО инвертора, в тот же момент продается в сеть по зеленому тарифу.
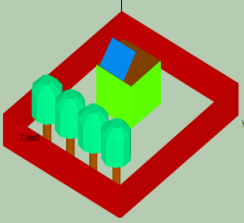
- 3D-моделирование условий местности проводится для определения периодов работы солнечных батарей.
Мы постарались смоделировать дом, обращенный прямо к востоку, расположили панели на крыше дома, и посадили деревья. Высота деревьев и точки установки панели примерно одинаковые h=30 м, а расстояние между ними довольно значительное порядка 20 метров, поэтому тень от деревьев не загораживает солнечный свет.
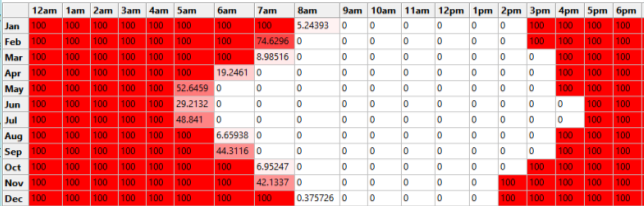
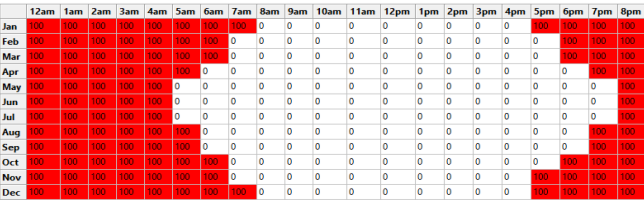
Как результат программа выдает нижестоящие таблицы. Красные ячейки — это промежутки времени, когда солнечная батарея не работает, розовые –работает частично, белые работают в номинальном режиме.
Для фиксированного типа
Для панелей с трекерной системой слежения за солнцем
- Последний этап: подсчет стоимости проекта:
Анализ стоимости можно проводить на любой срок. На этом этапе существует очень много финансовых инструментов, например, подсчет: суммы кредита, инвестиций, налогов и т. д. Кроме того существует возможность ввода ваших собственных затрат на электричество, с помощью которого можно более точно вычислить срок окупаемости проекта. Итак, допустим, что наш потребитель:
‒ расходует порядка 2400 Квт*час в год (по 200 Квт*час в месяц)
‒ платит по 1 Квт*час электричества 0.06 $ (только 1-й год)
‒ уровень повышения цен на электричество порядка 20 % в год.
‒ Излишек выработанной панелями энергий будет продаваться в сеть по зеленому тарифу.
А теперь сравним полученные результаты:
|
Величина |
Значение |
|
Величина |
Значение |
|
Общее количество энергий (за 1ый год) |
1694 Квт*час |
Общее количество энергий (за 1ый год) |
2190 Квт*час |
|
|
Коэффициент мощности |
14.9 % |
Коэффициент мощности |
19.2 % |
|
|
Коэффициент производительности |
0.67 |
Коэффициент производительности |
0.68 |
|
|
Плата за электричество (за 1ый год). По тарифу 0.06 $ за 1 Квт*час электричества |
$144 |
Плата за электричество (за 1ый год). По тарифу 0.06 $ за 1 Квт*час электричества |
$144 |
|
|
Счет за электричество при подключении системы (за 1-й год) |
$47 |
Счет за электричество при подключении системы (за 1ый год) |
$25 |
|
|
Сэкономлено с системой (за 1ый год) |
$97 |
Сэкономлено с системой (за 1ый год) |
$119 |
|
|
Уровень повышения цен на электричество |
20 % в год |
Уровень повышения цен на электричество |
20 % в год |
|
|
Период окупаемости |
4.7 лет |
Период окупаемости |
4.2 лет |
|
|
Капитальные затраты всего: (модуль, инвертор, монтаж и т. д.) |
$2288 |
Капитальные затраты всего: (модуль, инвертор, монтаж и т. д.) |
$2940 |
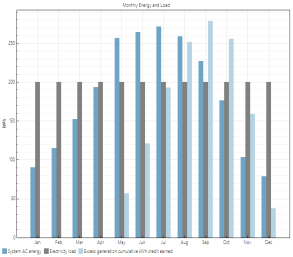
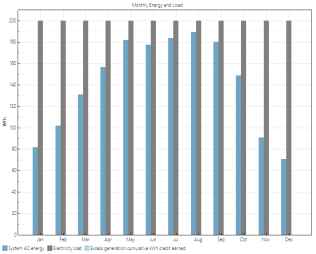
На графиках уровень потребления электричества обозначен фиолетовыми столбцами (200 Квт*час в месяц), а уровень производства энергий солнечными батареями — синими столбцами. При фиксированной установке панелей максимальное количество отдачи электричества составило 190 Квт*час энергий в Август месяце, а во втором случае 270 Квт*час в месяце Июль. Максимальная эффективность при использованиях трекерной системы возросла на 42 %. А среднегодовая с 1694 до 2190 Квт*час = Рост 29.2 %. Более того из графика видно, что фиксировано установленные панели не в состояниях покрыть полный уровень потребления даже в летние месяцы, а трекерные могут даже продавать излишек электричества в сеть.
Из этих расчетов видно, что срок окупаемости проекта менее 5 лет, что, на мой взгляд, не так уж много. Думаю, сфера солнечной энергетики является будущим энергетики Республики Узбекистан в целом.
Литература:
- Солнечная энергетика. В. И. Виссарионов, Г. В. Дерюгина Москва. 2008г.
- http://maps.google.com
- www.sener –power-process.com
- https://rentechno.ua/services/procurement/trackers.html
