





В работе приводится обзор существующих робототехнических систем. Рассмотрены сферы и вопросы использования роботов. Приведен анализ ведущих робототехнических организаций по росту внедрения роботов в промышленности, фармацевтике, медицине.
The paper provides an overview of existing robotic systems. Are examined the scope and use of robots. The analysis of the leading robotic organizations on the growth of the introduction of robots in various sectors and spheres of human activity is given.
Demand for robotic systems is constantly growing, in the literature more and more information appears, according to which robots and robotic complexes will replace a person. An analysis is given that shows an increase in the density of robotic equipment that has reached 74 robots per 10,000 employees on average. Robots are increasingly used in human activities such as medicine, space, fire control of buildings — extinguishing fires, entertainment, industry, airports, railway stations, hotels and other public places, the nuclear industry and as household appliances. By designation, robotic systems can be divided into industrial and household, with which the performance functions will be related: cutting, welding, assembly, packaging, etc.; by type of control: automatic, semi-automatic, stand-alone.
1. Введение
В литературе все больше появляется информации, согласно которой роботы и роботизированные комплексы заменят человека. Согласно данным, представленным Международной Федерацией Робототехники (IFR — International Federation of Robotics) плотность робототехнического оборудования по итогам 2016 года достигла 74 робота на 10 тысяч сотрудников. Эти усредненные показатели были получены из результатов исследований по разным странам: средняя плотность роботов в Европе достигла 99, в Америках — 84, а в Азии — 63 [1]. По данным ABI Research, численность промышленных роботов, продаваемых в США, в ближайшие 10 лет утроится. Аналитики Robotic Industries Association предоставили информацию, согласно которой в 2016 году в США было продано на 40 % больше таких устройств, чем в предыдущие 4 года. Наибольшее число роботов потребил автопром. За первые девять месяцев 2017 года в Северной Америке было продано 27 294 роботов стоимостью около 1,473 млрд. Долл. США, что является самым высоким показателем за любой другой год за тот же период времени. Эти цифры свидетельствуют о росте на 14 % в единицах и 10 % в долларах за первые девять месяцев 2016 года. [2].
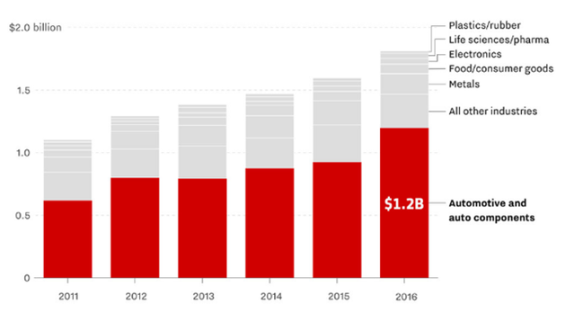
Рис.1. Данные Robotic Industries Association [11]
Как видно из рис.1, рост использования роботов неуклонно растет, причем не только в автомобилестроении, но и фармацевтической промышленности, в производстве продуктов питания и т. д.
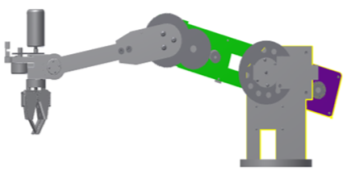
А как представить робота? Каждый представляет себе робота по-своему, а кампании, производящие роботов, также по-разному (Рис.2, 3).
|
|
|
|
Рис.2. Робот[1] |
Рис.3 Модель манипулятора И-00001 [12] |

Общим будет определение, согласно которому робот — это автоматическое устройство, работающее по определенной программе. Если сейчас проводятся состязания роботов, показывающие всю мощь каждого отдельного образца, то среди автономно работающих роботов идет борьба за сферы деятельности. К автономно работающим роботам относят беспилотные летательные аппараты (БПЛА) типа дрон (Рис 4, 5).
|
|
Рис. 5. Дрон[2] |
 Рис.4. Беспилотный летательный аппарат
Рис.4. Беспилотный летательный аппарат

Согласно определению ИКАО (ICAO-International Civil Aviation Organization
Международная организация гражданской авиации) БПЛА как «летательный аппарат, выполняющий полет без пилота (экипажа) на борту и управляемый в полете автоматически, оператором с пункта управления или сочетанием указанных способов» [3]. Министерство обороны США использует схожее определение, где единственным признаком БПЛА является отсутствие пилота [4]. ИКАО разделяет радиоуправляемые модели и БПЛА, указывая, что первые, предназначены прежде всего для развлечения и должны регулироваться местными — а не международными — правилами использования воздушного пространства [3].
2. Области применения
Робототехническая отрасль, как самостоятельная сформировалась к началу XXI века, но есть еще целый ряд вопросов относительно законодательной базы, открытости программных кодов и структуры в целом.
Одним из пунктов резолюции Европарламента «Нормы гражданского права о робототехнике», принятой в феврале 2017 года, говорится о самых разных аспектах и проблемах робототехники и искусственного интеллекта и в частности, «принцип самостоятельности подразумевает добровольное информированное согласие человека на взаимодействие с роботом, а принцип справедливости — правильное распределение созданных при этом благ». Интересный пункт этого документа — «право на undo», возможность отмены действия, которая должна стать обязательной функцией системы контроля робота. [5].
Несмотря на эти тонкости, роботы все шире применяются в таких сферах деятельности человека, как медицина, космос, контроль за пожарным состоянием зданий — тушение пожаров, сфера развлечений, промышленность, аэропорты, вокзалы, гостиницы и другие общественные места, атомная промышленность и в качестве бытовой техники. По назначению робототехнические системы можно разделить на промышленные (производственные или индустриальные) и бытовые, с чем и будут связаны функции выполнения: режущие, сварочные, сборочные, упаковочные и т. д.; по типу управления: автоматы, полуавтоматы, автономные. В отдельную категорию выделены бытовые роботы: кухонные, домашние помощники, роботы для домашних животных, роботизированная мебель, роботизированные умные дома, с управлением различных функций (Рис.6), роботы-чемоданы и т. д. Также применяются классификации по степени мобильности, специфике выполняемых операций, информаторы и др. Самостоятельной категорией оформлены роботы-преподаватели, роботы-учителя, и как смежная сфера- роботы-тренажеры для обучения. В авиационной технике роботизированные пилоты — призваны заменить летчиков, способны управлять любым типом летательного аппарата.
«Умный дом» или “Smart home” содержит систему автоматизации жилого или коммерческого здания.

Рис. 6. Управление освещением в «умном доме»[3]
Как отмечалось выше, роботизированные беспилотные летательные аппараты, работающие автономно, выполняют ряд функций. Поскольку БПЛА могут обладать разной степенью автономности — от управляемых дистанционно до полностью автоматических, а также различаться по конструкции, назначению и множеству других параметров, управление БПЛА может осуществляться эпизодической подачей команд или непрерывно. В последнем случае БПЛА называют дистанционно-пилотируемым летательным аппаратом (ДПЛА) [6]. Основным преимуществом БПЛА/ДПЛА является существенно меньшая стоимость их создания и эксплуатации (при условии равной эффективности выполнения поставленных задач) — по экспертным оценкам боевые БПЛА верхнего диапазона сложности стоят приблизительно $6 млн долл. США, в то время как стоимость сопоставимого пилотируемого истребителя составляет около 100 миллионов долларов. Недостатком БПЛА является уязвимость систем дистанционного управления, что особенно важно для БПЛА военного назначения [7].
По типу управления БПЛА можно классифицировать как:
‒ управляемые автоматически;
‒ управляемые оператором с пункта управления (ДПЛА);
‒ гибридные.
Взлетная масса БПЛА может колебаться от 200 граммов до 1000 килограмм, соответственно классифицируются как сверхлегкие, легкие, тяжелые. В зависимости от используемого оборудования БПЛА могут выполнять разведывательные функции, доставки или ударные (в случае использования дронов в военных целях).
3. Архитектура современных роботов
В своем развитии роботы прошли большой путь, от созданного в 1939 году первого робота-гуманоида компании «Westinghouse» Elektro высотой 2,1 метра, который мог произносить более 700 слов (при помощи пластинки) — простого механизма с одним действием, до нынешних интеллектуальных, уже сейчас способных заменить человека [8].
Весь накопленный опыт по автоматизации показывает сложность современных роботов, но и сложность архитектуры — они требуют все меньшего контроля на каждом этапе, а в ближайшем будущем роботы смогут и вовсе обходиться без вмешательства человека при выполнении большинства задач. Благодаря разработкам электроники, робот быстрее реагирует на изменение условий, выполняет задачи точнее и аккуратнее, чем человек.
Разрабатывая робототехнические комплексы, учитывают способности автономного робота [9]:
- Получение и самостоятельная обработка информации об окружающей среде;
- Работать больший период времени без человеческого вмешательства;
- Перемещаться целиком или перемещать какую-то свою часть в пространстве без помощи человека;
- Избегать создания опасных ситуаций для человека, имущества или для самого себя — если только это не предусмотрено спецификацией, характеристиками робота или поставленными ему задачами.
Таким образом, автономный робот может самостоятельно получать информацию, обучаться, совершенствовать свои алгоритмы и адаптироваться к изменениям в окружающей среде, но техническое обслуживание возлагается на человека.
На сегодняшний день предполагается, что в состав интеллектуального робота должны входить следующие системы:
‒ Исполнительные органы — это манипуляторы, ходовая часть и другие устройства, с помощью которых робот может воздействовать на предметы окружения. Причем по своей структуре это сложные технические устройства, имеющие в своем составе сервоприводы, мехатронные части, датчики, системы управления. По аналогии с живыми организмами — это руки и ноги робота.
‒ Датчики — это системы технического зрения, слуха, осязания, датчики расстояний, локаторы и другие устройства, которые позволяют получить информацию из окружающего мира.
‒ Система управления — это мозг робота, который должен принимать информацию от датчиков и управлять исполнительными органами. Эта часть робота обычно реализуется программными средствами [9].
Исполнительные механизмы и органы роботов оснащаются не только манипуляторами, но средствами технического, машинного зрения. Сюда входят системы распознавания образов, алгоритмический аппарат видеосистемы, блок принятия решения на основе базы знаний, блок обобщения данных. Робототехническая система, построенная на искусственном интеллекте, включает в себя такие подсистемы как:
‒ система навигации для ориентирования в пространстве;
‒ система планирования действий или система цели;
‒ система выполнения действий.
Рассматривается модель робота в виде уравнения
![]() , (1.1)
, (1.1)
где — x(t) вектор переменных состояния; f(x)– функция, удовлетворяющая условиям существования решения. Задается желаемая траектория движения x0 системы (1.1) и в некоторой ее области применяется процедура линеаризации, которая позволяет упростить анализ устойчивости системы, тем самым решить задачу управляемости системы (робота). Процедура линеаризации модели (1.1) позволяет привести ее к линейной системе вида
![]() , (1.2)
, (1.2)
где
 — матрица постоянных коэффициентов.
— матрица постоянных коэффициентов.
Для линейной системы устойчивость определяется собственными числами матрицы А. Что означает определение управляемости системы [10].
Для робототехнических систем требуется наличие большого числа параметров, связанных с требуемыми и произвольными состояниями, для которых характерны наблюдаемость и управляемость робота. Применительно к математической модели подвижного робота условия управляемости могут быть записаны в виде
![]() ,
,
![]() ,(1.3)
,(1.3)
![]() ,
,
где — ![]() потребные управляющие силы и моменты;
потребные управляющие силы и моменты; ![]() – имеющиеся в наличии управляющие силы и моменты;
– имеющиеся в наличии управляющие силы и моменты; ![]() – вектор состояния исполнительных механизмов робота.
– вектор состояния исполнительных механизмов робота.
Понятие наблюдаемости существенно при определении минимально необходимого сенсорного обеспечения и навигационного оборудования робота.
4. Заключение
Современный уровень науки и техники позволяет создавать роботы для выполнения узконаправленных задач, переходя от наблюдения и регистрации к конкретным действиям и воздействию на окружающую их среду.
Управляемость и наблюдаемость любого робота дают возможность определения всех переменных его состояния, получаемые результатам измерения выходных наблюдаемых переменных. Кроме того, современные технические средства позволяют проектировать робототехнические системы заданной формы и синтезировать модели управления роботами в векторной форме с управляющими воздействиями; с помощью объектно-ориентированных языков и платформ возможна привязка управлением роботом к мобильным устройствам.
Литература:
- International Federation of Robotics https://ifr.org/ International Federation of Robotics
2. North American Automation Market Shattering Records in 2017. https://www.robotics.org/content-detail.cfm/Industrial-Robotics-News/North-American-Automation-Market-Shattering-Records-in-2017/content_id/6929.
- Cir 328 AN/190 — Циркуляр ИКАО «Unmanned Aircraft Systems (UAS)».
- Joint Publication 3–30 — Command and Control of Joint Air Operations — 10.02.2014.
5. Civil Law Rules on Robotics (2015/2103(INL)) http://www.europarl.europa.eu.
- Сэмюэл Грингард. Интернет вещей: Будущее уже здесь = The Internet of Things. — М.: Альпина Паблишер, 2016. — 188 с.
- Rajesh Kumar. Tactical Reconnaissance: Uavs Versus Manned Aircraft // The Pennsylvania State University. — 1997. — № AU/ACSC/0349/97–03.
- Roland Siegwart, Illah Reza Nourbakhsh, Davide Scaramuzz: Introduction to Autonomous Mobile Robots. The Mit Press, zweite Auflage 2011.
- Roland Stenzel: Steuerungsarchitekturen für autonome mobile Roboter. Rheinisch-Westfälische Technische Hochschule Aachen, Fakultät für Mathematik, Informatik und Naturwissenschaften, 2002, abgerufen am 11. Dezember 2008.
- Лукинов А. П. Проектирование мехатронных и робототехнических устройств. СПб.: Изд-во «Лань», 2012.
- Robotics industry statistics. https://www.robotics.org/Industry-Statistics
- Вехтер Е.В., Сафьянникова В.И. Реализация проектного обучения при изучении дисциплины «инженерная графика» // Современные проблемы науки и образования. – 2015. – № 1-1.;URL: http://www.science-education.ru/ru/article/view?id=
[1] Робот, созданный в ТУИТ на кафедре МТ, призер конкурса ICT Week-2017
[2] Робот, созданный в ТУИТ на кафедре МТ, призер состязания между роботами ICT Week-2017
[3] Проект «Умный дом», выполнен под руководством Ж.А.Тажиева, ТУИТ, кафедра МТ, 2017г.
