





Проведем анализ результатов исследований эксплуатационных возможностей техники и технологии бурения наклонно направленных скважин. В качестве технических и технологических решений, обеспечивающих проводку сложных профилей наклонных скважин, рассмотрим два варианта вращательного способа бурения. Для этого рассмотрим пример проводки наклонно направленной скважины с использованием в качестве привода долота винтового забойного двигателя (ВЗД) и роторной управляемой системы (РУС).
Для проведения экспериментальных исследований, направленных на изучение динамики РУС в зависимости от вида профиля, параметров конструкции обсадных колонн и состава КНБК, рассмотрена скважина Приобского месторождения. Исследуемая имеет четырехинтервальный профиль, состоящий из вертикального участка, набора зенитного угла в интервале бурения под кондуктор, наклонно прямолинейного участка стабилизации зенитного угла до глубины ниже интервала работы насосного оборудования, уменьшения зенитного угла (Рис.1).
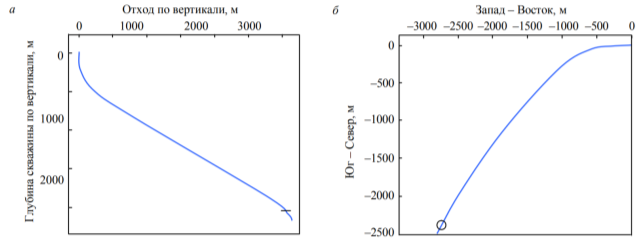
Рис. 1. Вертикальная (а) и горизонтальная (б) проекции скважины Усть-Тегусского месторождения
Длина вертикального участка составляет 80 м, зенитный угол в конце интервала набора (997 м) — 63 град. с максимальной интенсивностью искривления не более 1,1 град./10 м. На всем протяжении наклонно прямолинейного участка — участка стабилизации (до глубины 2199,27 м) угол не превышает 62–63 град.
С глубины 2199,27 м до забоя 2577,23 м происходит плавное снижение угла с 63 до 42 град. Интенсивность на участке снижения зенитного угла составляет не более 0,33 град./10 м. Общая длина скважины по стволу с учетом двух участков набора и падения кривизны и наклонно прямолинейного участка — 4863м. Отход от вертикали 3762,37 м.
Конструкция скважины представлена тремя колоннами: направление, кондуктор и эксплуатационная колонна. Направление и кондуктор диаметрами 0,530 и 0,245 м спускались на глубину 55 и 1000 м соответственно. Эксплуатационная колонна диаметром 178 мм спускалась до глубины 3705 м. В качестве привода долота использовался как ВЗД, так и РУС. Состав и характеристики КНБК отражены в таблице 1:
Таблица 1
Состав идлина КНБК Приобского месторождения
|
Параметр |
Длина элемента, м |
|
Долото/219,1 мм, PDC FXD65R |
0,29 |
|
Роторная управляемая система/PD 675 X5 AB 8 3/8" Stabilized CC |
4,11 |
|
Ресивер/PD SRX w Floatvalve |
1,72 |
|
Гибкая труба/FlexJoint |
2,95 |
|
Предохранительный переводник/LowerSaverSub |
0,37 |
|
Приборкаротажа/EcoScope with 8.25" Stabilizer |
7,66 |
|
Предохранительный переводник/LowerSaverSub |
0,36 |
|
Телеметрия/TeleScope 675 |
7,66 |
|
Предохранительный переводник/UpperSaverSub |
0,91 |
|
Немагнитное УБТ/6 3/4" NMDC |
8,71 |
|
Бурильные трубы/5" 19.50 DPS, Premium (15 Joint/15 труб) |
142,50 |
|
Бурильные трубы/ТБТ (1свеча) |
28,35 |
|
Противоприхватный механизм ЯС/Hydro-MechanicalJar |
6,17 |
|
Бурильные трубы/ТБТ (1свеча) |
28,35 |
|
Бурильные трубы/5" 19.50 DPS, Premium (390 Joint/390 труб) |
3705,00 |
|
Crossover |
1,23 |
|
Бурильные трубы/5–1/2 " 21.90 DPS, Premium |
916,66 |
Расчет оптимальных частот вращения верхнего привода в программном обеспечении производился в диапазоне от 20 до 200 об/мин с шагом в два оборота.
На рисунке 2 представлены результаты вычислительного эксперимента по определению осевой нагрузки, изгиба и момента при бурении скважины. Из рис.5 видно, что потеря осевой (синусоидальный изгиб) и пространственной (спиральной) устойчивости (Рис. 2, а) происходит в верхнем интервале от 100 до 1000 м, а также в нижнем интервале от 4600 до 4700 м — в месте снижения зенитного угла (при переходе от наклонно прямолинейного на искривленный участок) [1]. За счет потери устойчивости в местах перехода траектории профиля от искривленного участка к наклонно прямолинейному момент на верхнем приводе составляет более 50 кНм, что практически соответствует 80 % предела прочности материала бурильных труб на скручивание.
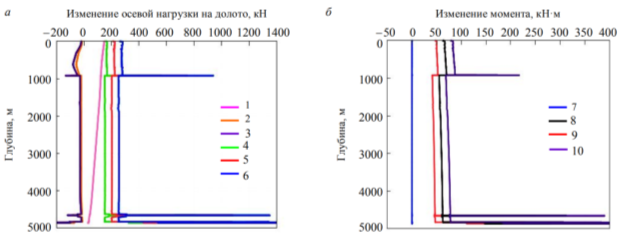
Рис. 2. Напряжения изгиба (а) и момента (б) при бурении скважины
Наличие сложно построенных профилей скважин, содержащих протяженные наклонно прямолинейные участки, которые в свою очередь сопряжены с искривленными участками набора и снижения зенитного угла с итенсивностью от 0,5 до 2,5 град. приводит к потере устойчивости БК, аварийным ситуациям с КНБК.
Анализ результатов исследований эксплуатации роторных управляемых систем показал, что при работе с частотой вращения верхнего привода от 120 до 125 об/мин происходит наступление резонанса (Рис. 3).
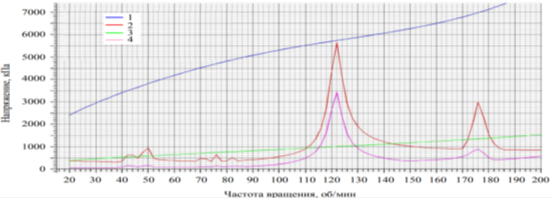
Рис. 3. Зависимость напряжений в КНБК при различных частотах вращения БК: 1 — осевое напряжение; 2 — изгибающее; 3 — скручивающее; 4 — срезающее
В данном диапазоне частот будет максимальное влияние изгибающих напряжений (поперечные колебания) и срезающих колебаний (перекашивающий момент). Основной источник колебаний связан с жесткой нижней частью КНБК [2, 3], расположенной на расстоянии до 20 м от долота.
Второй пик резонанса приходится на диапазон значений частоты вращения от 170 до 180 об/мин. В этом случае колебания связаны с участком КНБК от 30 до 150 м от долота, что соответствует секции толстостенных бурильных труб (ТБТ) диаметром 140 мм. Одним из вариантов снижения величины напряжений может быть исключение данной секции ТБТ из нижней части КНБК и установка их выше 200–300 м от долота на уровне расположения ударного противоприхватного механизма типа ЯСС. Кроме того, изменение вторых пиковых значений резонанса возможно снижением частоты вращения колонны до 160 об/мин или увеличением более 185 об/мин. Однако увеличение частоты более 185 об/мин ограничено техническими характеристиками существующих систем верхнего привода.
Наблюдаемые экстремумы крутильных колебаний представлены действием наибольших изгибающих и срезающих напряжений. В данной системе бурильной колонны и КНБК формируются автоколебания, приводящие к невозможности оперативной корректировки азимутальных и зенитных углов.
Увеличение амплитуды крутильных колебаний может привести к авариям в нижней части КНБК [4]. Изменение жесткости КНБК, например, с помощью свойств материалов инструмента, длиной или диаметральными соотношениями бурильных труб частично может решить данную проблему и позволит увеличить диапазон параметров частоты вращения верхнего привода от 120 до 140 об/мин. При этом управляемость КНБК снизится, а также увеличится риск прихватов колонны и желобообразование.
Оптимизацию частот вращения бурильной колонны необходимо осуществлять индивидуально для каждой рассматриваемой скважины с учетом траектории ее профиля, свойств горных пород, реологии бурового раствора и других основных технических характеристик динамически активных систем.
Итак, анализ эффективности использования роторных управляемых систем на Приобском месторождении показал, что высокоточное управление РУС имеет неиспользованный резерв системы обеспечения непрерывного бурения из-за сложности управления в режиме реального времени.
Литература:
- Liu X. H. Downhole Propulsion/Steering Mechanism for Wellbore Trajectory Control in Directional Drilling / X. H. Liu, Y. H. Liu, D.Feng // Applied Mechanics and Materials. 2013. Vol. 318. P. 185–190.
- Dvoynikov M. V. Technology of oil and gas wells drilling by downhole drilling motors. LAP LAMBER Academic Publishing ist ein Imprint der/is a trademark of OmniScriptum GmbH & Co. KG. Saarbrücken: Heinrich-Böcking-Str., 2013. Р. 18–29.
- Zheng S. J. Calculation Method for WOB Conducting of Directional Well / S. J. Zheng, Z. Q. Huang, H. J. A.Wu // Applied Mechanics and Materials. 2013. Vol. 318. P. 196–199.
- Сароян А. Е. Теория и практика работы бурильной колонны. М.: Недра, 1990. 263 с.
