





Мы хотели бы привлечь внимание читателя к имеющейся, и остающейся по нынешний день актуальной проблеме — применению, распространению и модернизации моделей промышленной робототехники. В данной работе будет представлен перспективный проект усовершенствования, методом замены механизмов захвата, уже существующего промышленного робота Вахтёр, разработанного американской корпорацией Rethink Robotics. Данный механизм всецело является «руками» модернизируемого робота, от действия которого зависит успех выполнения производственных задач. В качестве доказательной базы будут опубликованы, проанализированы и растолкованы расчеты основных характеристик робота, особенно значимые при его дальнейшей эксплуатации на производстве.
Ключевые слова: промышленная робототехника, Вахтёр, захватное устройство, конструкция манипулятора, робот.
We would like to draw the reader's attention to the existing and still relevant problem — the application, dissemination and modernization of industrial robotics models. This paper will present a promising improvement project, by replacing the capture mechanisms of the existing industrial robot Baxter, developed by the American Corporation Rethink Robotics. This mechanism is entirely the» hands " of the modernized robot, the action of which depends on the success of production tasks. As an evidence base will be published, analyzed and explained the calculations of the main characteristics of the robot, especially significant in its further operation in production.
Keywords: industrial robotics, Baxter, gripping device, manipulator design, robot.
Если каждому взяться за руки, то некому будет по ним бить.
Леонид Сухоруков
На сегодняшний день отечественному рынку роботизированных технологий есть к чему стремиться, вызвано это тем, что спрос на промышленных роботов будет всецело зависеть от заинтересованности руководства предприятий, для которых выход на новый уровень производственного оснащения зачастую является трудновыполнимой задачей. Преимущества от перехода на роботизированные технологии уже оценили во множестве зарубежных государств, где активно ведутся разработки и усовершенствование новейших образцов промышленной робототехники, которые в значительной мере увеличивают качество выпускаемой предприятием продукции, производительность и гибкость производственных процессов.
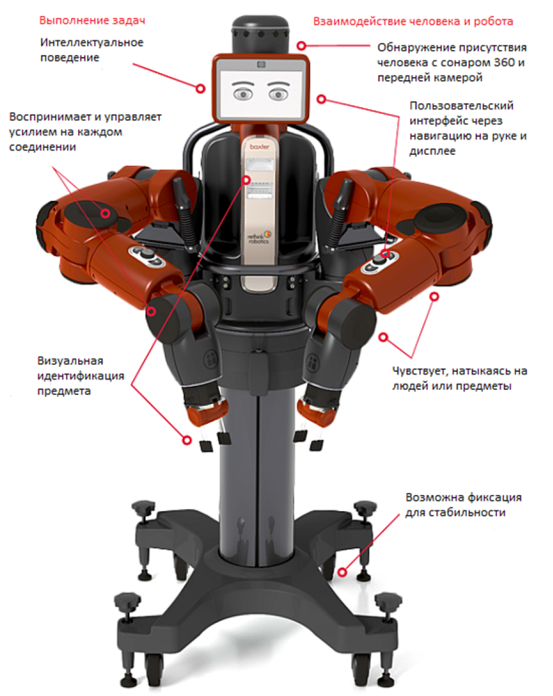
Еще 5 лет назад, был представлен Вахтёр- первый робот из разрабатываемого семейства доступных и интеллектуальных роботов, способных выполнять производственные задачи разной степени сложности. Как заявляет разработчик модели — американская инжиниринговая компания RethinkRobotics, Вахтёр– это высокотехнологичный показатель последних мировых достижений в области промышленной робототехники. Он наделен способностью, которая ранее была присуща лишь человеку — обучаемостью. Для обучения нужно просто подержать предмет перед его видеокамерами, расположенными в голове, грудной клетке и на концах обеих рук и показать требуемое действие или последовательность действий. Высокочастотный компьютер запоминает каждое движение, фиксируемое камерами, и воспроизводит их в точности, даже быстрее, чем это делает человек, его «обучающий». Вахтёробладает 360-градусным обзором и фронтальной камерой для определения присутствия людей в рабочем пространстве, двумя манипуляторами с 7 степенями свободы, мобильной подставкой с замками для передвижения и закрепления робота. Кроме того, машина оснащена полноценной системой управления, включающей само оборудование, программное обеспечение, управление, пользовательский интерфейс, систему безопасности и сенсоры.
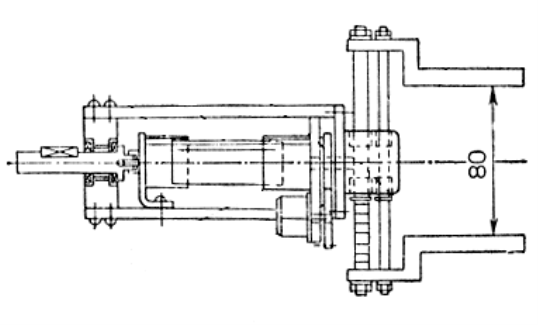
Однако сказать, что робот является совершенным нельзя, поскольку конструкция манипулятора выполнена по схеме захватного устройства с параллельным кинематическим механизмом скользящего типа — двумя параллельными зацепными губками перемещаются навстречу друг другу с помощью скользящего механизма. Главный недостаток данной конструкции манипулятора является сравнительно высокий коэффициент трения скользящих элементов вследствие неустранимых погрешностей при изготовлении и сборке скользящего механизма. Конструктивная особенность, являющаяся препятствием для получения продукции с наименьшим наличием шероховатостей на поверхностях готовых изделий.

На производстве изделий с предъявлением высоких стандартов качества этот минус будет особенно существенным.
Думаю, многим знаком афоризм «Золотые руки», который говорят в качестве комплимента опытному мастеру, безупречно знающему своё дело.
Но на данном этапе сделать подобный комплимент роботу Вахтёр довольно сложно. Но что можно еще сделать, если в конструкции манипулятора уже применены композиционные материалы, гораздо меньший коэффициент трения, чем металлы и сплавы?
Выход из данной ситуации есть! Для возможности работы промышленного робота Вахтёр в условиях, требующих минимального трения деталей с манипулятором данного типа, можно заменить его на другой, удовлетворяющий условиям выше поставленной задачи.
Лучшим решением стала установка на тестируемого робота захватное устройство рычажного механизма. Главные плюсы такого устройства — высокая сила зажима и гораздо меньшее значение коэффициента трения при захвате и удержании объекта производства.
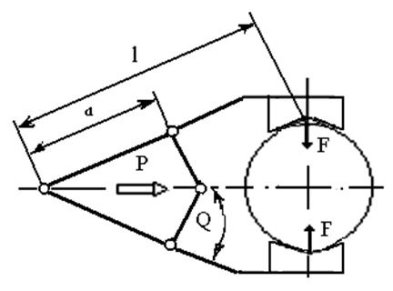
Также применение подобного решения позволяет снизить усилия при перемещении деталей, в трехмерном пространстве.
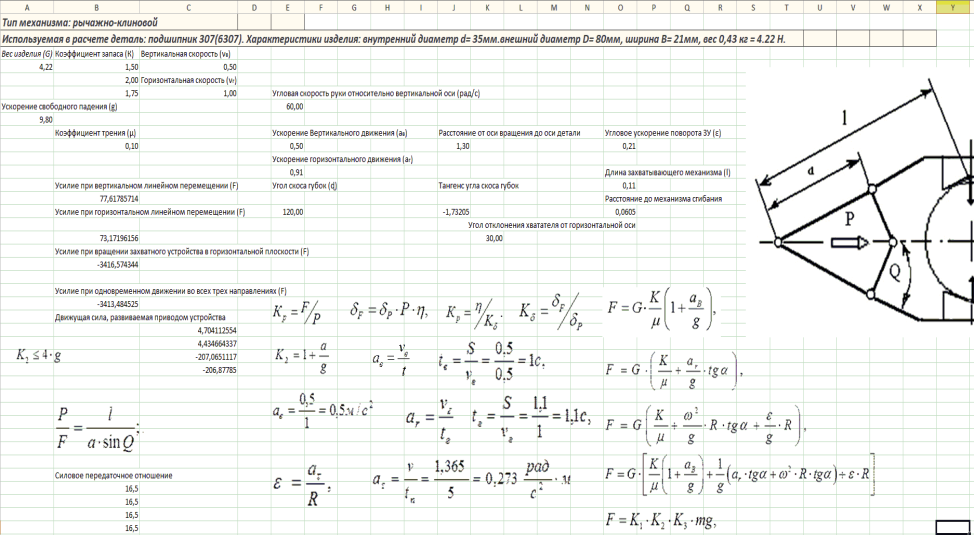
Данные выводы были сделаны не случайно, ведь каждый параметр имеет немалое влияние на качество продукции, получаемой на выходе после взаимодействия с промышленным роботом, поэтому каждый из них был вычислен, ссылаясь на стандарты предприятия и выполняемых роботом технических операций.
Вычисление коэффициентов для захватного устройства
В результате эксперимента, сфера применения робота Вахтёр в промышленности значительно расширилась, что особенно важно при его эксплуатации на многоотраслевых предприятиях, выпускающих продукцию с высокими предъявляемыми стандартами качества или же наукоемкую продукцию малых размеров.
Стоит ли говорить, какая огромная польза для развития отечественной промышленности была бы получена при массовом вводе в эксплуатацию модернизированных роботов разных конструкций и с применением инновационных технических решений? Но, к сожалению, этого пока не произошло. Остается лишь надеяться на то, что в ближайшем будущем этот парадокс исчезнет, а квалифицированные людские кадры будут рука об руку работать с машинами, которые ими же были созданы. Ведь только тесным взаимодействием человека и техники решатся все основные проблемы современности, и при подобном сотрудничестве бить по рукам будет некому, ибо обе стороны их уже пожмут друг другу.
Литература:
- “Выбор и расчет захватных устройств промышленных роботов” Я. Н. Отений, П. В. Ольштынский.
- [https://www.rethinkrobotics.com/baxter/]
- “Теория механизмов и механика машин” Поезжаева Е. В.
