





Для радиорелейных линий, работающих в режиме временного дуплекса, при расположении антенн радиорелейных станций (РРС) в непосредственной близости, необходимо обеспечить разделение доступа к среде передачи. Одним из способов разделения является использование синхронизирующего устройства (блок синхронизации — БС). Это устройство осуществляет управление режимами работы РРС, синхронизирует их работу во временной области. Применение подобных устройств позволяет более гибко конфигурировать радиорелейные линии (РРЛ). Данная статья описывает подобное устройство, его области применения и особенности разработки.
В роли БС был использован разработанный в НПФ «Микран» блок с четырьмя разъемами для питания и передачи информации в РРС, разъемом для питания всей системы, а также коммутатором, который обеспечивает доступ к РРС посредством стандарта Ethernet. Внешний вид БС представлен на рисунке 1.

Рис. 1. Внешний вид блока синхронизации
Подключение к блоку синхронизации для обмена по стандарту Ethernet производится по оптическому кабелю. БС так же включает в себя четыре порта (с драйверами Ethernet и интерфейса RS485) для подключения РРС. Через эти же порты в РРС осуществляется подача питания, посредством технологии PoE (Power over Ethernet). Роль устройства управления в этом блоке выполняет ПЛИС фирмы Altera — MAX10. Функциональная схема блока синхронизации представлена на рисунке 2.
Для управления РРС и передачи различных сервисных данных необходима организация транспорта данных между устройствами системы. Для этого используется имеющийся в устройствах интерфейс RS485 (передача данных описана разработанным оригинальным протоколом синхронизации).
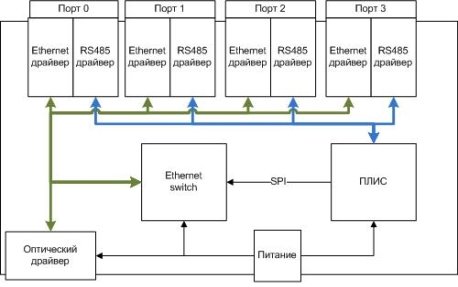
Рис. 2. Функциональная схема блока синхронизации
К БС предъявлены следующие требования:
– Синхронизация времени приема/передачи для всех станций, подключенных к модулю.
– Обеспечение питания ППУ
– Передача сервисной информации между станциями, подключенными к БС. Скорость потока данных — не менее 300 кбит/с.
– Для обеспечения безаварийной работы необходимо обеспечить джиттер начала циклов приема/передачи до 1 мкс.
Пояснение работы двух ППУ, согласованных по времени приема/передачи, представлено на рисунке 3. Здесь dT — джиттер начала циклов приема/передачи.
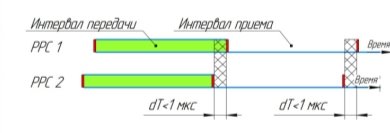
Рис. 3. Пояснение работы ППУ в режиме синхронизма
Предполагается использование системы для организации следующих ячеек РРЛ:
- БС и одно ППУ. БС используется в качестве модуля доступа;
- БС и два ППУ, как активный ретранслятор. В этом режиме работы оба радиоинтервала работают с одинаковыми параметрами (рисунок 4);
- БС и до четырех ППУ, как точка доступа («звезда»). В этом режиме четыре радиоинтервала обеспечивают доступ на каждую из оконечных точек (рисунок 5).
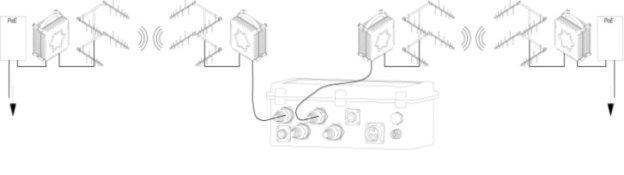
Рис. 4. БС-активный ретранслятор
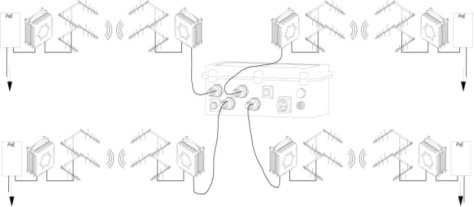
Рис. 5. БС-точка доступа
РРС, применяемые в связке с БС, работают в режиме временного дуплекса.
Алгоритмы системы
Связь между ППУ и БС производится через интерфейс RS485 — канал синхронизации. Режим работы интерфейса — полнодуплексный.
Частота следования данных в канале составляет 6 МГц, она определена характеристиками драйверов интерфейса RS485.
Основой разрабатываемого ПО стал протокол, используемый для передачи данных по каналу синхронизации — протокол синхронизации, использующий для передачи данных интерфейс RS485 (см. рисунок 2).
Передача информации осуществляется набором псевдослучайных последовательностей (ПСП), объединенных в пакеты. Прием ПСП производится согласованными фильтрами БС и ППУ. Такой подход упрощает разработку и избавляет от необходимости обеспечивать когерентность приемника и передатчика.
Учитывая требуемую скорость потока данных для передачи (не менее 300 кбит/с) и частоту следования данных в канале (6 МГц), была выбрана ПСП с базой 16 бит. С такими характеристиками канала теоретическая пропускная способность составляет 375 кбит/с. Однако, теоретическая скорость передачи данных реализуема лишь при полном использовании канала. В разработанном протоколе введены защитные интервалы между передаваемыми пакетами данных. Защитные интервалы составляют не более 10 % от пропускной способности канала, с учетом этого реальная скорость передачи данных не менее 340 кбит/с, что удовлетворяет требованиям.
Все передаваемые в канале синхронизации данные поделены на логические пакеты, которые, в свою очередь, объединены в кадры. Коммутация пакетов и их обработка, реализованы в ПЛИС БС и ППУ.
Типы передаваемых пакетов:
– Пакет синхрометки. Определяет начало интервала приема/передачи;
– Пакет данных. Данные телеметрии и сервисные данные. Передается постоянно, после пакета синхрометки;
Так как БС не имеет дополнительных пользовательских портов, то доступ к регистрам управления БС возможен только через канал синхронизации, т. е. из ППУ. Для этого был организован эмулятор протокола SPI поверх протокола синхронизации между ППУ и БС.
Для подключения ППУ к БС используются кабели различной длины. Для устранения погрешности, вызванной возникающими в кабелях задержками, в ПЛИС БС заложен алгоритм, обеспечивающий подстройку начала интервала работы ППУ. Это избавило от необходимости жестко контролировать длину соединительных кабелей.
Оценка системы
Основной величиной, характеризующей точность работы системы, является джиттер начала интервалов приема/передачи ППУ, подключенных к БС. Так как разработка производилась для ПЛИС, было принято решение о создании аппарата сбора статистики в ПЛИС ППУ.
Для получения отладочных данных, два ППУ были соединены при помощи шлейфа, на который были выведены уровни напряжения, соответствующие интервалам приема/передачи данных. Низкий уровень напряжения соответствует режиму приема, высокий уровень — режиму передачи. Схема стенда представлена на рисунке 6.
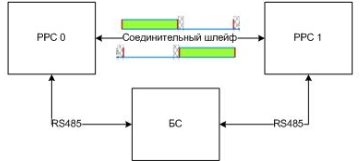
Рис. 6. Схема отладочного стенда
При передаче уровней напряжения через соединительный шлейф возникает эффект «завала» фронтов сигнала, что обусловлено неидеальностью проводников. На высоких тактовых частотах необходимо учитывать длительность фронтов сигнала, т. к. переход из логического «0» в логическую «1» происходит при превышении порогового уровня напряжения (2.4 В для данного типа ПЛИС [2]).
Так же необходимо учесть задержку на время распространения сигнала по соединительному шлейфу.
Суть работы аппарата сбора статистики заключается в следующем:
В течении 64 интервалов приема/передачи данных ППУ производится усреднение джиттера интервалов и вычисляется его среднее значение (Sсред). Также производится поиск максимального значения разброса начала интервалов (Sмакс).
Измерение величин возможно только в состоянии синхронизма системы. Для этого после запуска системы производится первичная настройка и только затем проводится эксперимент.
Обе величины можно считать случайными, так как их смещение вызвано деградацией опорных частот обоих ППУ и БС, участвующих в эксперименте. Так же смещение начала интервалов компенсируется на основе логики.
Для величин Sсред и Sмакс были построены графики функции плотности распределения случайной величины, представленные на рисунке 7. Выборка данных для обеих величин суточная. В расчетах учтены задержки сигнала из-за среды распространения и неидеальности фронтов.
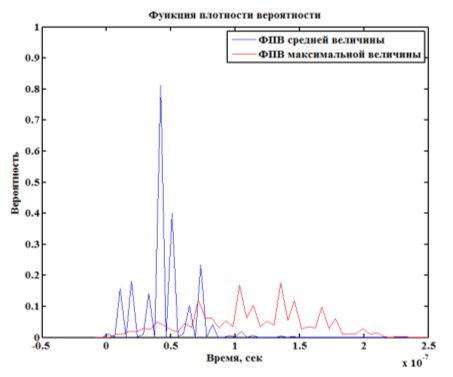
Рис. 7. Плотность распределения максимального и среднего отклонения начала интервалов
Анализируя рисунок 7, можно предположить, что представленные на рисунке случайные величины подчинены нормальному закону распределения, что вполне ожидаемо. Так же отклонение максимальной величины разброса начала интервалов не превышает заданные пределы (20 тактов — 1 мкс).
Заключение
Разработана и экспериментально проверена система синхронизации радиорелейных станций. Проведена оценка основных параметров системы. Характеристики системы удовлетворяют требованиям.
Используемый в системе транспорт, так же удовлетворяет требованиям передачи данных в ограниченной полосе частот с использованием интерфейса RS485. Дополнительно реализована проверка целостности передаваемых данных контрольной суммой CRC16.
Доработка ПО обеспечит поддержку разных параметров (сигнально-кодовых конструкций и полосы частот) и режимов работы (ведущий-ведомый) радиоканала РРС. Это увеличит гибкость системы.
Литература:
- Дж. Ф. Уэйкерли. Проектирование цифровых устройств. Москва: Постмаркет, 2002 г..
- Стешенко В. Б. ПЛИС фирмы Altera: проектирование устройств обработки сигналов. Москва: Додэка, 2000 г..
- Баскаков С. И. Радиотехнические цепи и сигналы: Учебник для вузов. — М.: Высшая школа, 1988 г.
