





Робототехника внесла существенный вклад в повышение производительности и качества, однако ввод в эксплуатацию роботизированной ячейки, а так же обучение высококвалифицированных специалистов (в том числе и студентов) в условиях реального производства может оказаться весьма затратным с точки зрения финансов и времени.
Широко используемые компьютерные информационные технологии наглядно поясняют теорию реальных процессов и объектов, но не дает возможности поработать с реальной аппаратурой. Поэтому актуальна разработка виртуальных моделей реальных технологических объектов (роботов, станков и т.п.).
Проектирование методического и материально-технического обеспечения лабораторных циклов по учебным дисциплинам связано с преодолением достаточно противоречивых ограничений, среди которых наиболее существенными представляются:
сохранение дидактических средств для приобретения навыков работы с приборами и исследуемыми объектами;
гибкость комплектования лабораторных установок объектами исследования и приборами;
обеспечение мер безаварийной эксплуатации приборов и сохранности исследуемых объектов в процессе выполнения работы и при непреднамеренных нарушениях режимов;
стоимость обеспечения лабораторного цикла;
возможность тиражирования и поставки средств обеспечения лабораторных циклов потребителям.
Для ознакомления студентов с роботами и обучения технологическому программированию рациональнее использовать учебные модели роботов или трехмерные виртуальные модели, с системой управления соответствующей системе реального робота [4, c. 102]. Но и настольные роботы весьма дорогостоящи. Модели роботов имеют ряд преимуществ и особенностей, таких как:
модель имеет все степени свободы присущие реальному технологическому объекту,
модель предусматривает режим Авария - ситуацию, связанную с недопустимым действием робота, например, удар рабочим органом о стол или другой предмет,
предусмотрен режим восстановления после аварии,
расположение рабочих окон и в Ручном и Автоматическом режимах не вызывает затруднений в прочтении данных и наблюдении за объектом,
реализованы подсказки, позволяющие ориентироваться пользователю в интерфейсе программы – имитатора,
модель позволяет рассматривать сцену в различных ракурсах в трёхмерном пространстве,
можно изменять уровень освещения сцены, выбрать раскраску, включать и отключать объекты, которые в данный момент мешают увидеть перемещение блоков модели,
в файле помощи содержатся исчерпывающие инструкции по работе с соответствующей моделью.
Учитывая описанные выше преимущества, были реализованы виртуальные модели, которые в настоящее время успешно используются во время проведения лабораторных работ по дисциплинам, связанным с изучением гибких производственных систем. В частности разработаны компьютерные имитаторы робота РБ241 с позиционным управлением, покрасочного робота с контурным управлением и модель горизонтального копировально-фрезерного станка, и так же построена модель пневматического робота ЦПР-1П с цикловым программным управлением.
Для построения моделей использовались программные среды Delphi, SolidWorks, Autodesk 3ds Max.
Интерфейс имитатора робота РБ241 изображен на рисунке 1. Он включает в себя трехмерную сцену, состоящую из виртуальных модели робота и окружающей обстановки с рабочим столами, операторскую панель для выбора режимов работы, пульт управления. Модель позволяет перемещать предметы в трехмерном пространстве.
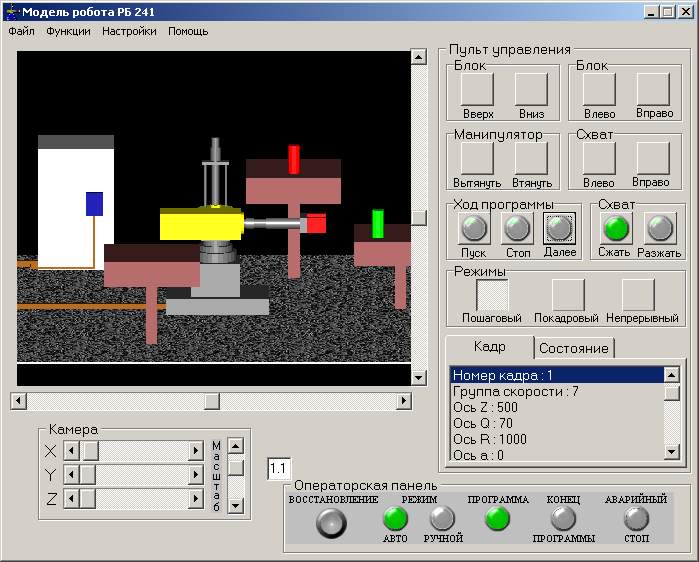
Рис. 1. Модель робота РБ241
Управление может производиться последовательно по одной из осей Z, Q, R цилиндрической системы координат, по оси α (вращение схвата) и перемещением лапок схвата.
Выбор ручного или автоматического режимов работы задаются с пульта управления и операторской панели. Последовательность выполнения технологических операций в автоматическом режиме задается технологической программой (ТП). Рабочий орган робота передвигается в режиме позиционного управления от одной специфицированной точки к другой. Информация о каждой точке записывается в кадр ТП (достаточно точно соответствующей реальной системе программирования робота), и состоит из информации положений рабочего органа (геометрическая информация), группы скорости движения и служебных координат для приведения в движение схвата.
Программа может выполняться в непрерывном, покадровом или пошаговом режимах, которые используются, как и в реальном роботе, для отладки программы, например для контроля ошибок управления или наличия аварийных ситуаций.
Модель покрасочного робота изображена на рисунке 2 и отличается алгоритмом решения геометрической задачи. Здесь используется контурное управление движением рабочего органа (краскопульта) по заданной технологической программой нелинейной траектории в трехмерной пространстве. В модели предусмотрена регулировка интенсивности факела распылителя и смена цвета закрашивания. Робот может окрашивать нелинейные поверхности.
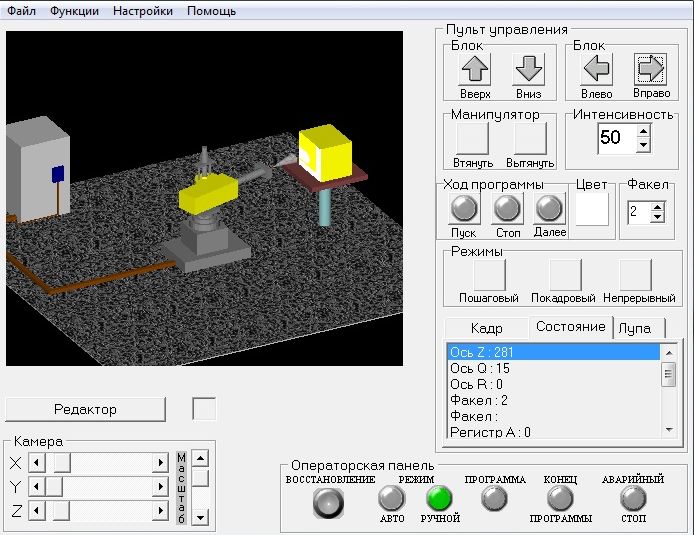
Рис. 2. Модель покрасочного робота
На основе пространственной модели копировально-фрезерного станка, изображенной на рисунке 3, студенты могут ознакомиться с принципами построения станка, ознакомиться с технологическим программированием в кодах ISO, широко применяемых в системах управления различными технологическими объектами. На этой модели, возможно, исследовать различные алгоритмы копирования изделий на станке и алгоритмы управления динамическим объектом в многомерном пространстве.
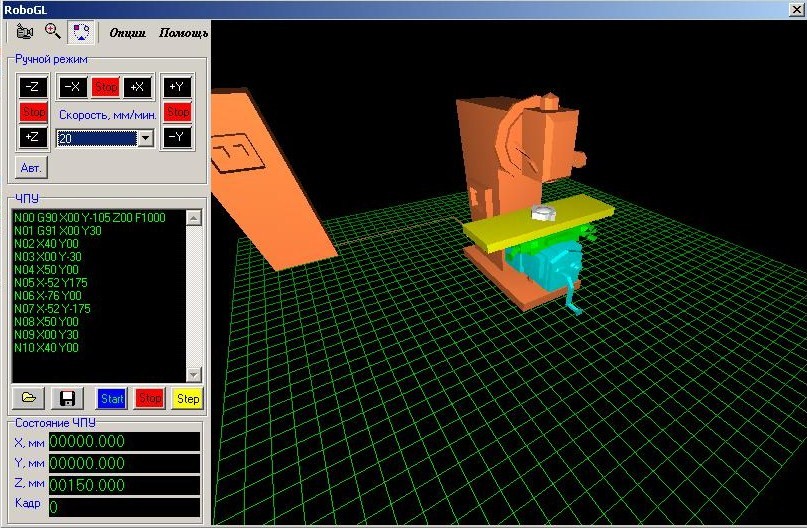
Рис. 3. Модель фрезерного станка
Модель станка обеспечивает:
перемещение рабочего стола по трем координатам в декартовом пространстве в ручном режиме и в автоматическом в соответствии с задаваемой ТП,
подготовку, редактирование, сохранение и считывание ТП, представленной в кодах ISO,
режим копирования изделия,
режим воспроизведения скопированного изделия,
режим управления в соответствии с введенной ТП,
установку на рабочем столе заготовки для изготовления детали или детали для копирования из заданного набора.
Ручное управление моделью станка осуществляется кнопками, расположенными на виртуальном пульте управления. В ручном режиме модель обеспечивает мерные и немерные перемещения рабочего стола. Скорость, с которой осуществляется движение, задается с помощью меню регулятор переключения подачи и имеет размерность мм/мин.
В модели реализованы автоматический и пошаговый режимы выполнения ТП. Текст ее выводится в специальное окно ввода и редактирования текста. Редактировать ТП можно с клавиатуры. Автоматическое выполнение программы осуществляется по нажатию клавиши START. Во время ее выполнения блокируются кнопки ручного управления и пошаговый режим.
Нажатие кнопки STEP позволяет выполнять УП в полуавтоматическом режиме (выполнение одного кадра). Абсолютные перемещения по координатам в ручном, автоматическом и пошаговом режимах выводится на экран в виде цифровой индикации.
Команда загрузить деталь позволяет устанавливать объект (деталь) на стол станка. Команда луч включает (отключает) отображение луча, предназначенного для сканирования изделия и запоминания его формы.
Особенность модели робота ЦПР-1П, изображенной на рисунке 4, состоит в том, что она предназначена не только для изучения системы программирования, но и позволяет изучать структурную организацию робота.
Модель построена в системе автоматизированного проектирования SolidWorks, позволяющей проводить инженерный анализ и подготовку производства изделий любой сложности и назначения.
Промышленный робот ЦПР-1П предназначен для автоматизации процессов подачи или удаления деталей в сборочном и штамповочном производстве и автоматизации операций загрузки-разгрузки технологического оборудования различного назначения.
В модели запрограммирована система управления роботом идентичная системе управления настоящим роботом ЦПР-1П. Управление роботом включает два режима: автоматический и ручной, при этом ручной несколько упрощен для более легкого восприятия и знакомства с моделью.
Для подготовки программ в модели присутствует панель управления, которая реализована с помощью макросов, написанных на языке программирования Microsoft Visual Basic 6.5, при помощи SolidWorks API (интерфейс прикладного программирования).
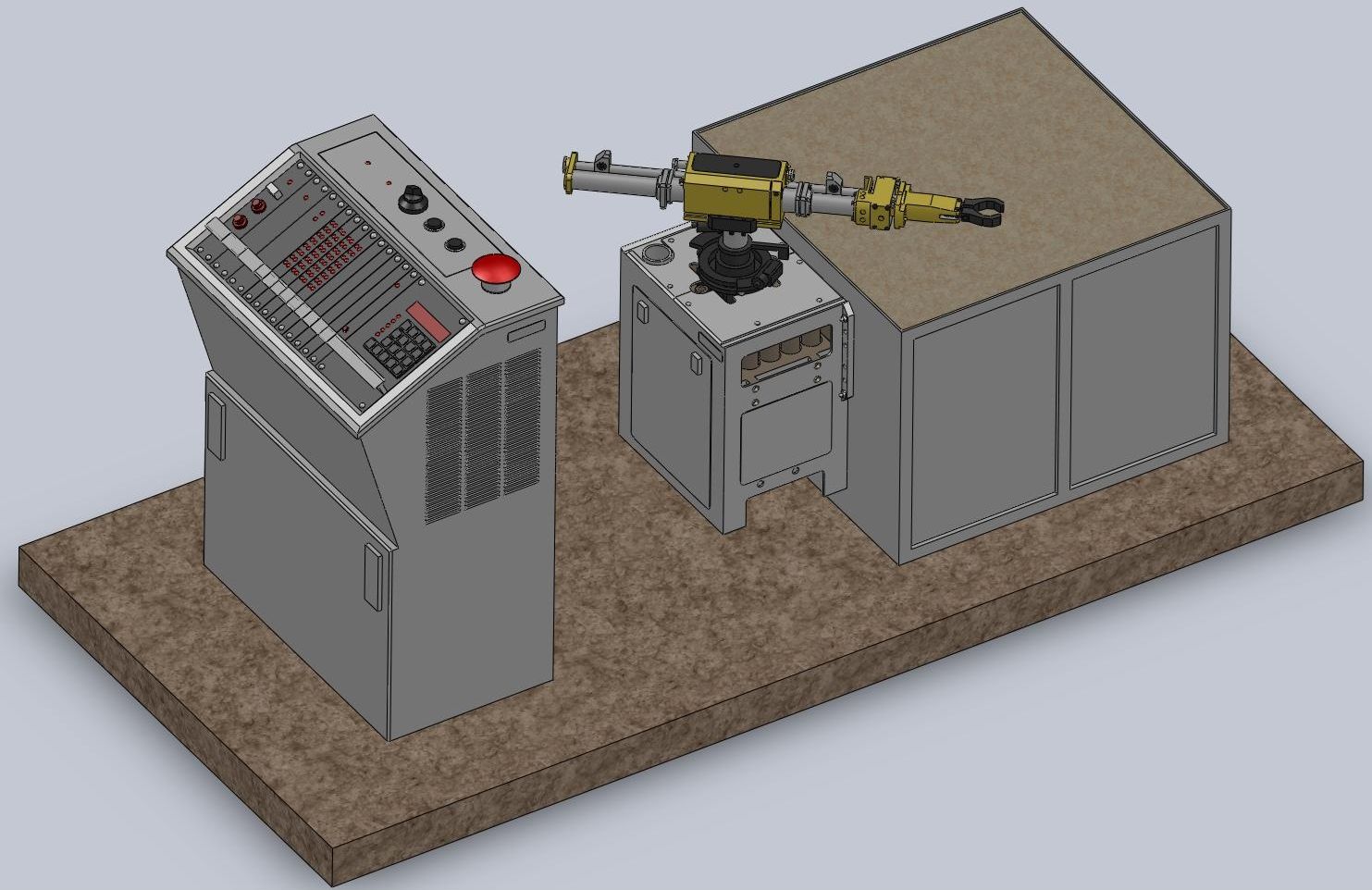
Рис. 4. Модель пневматического робота
Главное отличие модели от других это простота интерфейса, приятная визуализация модели и крайне высокая детализация внешнего вида робота и пульта управления. Однако отсюда и недостаток, пожалуй, единственный, но весомый – невозможность работы модели без установленного пакета SolidWorks.
Одним из направлений в изучении манипулятора ЦПР-1П является работа с виртуальной моделью, позволяющей изучить внешнее и внутреннее устройство робота.
Демонстрация выполнена в интерактивном виде и представляет собой сборку манипулятора из основных модулей (на рисунках 5 и 6 изображена модель, реализованная в пакете Autodesk 3ds Max 2010).

Рис. 5. Демонстрация работы манипулятора

Рис. 6. Окружающая обстановка робота ЦПР-1П
Сначала пользователю, на вкладке Внешнее устройство предлагается из основных модулей элементов собрать робот (рисунок 7), порядок сборки строго определен.
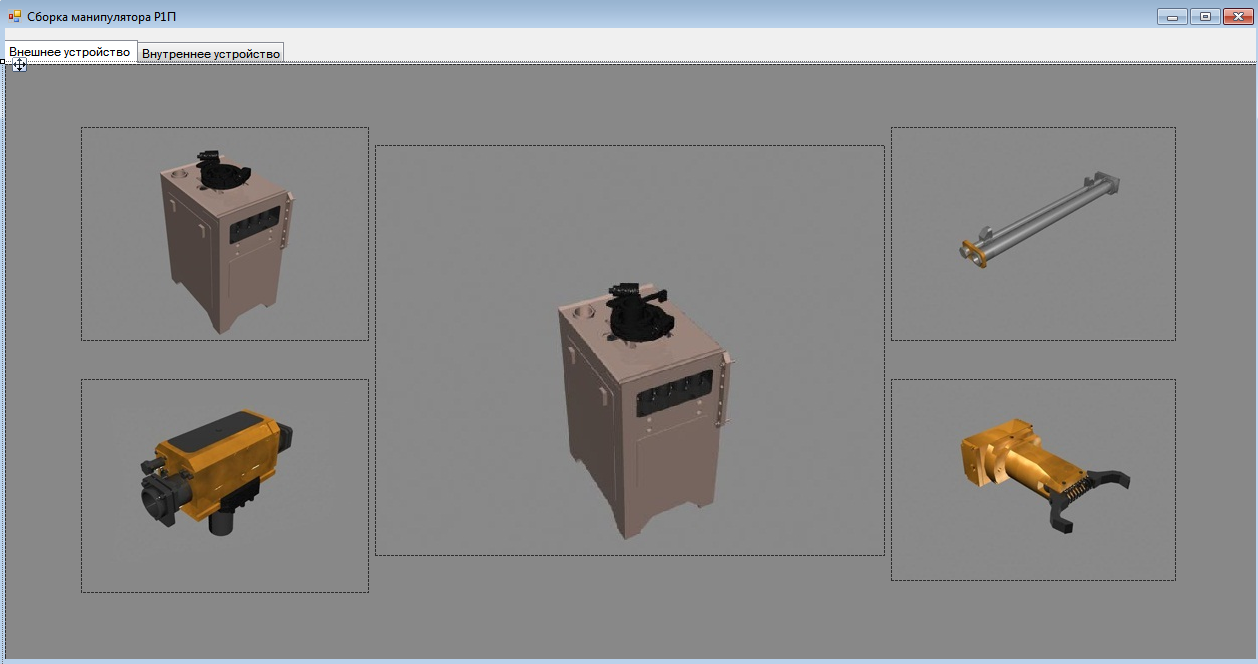
Рис. 7. Пример сборки робота
При нарушении порядка будет появляться уведомление – Неверный порядок сборки, если порядок верен, то – Сборка успешно завершена. Кнопка сброс поможет в любой момент вернуться к начальным значениям. Кнопка Демонстрация станет активной только после завершения сборки, нажав на нее, загрузится интерактивная анимированная модель манипулятора ЦПР-1П, которая предоставляет возможность рассмотреть робот и анимацию его движения со всех сторон.
Перейдя на вкладку Внутреннее устройство, изображенную на рисунке 8, пользователь сможет собрать внутренние блоки манипулятора, так же ограниченные строгим порядком.

Рис. 8. Сборка внутреннего устройства робота
Для обучения студентов особенностям построения и технологического программирования гибкого автоматизированного производства была разработана модель ГАП на основе виртуальных моделей сборочного робота, копировально-фрезерного станка, технологического конвейера, склада [4].
Все модели входящие в ГАЛ расположены в последовательности изображенной на рисунке 9.
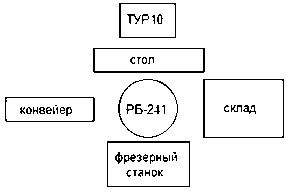
Рис. 9. Схема расположения моделей на сцене
Модель сварочного робота создана на основе реального сварочного робота ТУР-10. Основная область их применения – это автоматизация точечной и дуговой сварки, зачистка заусенцев после штамповочных операций, сортировка и отбраковка продукции, загрузка буферных межоперационных накопителей. Эти роботы имеют антропоморфный манипулятор с пятью или шестью звеньями в зависимости от модификации. Модель выполняет только необходимые нам функции реального робота, а именно проведение сварки.
Модель обеспечивает: перемещение манипулятора робота по трем координатам в сферической системе координат; перемещение рабочего органа робота в автоматическом режиме, согласно загруженной технологической программе; процесс сварки нескольких различной формы деталей; возможность изменять угловую скорость манипулятора в ручном и автоматическом режимах. В модели предусмотрены аварийные ситуации типа залипание электрода и исчезновение искры.
Разработанные модели широко используются при обучении студентов по очной и дистанционной технологиям в ТГУ и ТУСУРе (г. Томск) [1, 2, 3].
Литература:
Раводин О.М. Использование современных технологий в учебном процессе ВУЗа / О.М. Раводин, Л.А. Туровец, А.П. Зайцев, М.С. Бахарев // Успехи современного естествознания. – 2004. – №3. – С. 59–61.
Зайцев А.П. Программные средства для дистанционного обучения / А.П. Зайцев, О.М. Раводин, А.А. Шелупанов // Открытое и дистанционное образование. – 2003. – №2. – С. 20–26.
Зайцев А.П. Опыт организации дистанционного обучения студентов на каф. КИБЭВС ТУСУРа / А.П. Зайцев, О.М. Раводин, Л.А. Торгонский // Межвузовский сборник научных трудов. Сер. Образовательные технологии. – 2005. – Вып. 14.
Раводин О.М. Модель гибкой производственной линии и ее использование в учебном процессе / О.М. Раводин, Л.А. Козлова // Успехи современного естествознания. – 2008. – №1. – С. 102–104.
