





Сформулирована постановка задачи системного инжиниринга в области проектирования и построения системы управления оптико-электронными приборами воздушных роботов — беспилотных летательных аппаратов. Выявлены основные условия и факторы, подлежащие учёту при определении состава, свойств, алгоритмов и схем функционирования автономной системы управления бортовыми приборами. Изложены требования и особенности выполнения задач поиска, обнаружения, целеуказания и сопровождения наземных объектов (целей). Определены типовые расчётные объекты и параметры для оценки архитектуры и возможностей применения системы управления разведывательных аппаратов при полётах в сложных городских условиях.
Ключевые слова: беспилотный летательный аппарат (БЛА), автономная система навигации и ориентирования (АСНО), оптико-электронные приборы (ОЭП), система управления (СУ).
Современный этап развития науки и техники характеризуется активизацией разработок и массовым применением робототехнических комплексов. Они создаются как перспективные средства выполнения сложных, трудоёмких и опасных для человека задач.
Воздушные роботы — беспилотные летательные аппараты (БЛА) — применяются для мониторинга и охраны обширных территорий и важных объектов, обнаружения очагов и последствий стихийных бедствий, техногенных аварий и катастроф, пожаров и наводнений, для картографического и метеорологического обеспечения, контроля и анализа состояния нефте- и газопроводов, доставки малогабаритных грузов. Управление полётом беспилотных машин осуществляется по радиоканалу с использованием орбитальных средств глобальных систем спутниковой навигации и ориентации: GPS (США), ГЛОНАСС (Россия).
Для решения задач в военной сфере создаются и производятся БЛА различного вида, класса и типа. Наиболее массовыми являются разведывательные, ударные и транспортные летающие роботы. К беспилотным комплексам военного назначения предъявляются жёсткие требования, обусловленные спецификой задач, условий и способов применения. На современных летательных аппаратах, прежде всего среднего и малого радиусов действия в качестве полезной нагрузки устанавливаются оптико-электронные приборы (ОЭП). Как правило, они крепятся на гиростабилизированной платформе (основании) и являются органами технического зрения для операторов воздушных робототехнических комплексов.
Системы навигации, позиционирования и радиокомандного управления полётом БЛА подвержены воздействию радиоэлектронных и электромагнитных помех, что обусловливает их уязвимость. Возникает необходимость разработки, создания и применения автономных систем навигации и ориентирования (АСНО) БЛА. Особую важность приобретает обеспечение полётов беспилотников в различных высотных эшелонах и сложных условиях: в горных районах, над труднодоступной местностью, днём и ночью, при противодействии противника средствами ПВО и радиоэлектронной борьбы, в городах с высотной застройкой, крупных промышленных населённых пунктах [1].
Требованиями назначения разведывательных БЛА являются: проведение воздушной разведки, рекогносцировки и картографирования местности (поверхности, пространства); поиск, обнаружение (идентификация) и сопровождение объектов интереса с определением их координат; целеуказание и контроль обстановки с передачей видеоизображений в наземный пункт управления в реальном масштабе времени [2].
В зарубежных и отечественных образцах и моделях БЛА оптико-электронные приборы (датчики, телекамеры, тепловизоры, дальномеры) и системы управления ими обеспечивают выполнение следующих функций:
– формирование сигналов телеметрии, отслеживание, контроль и установление режимов и параметров полёта;
– фиксирование аберраций и выработка команд-сигналов на устранение (парирование) ошибок, отклонений следования по заданному маршруту;
– создание и ориентирование полей зрения, зон визуального просмотра (контроля) окружающего пространства, подстилающей поверхности;
– картографирование, обнаружение, распознавание и захват на автоматическое сопровождение интересующих участков местности, водной поверхности и (или) контрастных объектов (целей);
– формирование телевизионных и (или) тепловизионных видеосигналов и их обработка с последующей передачей данных на наземный пункт управления;
– наведение и гиростабилизация линии визирования приборов в зависимости от условий и программы полёта, удержание в поле зрения или в перекрестии выбранной цели определённое время;
– вычисление координат движущихся и неподвижных наземных, надводных объектов (целей);
– целеуказание, в том числе лазерная подсветка обнаруженных целей для обеспечения стрельбы огневых комплексов с применением управляемых снарядов, ракет, бомб, торпед.
Оптико-электронные приборы, предназначенные для выполнения задач картографирования, размещаются на жестком неподвижном основании летательного аппарата, ориентируются перпендикулярно подстилающей поверхности. В результате их работы формируются массивы фотоснимков для последующего создания карт местности. Обработка снимков и информации производится с помощью специализированного программного обеспечения в наземной станции управления. Подобная схема построения функциональной системы реализована не только в комплексах с пилотируемой авиацией, но и в архитектуре оптической корреляционной системы DSMAC (Digital Scene Matching Area Correlation), которая используется в американских крылатых ракетах «Томагавк» [3].
Принцип действия системы DSMAC: автоматическое сравнение изображения местности, формируемого бортовым видеодатчиком, с предварительно загруженным в память носителя ортофотопланом, обнаружение опорных точек, выявление аберраций и внесении соответствующих поправок в инерциальную навигационную систему. В оптической корреляционной системе крылатой ракеты используется телевизионная камера с широким вытянутым полем зрения, ориентированным перпендикулярно подстилающей поверхности.
Сопряжение и сочетание функций разведывательных и картографических ОЭП может позиционироваться как конструктивно-технологическая предпосылка создания универсального автономного беспилотного комплекса, предназначенного для решения широкого спектра задач. Важную роль при проектировании и построении АСНО на основе объединения свойств и возможностей ОЭП будет играть выбор, комплектование и внедрение миниатюрной системы управления (СУ) бортовой аппаратурой, приводами и механизмами БЛА. Возникает необходимость исследования вариантов состава, характеристик и алгоритмов функционирования СУ ОЭП беспилотных летательных аппаратов.
Стержневым конструктивным элементом СУ ОЭП для обеспечения автономного функционирования БЛА является оптико-механический блок.
Конструктивно оптико-механический блок устанавливается на корпусе (фюзеляже) БЛА на горизонтальной поворотной платформе и состоит из двух частей:
1) неподвижная часть с тремя обзорными камерами, смещёнными последовательно относительно друг друга на угол 45°, формирующими единое «бесшовное» поле обзора для АСНО, картографирования и обнаружения объектов интереса;
2) вертикальный подвес с узкопольными телевизионным и тепловизионным каналами (камерами), съюстированными с лазерным целеуказателем-дальномером.
Внешний вид и приборный состав оптико-механического блока показаны на рисунке 1.
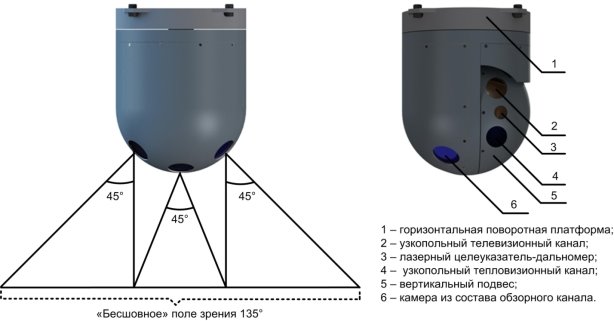
Рис. 1. Оптико-механический блок БЛА
Особенности работы СУ ОЭП и новизна логической схемы взаимодействия между обзорными и узкопольными каналами заключаются в реализации следующих функций:
– обзорный канал формирует изображение местности, в котором производится обнаружение образов объектов интереса, хранящихся в энергонезависимой памяти ОЭП;
– координаты обнаруженного объекта интереса в растровой системе координат обзорного канала вычисляются и преобразуются в управляющие сигналы для приводов горизонтального и вертикального ориентирования, перемещения каналов с целью наведения узкопольного канала на объект;
– узкопольный канал формирует изображение участка местности, в котором подсистема видеообработки производит автоматическое распознавание (идентификацию) образов объектов интереса посредством сравнения с эталонными изображениями, хранящимися в энергонезависимой памяти ОЭП;
– распознанный (идентифицированный) объект захватывается подсистемой видеообработки на автоматическое сопровождение в узкопольном канале.
Согласно предложенной схеме функционирования СУ ОЭП решение задач сопровождения объектов и целеуказания полностью возлагается на узкопольные каналы, перемещаемые бортовыми приводами горизонтального и вертикального ориентирования. При этом обзорный канал постоянно направлен перпендикулярно вниз и может быть развёрнут по азимуту, что обеспечивает оптимальную ориентацию для горизонтального отслеживания, просмотра, ориентирования по подстилающей поверхности и получения отметок для картографирования.
В современных бортовых СУ БЛА оптические каналы располагаются в едином оптико-механическом блоке. Их оси сориентированы (выставлены) относительно друг друга параллельно. Переключение между широким и узким полями зрения производится достаточно просто. В предлагаемой же приборно-функциональной схеме обзорный канал формирует растровое поле с широкой зоной обзора, а узкопольный канал обеспечивает значительное увеличение какой-либо части поля зрения и, соответственно, просматриваемого участка зоны обзора. Это является новизной в проектировании состава полезной нагрузки разведывательных БЛА, в частности, архитектуры и компоновки СУ бортовыми ОЭП.
Анализ возможностей и способов применения разведывательных БЛА, прежде всего малоразмерных аппаратов коптерного типа, показал, что наиболее сложным процессом является совершение полётов в городской среде. Особенности полётов БЛА в городе: высокая скорость движения и маневрирование в воздухе, смена режимов горизонтального, вертикального перемещения и зависания, необходимость получения, обработки и передачи видеоизображений в форматах 2D и 3D; проявление таких ограничивающих факторов, как многоэтажные застройки, перекрытие полей зрения, многообразие наземных объектов (целей) различной конфигурации, наличие электромагнитных помех, низкое соотношение сигнал/шум, противодействие противника средствами радиоэлектронной борьбы и стрелковым оружием.
Классификационные признаки и параметры городских застроек, которые необходимо учитывать при формировании исходных данных для системного инжиниринга, моделирования и оценки эффективности функционирования СУ ОЭП БЛА, приведены в таблице 1 [4, 5, 6].
Таблица 1
Параметры элементов инфраструктуры городских застроек
|
Параметры |
Тип застройки |
||||
|
Малоэтажная |
Средней этажности |
Повышенной этажности |
Многоэтажная |
Высотная |
|
|
Количество этажей |
1–3 |
3–5 |
6–10 |
10–25 |
25–30 |
|
Высота домов, строений при расчётной высоте одного этажа 3,3 м), м |
9,9 |
16,5 |
33 |
82,5 |
99 |
|
Общая ширина улицы, дороги, м |
13,0 |
14,5 |
30,9 |
33,9 |
41,4 |
|
Ширина проезжей части, м |
7,5 |
7,5 |
22,5 |
22,5 |
30,0 |
|
Количество полос движения автотранспорта |
2,0 |
2,0 |
4,0–6,0 |
4,0–6,0 |
6,0–8,0 |
|
Ширина тротуара, м |
2,25 |
3,0 |
3,0 |
4,5 |
4,5 |
|
Площадь зоны размещения мачт освещения, м2 |
0,5 |
0,5 |
1,2 |
1,2 |
1,2 |
Наименование и характеристики типовых (расчётных) объектов для прогнозирования и оценки эффективности применения АСНО БЛА и разведывательных аппаратов с СУ ОЭП, приведены в таблице 2.
Таблица 2
Типовые расчётные объекты для моделирования полёта иоценки эффективности АСНО БЛА
|
Наименование типовых (расчётных) объектов |
Размеры типовых объектов (длина × ширина × высота), м |
|
Одиночный человек |
0,5 × 0,3 × 1,8 |
|
Точечные вертикальные объекты (цели): амбразура в строении, окно здания, огневая точка в сооружении |
0,1 × 1,5 × 1,4 |
|
Группа людей |
3,0 × 2,0 × 1,8 |
|
Автотранспорт, орудие, пусковая установка |
4,0 × 1,8 × 1,6 |
|
Грузовой автотранспорт, легкобронированная техника, малоразмерное плавательное средство |
7,0 × 2,5 × 3,0 |
|
Бронированная техника: танк, боевая машина пехоты, бронетранспортёр, катер |
7,0 × 3,0 × 2,5 |
|
Групповые, площадные объекты (цели): позиция подразделения, окоп, укрепление, блокпост, огневая позиция, установка противовоздушной обороны, автомобиль с радиоэлектронными средствами |
10,0 × 3,0 × 2,0 |
|
Одиночное здание |
80 × 12 × 15 |
|
Промышленные объекты (группа зданий) |
50 × 12 × 10 |
|
Объекты городской инфраструктуры (электростанции, водоочистные сооружения, коммуникации, объекты связи и др.) |
20 × 15 × 5 |
Для моделирования полётов БЛА и режимов функционирования СУ ОЭП вдоль магистралей и участков дорожных сетей, при формировании исходных данных и конкретизации условий поиска движущихся колонн и единиц автомобильного транспорта и техники протяжённость просматриваемого маршрута может выбираться по результатам анализа топографических карт или космических снимков. Длина участка может назначаться произвольно и составлять: от нескольких сот метров до нескольких тысяч километров. Ширина магистралей 15–20 м, шоссе 5–10 м, дорог 3–5 м. Заметим, что такие же значения протяжённости и ширины просматриваемых участков могут быть приняты при рассмотрении условий полёта БЛА вдоль железнодорожных магистралей и путей.
Известно, что геометрические размеры поля зрения, наблюдаемых участков местности и объектов интереса в растре бортовых оптических каналов ОЭП зависят от высоты полёта БЛА. Определение оптимальной высоты полёта БЛА является одной из частных исследовательских инженерно-технических задач. Решение задачи связано с выбором условий моделирования и установлением требований, предъявляемых к СУ ОЭП. Большое значение будет иметь прогнозирование точности и продолжительности процессов обнаружения и распознавания (идентификации) важных мобильных и стационарных объектов. Основное содержание многовариантных задач прогнозирования составляет дефиниция и формализация показателей географических, климатических, метеорологических условий, освещённости местности и контрастности объектов. При моделировании полётов БЛА в городской среде необходимо учитывать также массогабаритные ограничения полезной нагрузки летательных аппаратов, свойства и характеристики ОЭП, возможности по исключению зон перекрытия полей зрения, создаваемых элементами городской инфраструктуры. Требуется прогнозировать типовые условия совершения безаварийных полётов БЛА, то есть прокладку траекторий выше домов и между высотными зданиями (строениями), без столкновений с препятствиями и между собой. Всё это обусловливает потребность информационного анализа и выбора в качестве исходных данных характеристик городских строений, сооружений, объектов. Главная цель — составление рациональных маршрутов полёта БЛА в районах с плотной и высотной городской застройкой.
Критериями оценки эффективности функционирования СУ ОЭП могут служить точность следования БЛА по заданному маршруту, точность подлёта к объекту-ориентиру или к заданной цели, время реакции и надёжность работы управленческих каналов, количество управляемых аппаратов в группе и т. п. В качестве обобщённых показателей (критериев) могут выступать вероятности обнаружения, распознавания (идентификации) объектов и выполнения разведывательных задач за заданное время.
Естественно, что расширение функциональных возможностей разведывательных БЛА должно и может быть реализовано путём применения высокопроизводительной СУ, включающей с свой состав миниатюрный высокоскоростной аппаратно-программный вычислительный комплекс. Достижение требований автономности полёта БЛА, без постоянной связи с наземными станциями управления и (или) средствами космических навигационных систем тесно связано с разработками интеллектуальных блоков, приборно-алгоритмических устройств, обеспечивающих принятие решений в реальном времени. Это способствует разработке, проектированию и созданию беспилотных роботов с элементами искусственного интеллекта.
Таким образом, требования к системе управления ОЭП БЛА должны отражать задачи и прогнозируемые показатели эффективности их выполнения. Поставленная научно-исследовательская задача предполагает моделирование автономных полётов и разработку способов определения качественно-количественных характеристик объектов разведки и процессов их поиска, обнаружения, распознавания (идентификации), сопровождения. Решение задачи, относящейся к системному инжинирингу, заключается в разработке исходных данных, методик и алгоритмов расчётов, позволяющих определять показатели основных условий, факторов и критериев оценки эффективности выполнения программ полёта БЛА.
Разработка требований к автономной системе управления ОЭП перспективных воздушных роботов должна проводиться с учётом возможностей создания и внедрения высокопроизводительных и быстродействующих бортовых аппаратно-программных комплексов.
Литература:
- Шведов П. Е., Темник Я. А., Исламов В. К., Хаметов Р. С. Приборы для автономной системы навигации и ориентирования беспилотных летательных аппаратов // Молодой ученый. — 2018. — № 46. — С. 60–65. — URL: https://moluch.ru/archive/232/53743/ (дата обращения: 06.10.2019).
- «Орлан-30» идёт в войска? — URL: https://missiles2go.ru/2018/11/24/orlan-30/ (дата обращения: 06.10.2019).
- США впервые представили за рубежом новейшую крылатую ракету Tomahawk Block IV — URL: https://tass.ru/mezhdunarodnaya-panorama/5711329 (дата обращения: 06.10.2019).
- Классификация зданий по этажности, выбор этажности — основные факторы — URL: https://studopedia.org/6–21106.html (дата обращения: 06.10.2019).
- Лестницы жилых и общественных зданий с высотой этажа 3,3 м — URL: http://gran-stroi.ru/lestneytca-dom-etazh-vysota-3300.php (дата обращения: 06.10.2019).
- СП 42.13330.2011 Градостроительство. Планировка и застройка городских и сельских поселений. Актуализированная редакция СНиП 2.07.01–89* (с Поправкой и Изменением N 1) — URL: http://sniprf.ru/sp42–13330–2011 (дата обращения: 06.10.2019).
